Bachelorarbeiten Produktgestaltung
TRYMO - Stativ mit Motion-Control Funktionen

Das Ziel von TRYMO
Besseres Equipment für angehende Filmemacher
Die Idee hinter TRYMO ist es, angehenden Filmemachern noch nutzerfreundlichere und leicht zugängliche Werkzeuge an die Hand zu geben, um eine höhere Produktionsqualität zu erreichen.
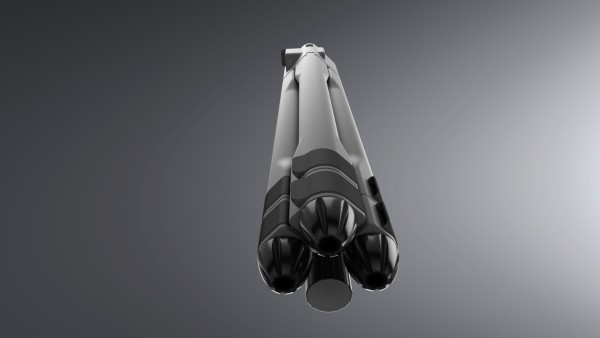
Der TRYMO Pod ist ein kompaktes Kamera-Stativ mit integrierter motorisierter Teleskopstange und einer motorisierten Schwenkachse. Filmemacher benutzen motorisiertes Videoequipment, um präzise, wiederholbare und vorhersehbare Kamerabewegungen ausführen zu können.

TRYMO spricht eine Zielgruppe von ambitionierten Filmemachern an, die ihre Ergebnisse durch den Einsatz von Motion-Control-Equipment auf eine neue Stufe heben möchten. TRYMO ermöglicht durch innovatives Design eine einfachere Handhabung und effizientes Arbeiten.
Das Konzept
Motion-Control einfach integriert
Konventionelle Stative bieten eine Plattform, auf der je nach Anwendungsfall durch separates Motion-Control-Equipment wie z.B. ein motorisierter Slider aufgebaut werden kann, um weiche Kamerabewegungen automatisch auszuführen.
Der TRYMO Pod verbindet das Stativ mit integrierten und vielseitigen Motion-Control-Funktionen. Diese Integration bietet dem Nutzer Zahlreiche Vorteile. Unter Anderem, eine kompakte und leichte Bauweise im Vergleich zu einem einfachen Stativ + Motion-Control-Equipment, ein besonders schneller und einfacher Auf- und Abbau des Stativs, die Substitution einer Vielzahl an spezialisiertem Motion-Control-Equipment durch eine Vielseitige integrierte Lösung.
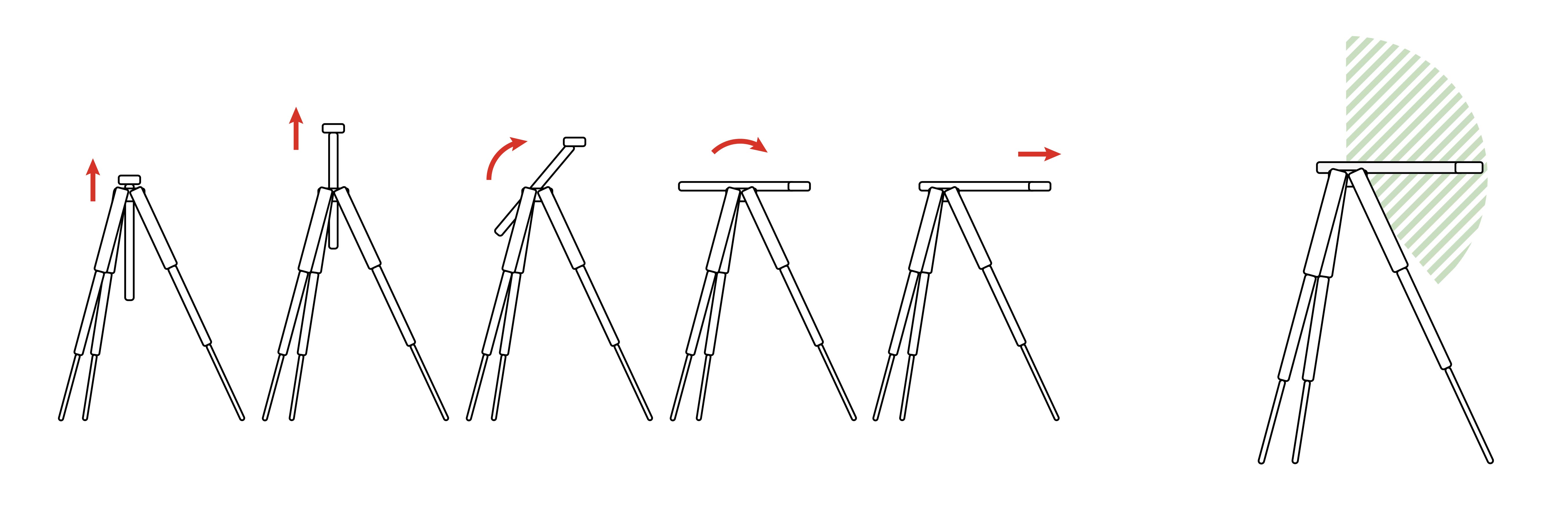
Mein Konzept ist ein Stativ mit einer schwenkbaren, motorisierten Mittelachse. Die Kombination aus Mittelachse und Schwenkgelenk eröffnet dem Nutzer vielseitige Einsatzmöglichkeiten und großen Bewegungsfreiraum, bei gleichzeitig relativ niedriger Komplexität und Kompaktheit.
Die Integration bewirkt, dass der sonst zeitaufwendige Aufbau weniger ins Gewicht fällt, bei gleichzeitig höherer Flexibilität, dank der Schwenkachse.
Es existieren herkömmliche Stative ohne jegliche Motorisierung, welche ebenfalls über eine schwenkbare Mittelachse verfügen. Mein Konzept sieht vor, dass die Mittelachse nicht wie bei vorherigen Lösungen bis zum oberen Anschlag herausgezogen werden muss, um sie schwenken zu können. Die motorisierte Achse ist jederzeit schwenkbar. Da die Achse gleichzeitig ein- und ausfahren, sowie schwenken kann, ergibt sich eine große 2-dimensionale Fläche, auf der die Kamera frei positioniert werden kann.
Der Aufbau
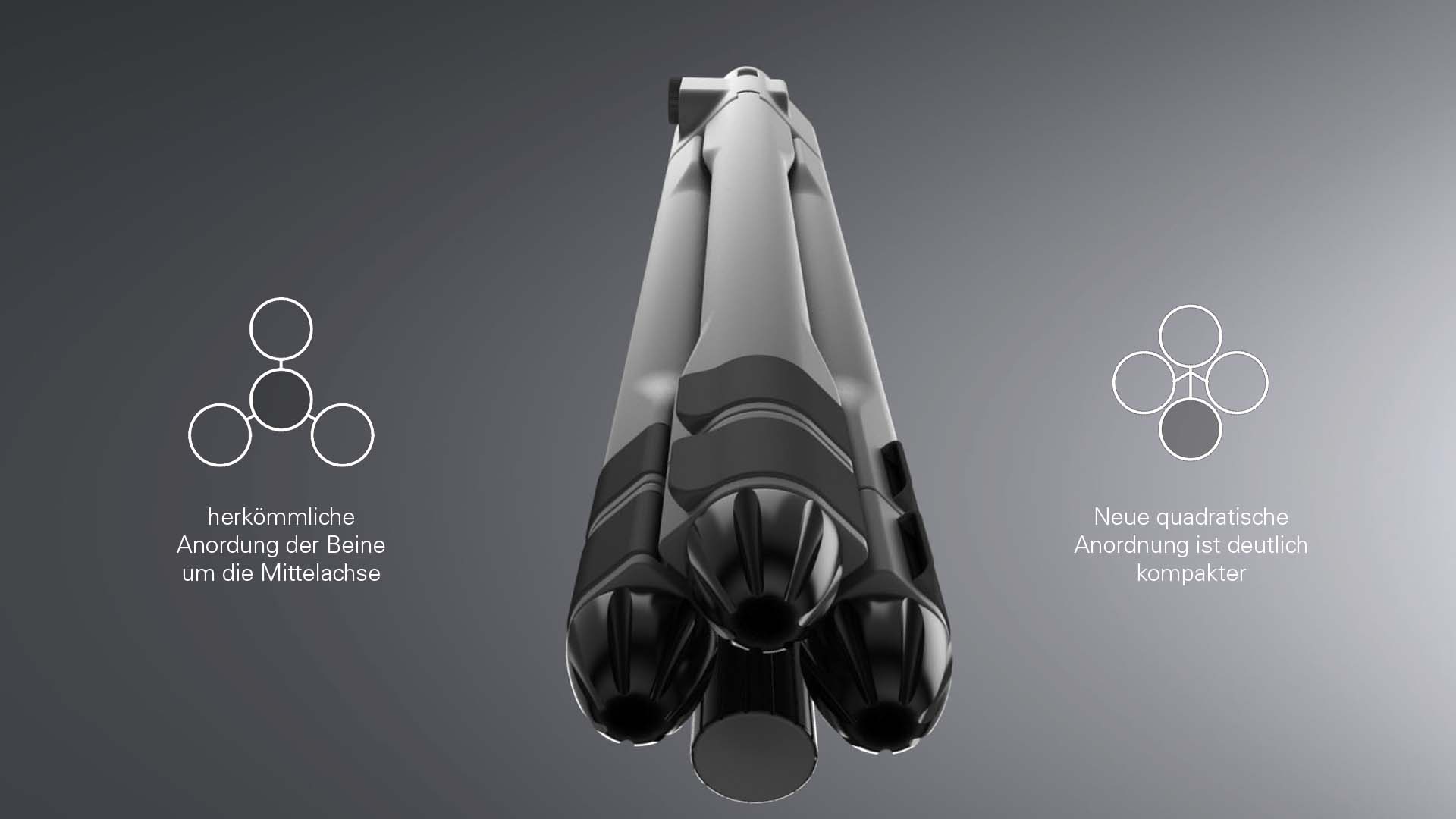
Da das zu entwickelnde Stativ mit einer ausschwenkenden Mittelachse ausgestattet sein soll, muss die Anordnung der Stativbeine neu überdacht werden. Anders verhält es sich mit einer Anordnung, bei der die „Mittelachse“ außerhalb des Mittelpunkts angeordnet ist. Eine solche Anordnung kann entweder weiterhin eine streng radiale Anordnung der Stativbeine beibehalten oder durch Auflösung der geometrisch idealen Form, eine quadratische Formation einnehmen.
Der finale Entwurf
Formale Gestaltung
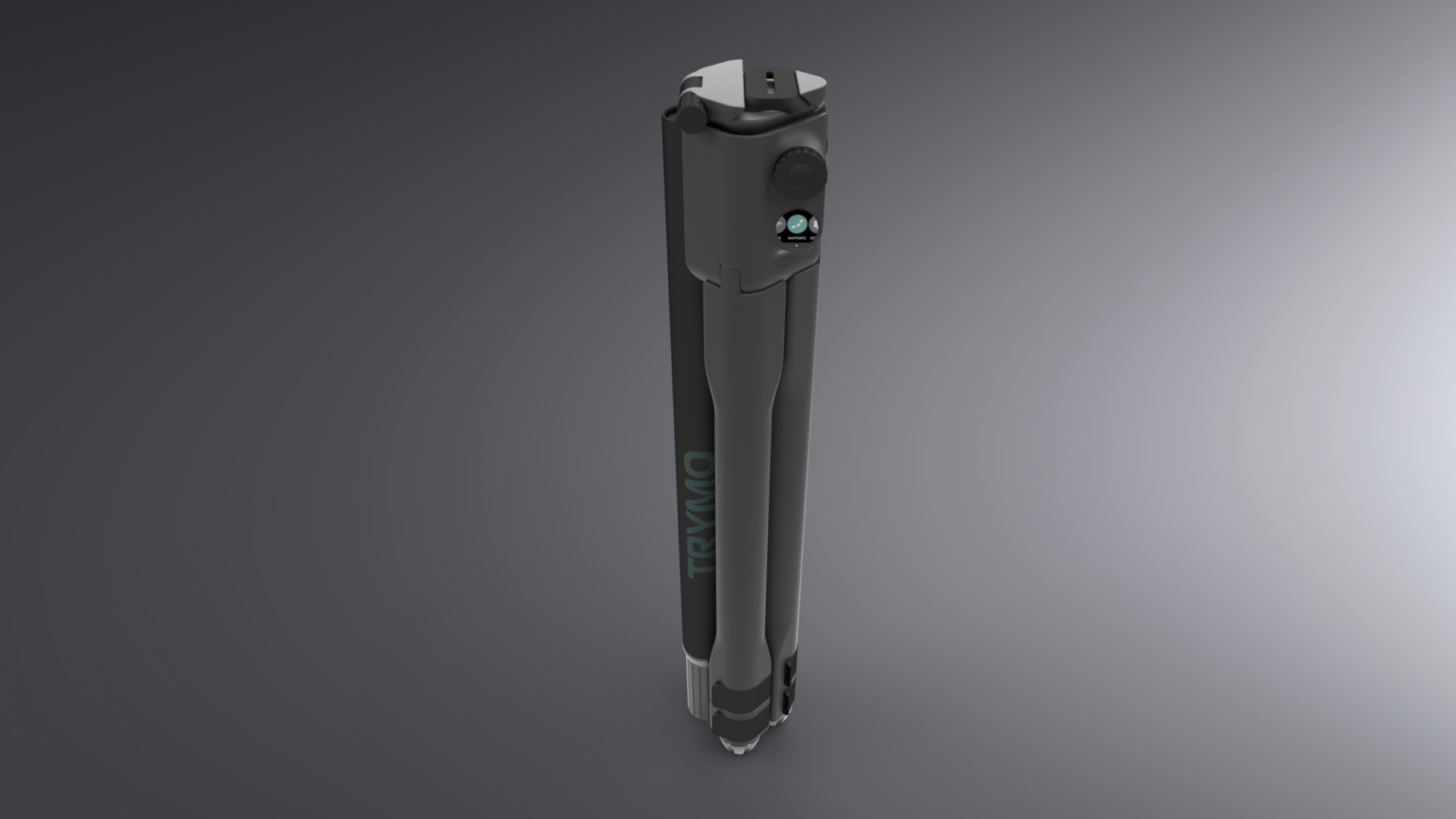
Das Stativ soll in seiner formalästhetischen Gestaltung durch eine klare Formensprache und in seinem Transportzustand als kompakter und geschlossener Volumenkörper erscheinen. Seine geschlossenen Oberflächen brechen bei der Benutzung auf und entfalten sich hin zum funktionalen Zustand.
Der ruhige und saubere Eindruck wird ergänzt durch griffige, texturierte Bedienelemente und konsequent geometrische Formen sowohl in der Gesamtform, als auch in den technischen Details. Gleichzeitig wird darauf geachtet, eine Balance der verwendeten Materialien herzustellen und sie dem jeweiligen Anwendungszweck entsprechend, einzusetzen.
Bedienung
Das Stativ wird wahlweise manuell, mit den Drehreglern, über den im Stativ integrierten Touchscreen oder über die Smartphone App gesteuert.
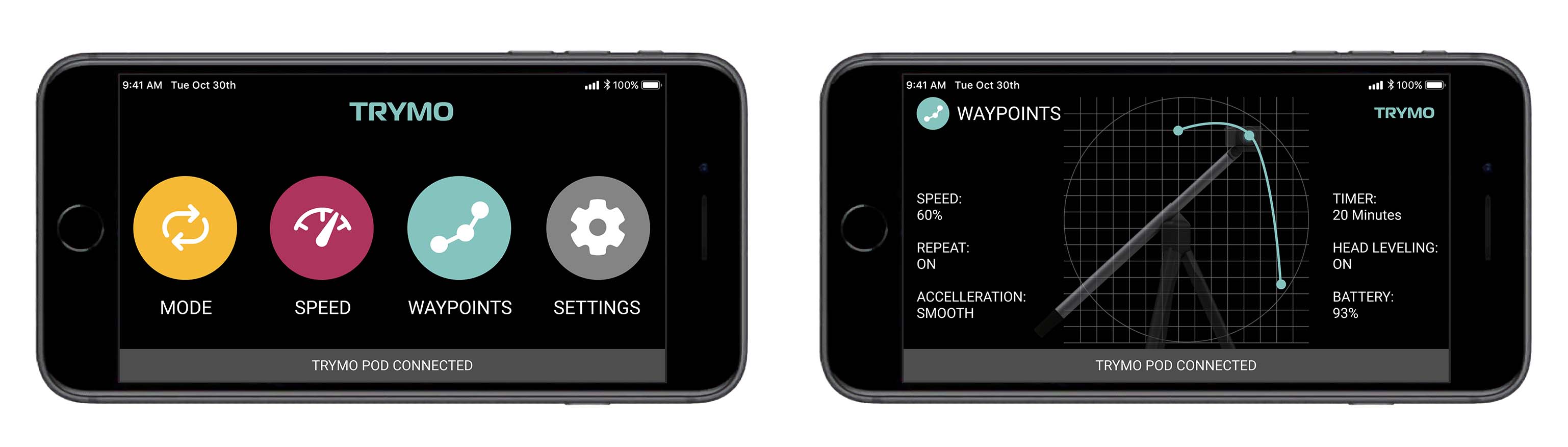
Alle motorisierten Achsen können per Handbetrieb bewegt werden. Die aktuelle Position kann über den runden Touchscreen gespeichert und später wieder aufgerufen werden.
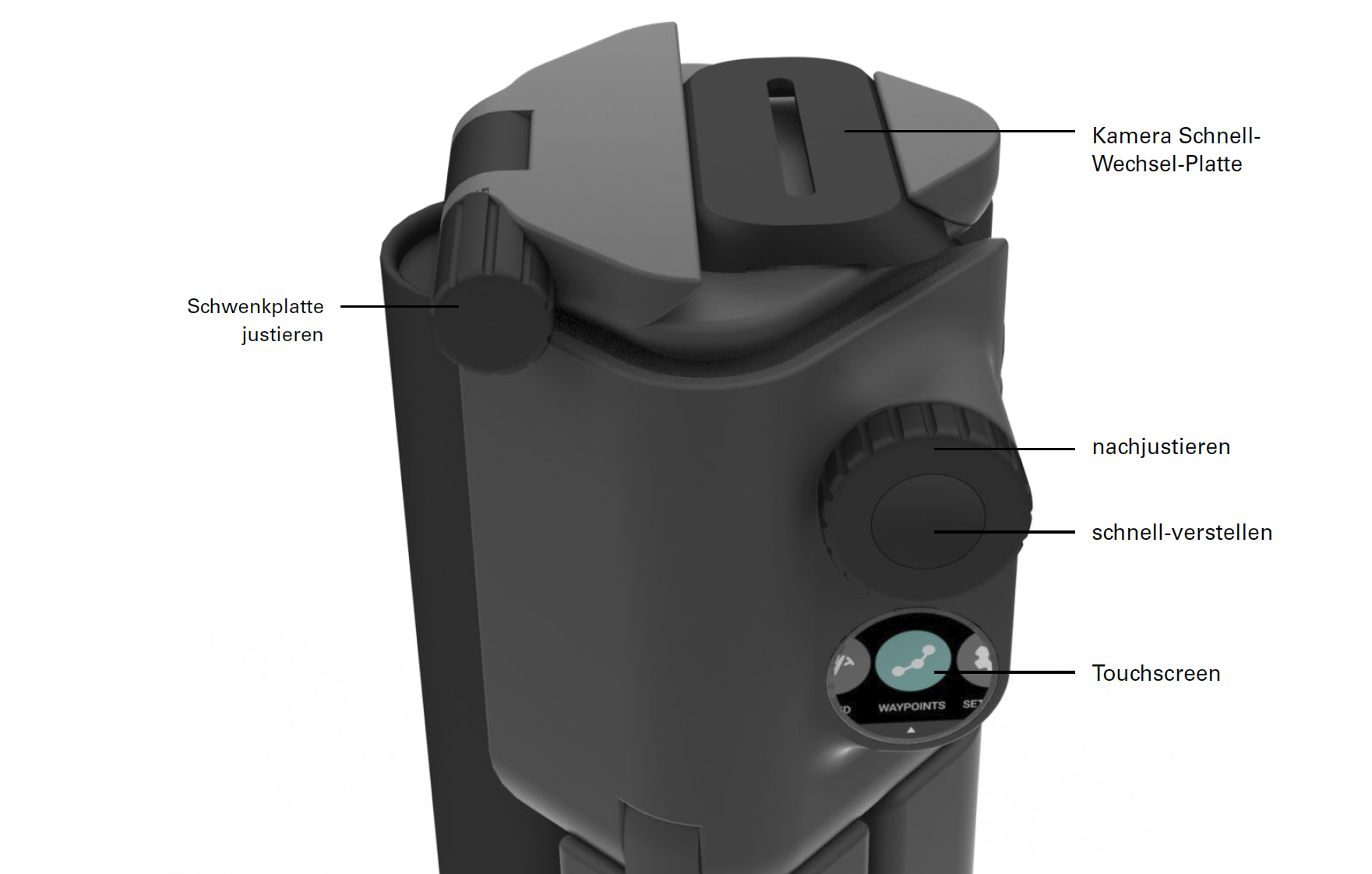
Die Schwenkachse kann durch Drücken und Halten des runden, konkaven Knopfes schnell-verstellt werden. Mit dem äußeren Drehring wird nachjustiert. Zudem sind Parameter wie die Geschwindigkeit, Betriebsmodi, etc. über Wischgesten einfach zu erreichen.
Technik

Der Großteil der Technischen Komponenten ist in dem Mittelstück dem sog. “Technik-Würfel” untergebracht. Diese Komponenten umfassen den Motor und das Getriebe für die Schwenkachse, Li-Ionen-Akkus, Elektronik für die Motorsteuerung, das OS, das runde OLED-Display und die Konnektivität zum Smartphone.
In der Teleskopachse befinden sich zudem ein Motor mit Getriebe und Encoder für den Linearantrieb, sowie ein weiterer
Motor mit Encoder für den Winkelausgleich am oberen Ende der Achse.
Bildergalerie Renderings und Modellbau