Technische Grundlagen 2
Eggo - Feel Me

Die Aufgabe war es zwischen uns über eine Analoge/Digitale Schnittstelle zu Kommunizieren. Dies sollte nicht wie üblich über Displays mit klaren Textnachrichten geschehen, daher mussten wir selbst dieses Kommunikationskonzept entwerfen.
Zu beginn entschieden wir uns dazu Gefühle und Aktivitäten zwischen uns auszutauschen. Welches ein eher abstraktes Thema beinhaltete. Wie können wir Eingaben von Gefühlen und Aktivitäten über ein einzelnes Gerät ohne Tastatur verwirklichen und wie kann dazu die Ausgabe aussehen.
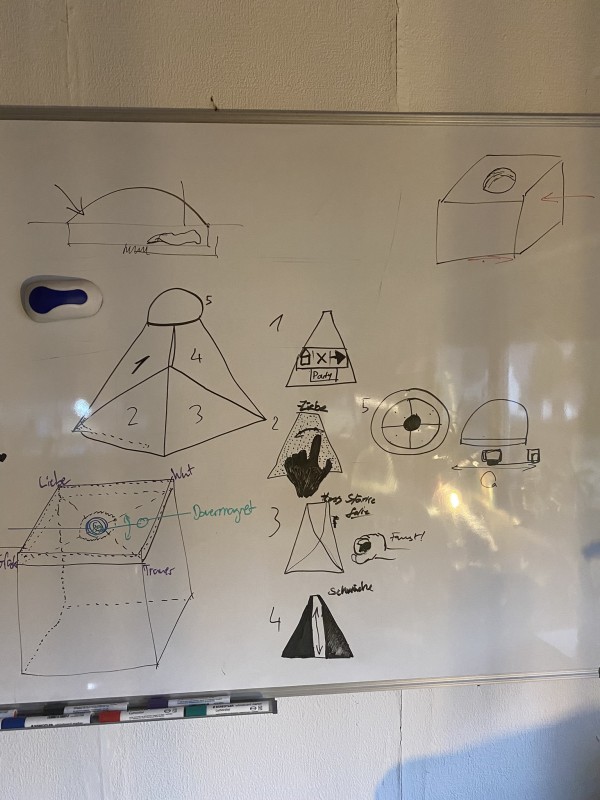
Wir fingen an Skizzen für die Konzeption anzufertigen.
Zu beginn waren wir begeistert von dem Verhalten von Ferrofluiden, hatten dabei allerdings Darstellungsprobleme durch die richtige Ansteuerung dieses Fluids. Weswegen wir dies wieder verwerfen mussten.
Das Konzept bestand daraus Wackelbewegungen eines Ei’s als Ausgabe von Gefühlen zu nutzen. Für die Darstellung von Aktivitäten nutzen wir eine Farbcodierung wie zum Beispiel Grün für konzentriertes Arbeiten oder Rot für Romantik.
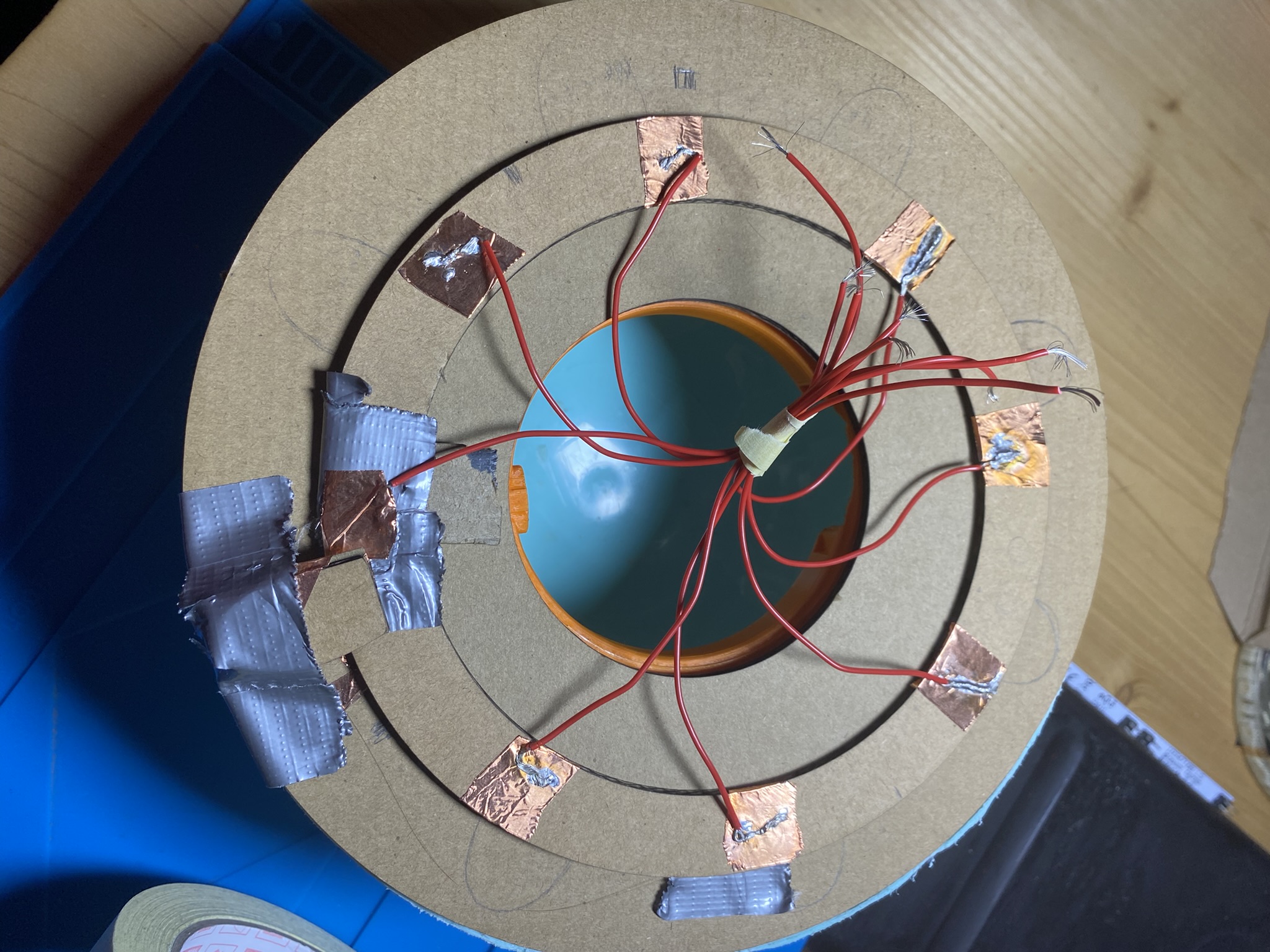
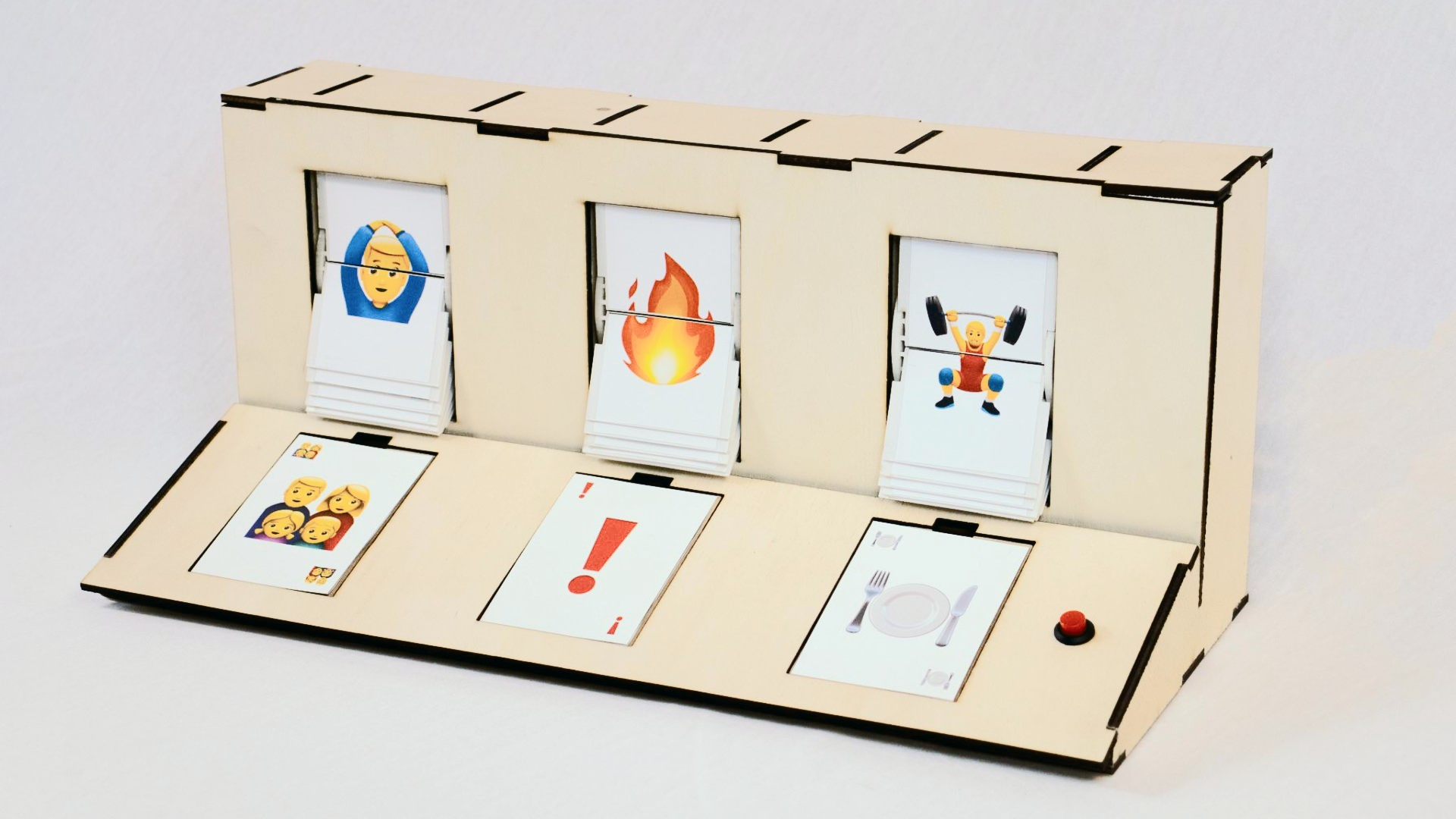
Die Eingabe von Gefühlen wollten wir über direktes Schütteln, Niederlegen oder auch andrehen von unserem Prototypen darstellen. Bei der Eingabe von Aktivitäten entschieden wir uns ähnlich wie bei der Farbcodierung über den simplen Drehmechanismus welcher verschiedene Positionen beinhaltet.
Durch ein Gyroskop (MPU6050) im Prototypen nutzen wir die erhaltenen Beschleunigungswerte und gelieferten Werte der Drehbewegungen in Winkelsekunden um diese auszuwerten und an den jeweilig anderen Prototypen zu senden. Ein von uns entworfenes Drehmodul (hier dargestellt als Pappprototyp) diente zum auslesen der jeweiligen Position und dadurch Aktivität welche wir darstellen wollen.
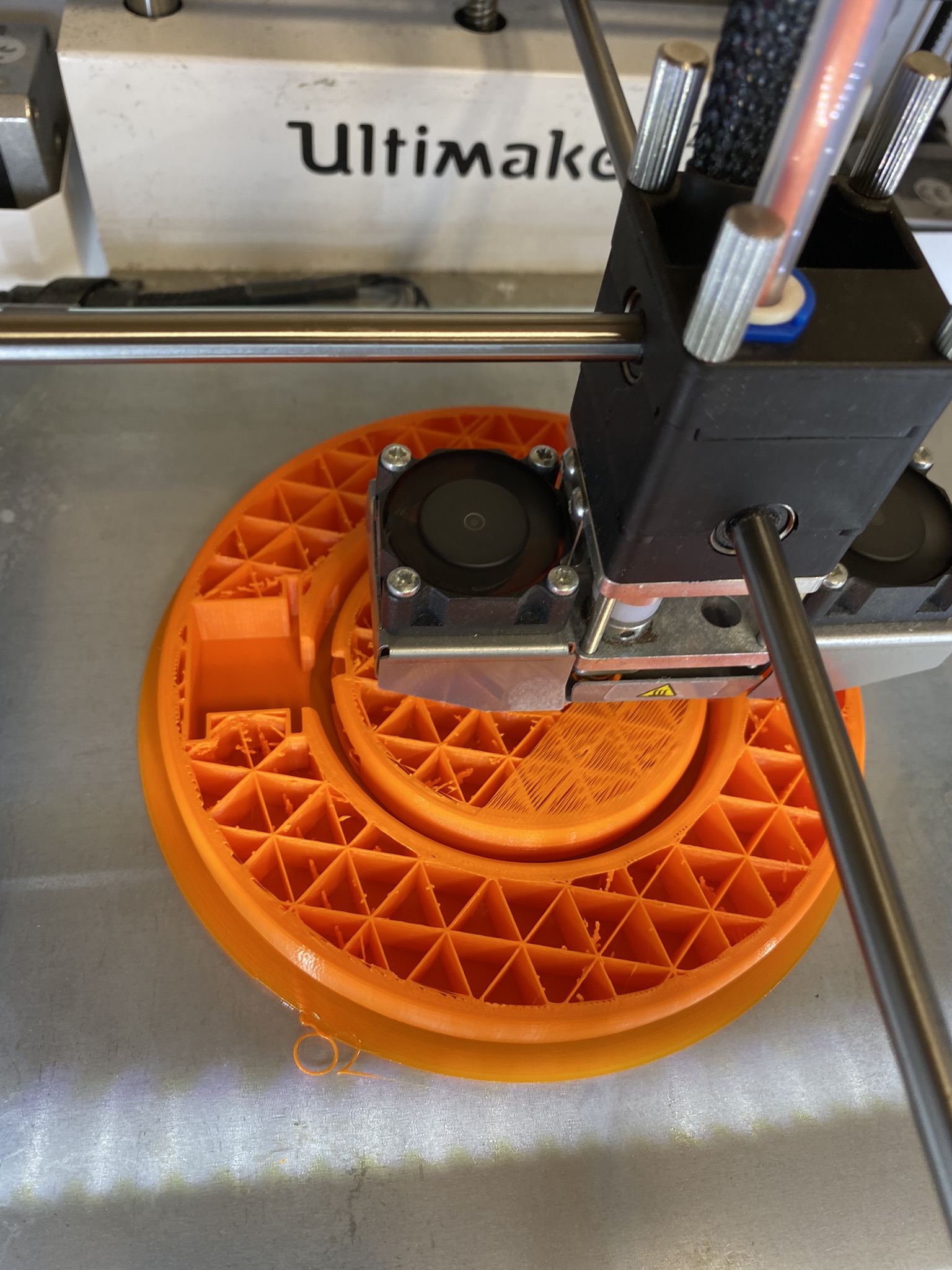
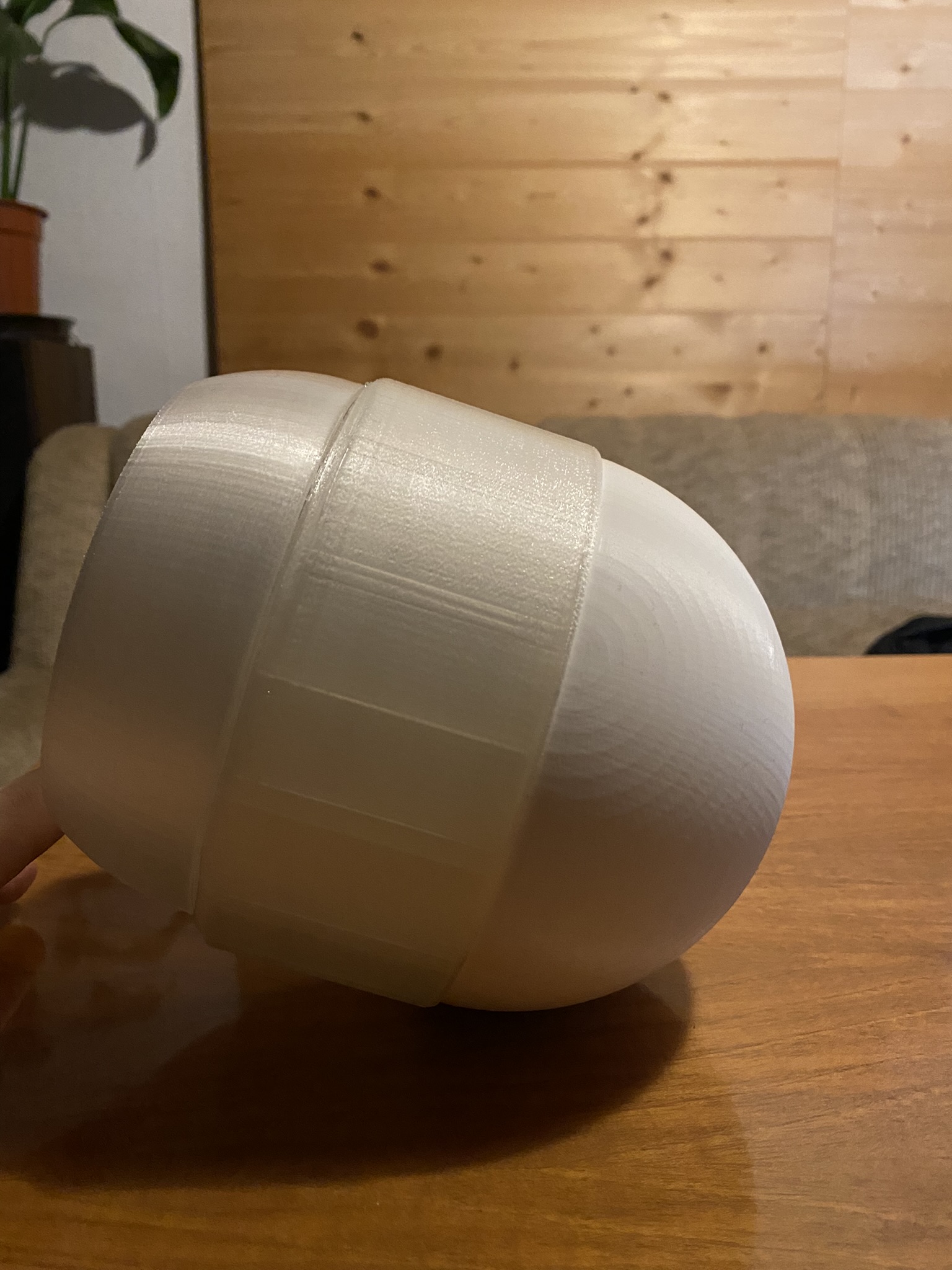
Die Ausgabe erfolgte durch einen LED-Stripe welcher sich durch verschiedene RGB Werte kontrollieren lies so können wir die gewünschte Aktivität in der Oberen Hälfte (welche mit Transparentem Filament 3D gedruckt ist) durchscheinen lassen.
Die Emotionen, das Wackeln unseres Prototypen konnten wir mit 2 Servomotoren welche auf einem Doppelgelenk jeweils um 90° versetzt angeordnet sind darstellen.
Dadurch haben wir nun eine Stehauf Figur dessen Schwerpunkt wir in X und Y Richtung frei versetzen können.
Unsere erste Halbkugel war lediglich eine modifizierte Rührschüssel, welche wir durch einsetzen eines Laserbearbeiteten Holzmodells und anbringung von Servo motoren in seinem Verhalten so kontrollieren konnten wie von uns gewünscht.
Die Ersten 3D Modelle entstanden, verschiedene Formen wurden getestet und die Ausarbeitung des Pendels und dessen Gelenk wurde vertieft. Die Modelle zu drucken dauerte teilweise über 10 Stunden pro Druckteil. Hierbei lernten wir schnell, lieber etwas mehr Platz für Passungen vorzusehen um diese im nachhinein anzupassen oder auch Passungen vorher einzeln zu Drucken um deren letztendliches Steckverhalten zu testen. Ebenfalls die Konstruktion an sich war oft wesentlich zu Massiv, weshalb wir einen zu schweren Prototypen erhielten.
Unser Prototyp wurde über den Arduino noch an eine Webapplikation angeknüpft, welche wir über den MQTT-Broker der Hochschule steuerten. Darüber konnten wir Daten austauschen und so die Kommunikation der Gefühle und Aktivitäten untereinander gewährleisten.
So manches Kommunikationsproblem verusachte bei uns noch zum Schluss des Semesters einige Probleme.
Die Arbeits -aufteilung und -gewichtung war durch unterschiedliche Vorkenntnisse schwer auszutarieren weshalb sich zu guter Letzt die Vorstellungen von Eggo unter uns unterschieden.








Hinterlasse einen Kommentar