Interface Design 1
IBF 4.3

„IBF 4.3“ ist ein Interface zur Bedienung bodengebundener Fahrzeuge. In unserem Nutzungskontext wird es als Bedienoberfläche für ein Erkundungsgefährt der Feuerwehr eingesetzt. Ziel des Designs ist es, eine möglichst hohe Affordanz, gute Ergonomie sowie eine starke Multitasking-Fähigkeit zu gewährleisten, während das Interface zugleich robust und praxistauglich bleibt, und den Anforderungen des harten Einsatzalltags gerecht wird.
Aufgabenstellung

Im Kurs „Interface I“ bestand die Aufgabe darin, einen Controller für ein ferngesteuertes Fahrzeug zu gestalten, das neben den üblichen Richtungsbewegungen zusätzlich mit einem Greifarm ausgestattet ist. Dabei wurde von Beginn an besonderer Wert auf die Nützlichkeit und intuitive Bedienbarkeit des Interfaces gelegt. Ziel war es, am Ende des Kurses mithilfe des Controllers und des Fahrzeugs eine Flasche mit dem Greifarm aufzunehmen, diese durch einen Hindernisparcours zu transportieren und sicher an einem Zielort abzustellen.
Skizzen

Die zentralen Gestaltungskriterien unseres Interfaces waren Ergonomie, Multitasking und intuitive Bedienbarkeit. Die ergonomische Ausrichtung, symbolisiert durch die SZ-Stange als roter Faden, sollte eine freie Nutzung im Sitzen, Stehen oder Gehen ermöglichen. Gleichzeitig musste das System erlauben, Fahrzeug und Greifarm parallel zu steuern. Eine klare Affordanz war entscheidend, damit die Bedienung schnell verständlich ist. Wir entschieden uns früh für eine beidhändige Steuerung, da sie bessere Kontrolle und leichteres Multitasking bietet. Zudem legten wir Wert auf hohe Responsiveness mit stufenlosen Einstellungen, sofortigem Feedback und einer Return-to-Center-Funktion.
Modelle
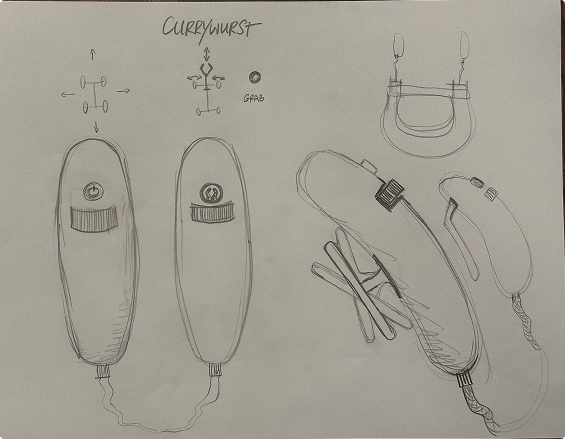
In den ersten beiden Modellen arbeiteten wir mit einer statischen SZ-Stange mit Gashebel rechts und Rückwärtshebel links; weitere Funktionen sollten über die Daumen gesteuert werden. Dabei zeigte sich jedoch, dass das Mapping wenig intuitiv war und die Daumen mit Aufgaben überladen wurden.
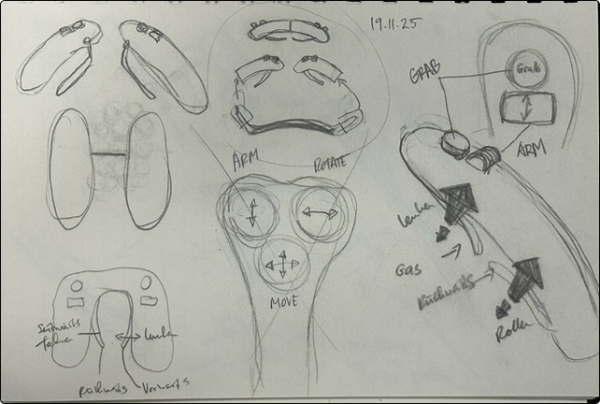
Modell 3 verfolgte daher einen anderen Ansatz: Die Steuerung des Greifarms wurde vollständig auf die Bewegung der Stange gemappt, sodass beide Daumen klar und einfach zugeordnet werden konnten. In der Recherche stellten wir fest, dass eine Stange mit zwei Händen sechs Bewegungsebenen ermöglicht – Vor/Zurück, Rechts/Links, Oben/Unten sowie horizontale Rotation, vertikale Rotation und Torsion –, die wir gezielt für unser Interface nutzbar machen wollten.
Mapping
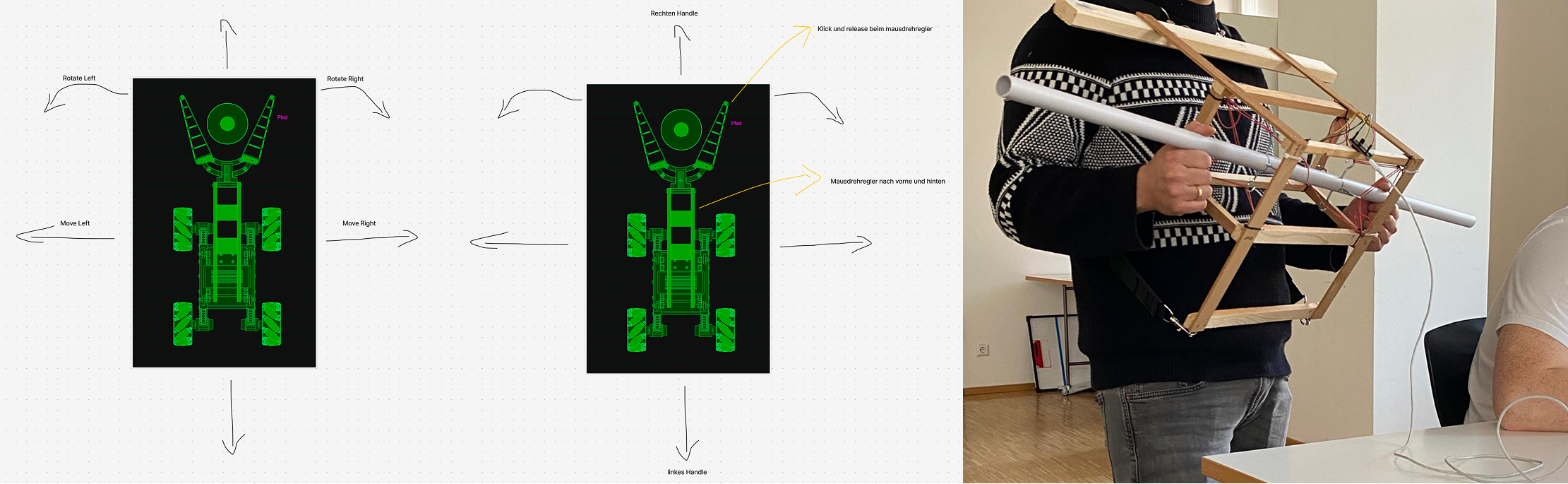
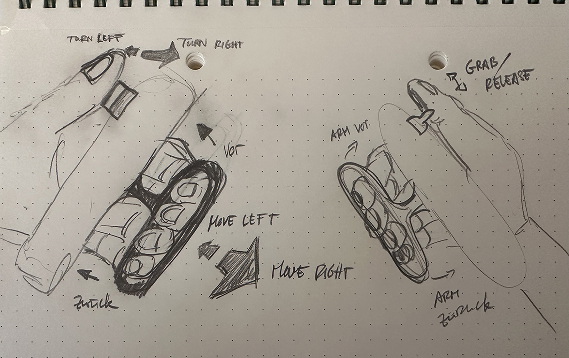
Nach internen Tests entschieden wir uns für folgendes Mapping: Torsion der Stange steuert Vor- und Rückwärtsfahrt, da dies von den meisten intuitiv so ausgeführt wurde. Seitliches Verschieben entspricht dem seitlichen Fahren, was aufgrund des offensichtlichen Mappings eine klare Affordance schafft. Vertikale Rotation dient zum Lenken mit einer dem Autofahren ähnlichen Bewegung, die ebenfalls überwiegend intuitiv gewählt wurde.
Ein Drehregler steuert das Aus- und Einfahren des Greifarms; hier verzichteten wir bewusst auf Selbstzentrierung, um präzise Einstellungen zu ermöglichen. Das Greifen des Hebels löst das Schließen des Greifarms aus, eine Entscheidung die wir wegen dem offensichtlichen Mapping getroffen haben. Ein standardmäßig geschlossener Griff wäre jedoch auch eine Möglichkeit gewesen, um Multitasking zu erleichtern.
Funktionsprototypen
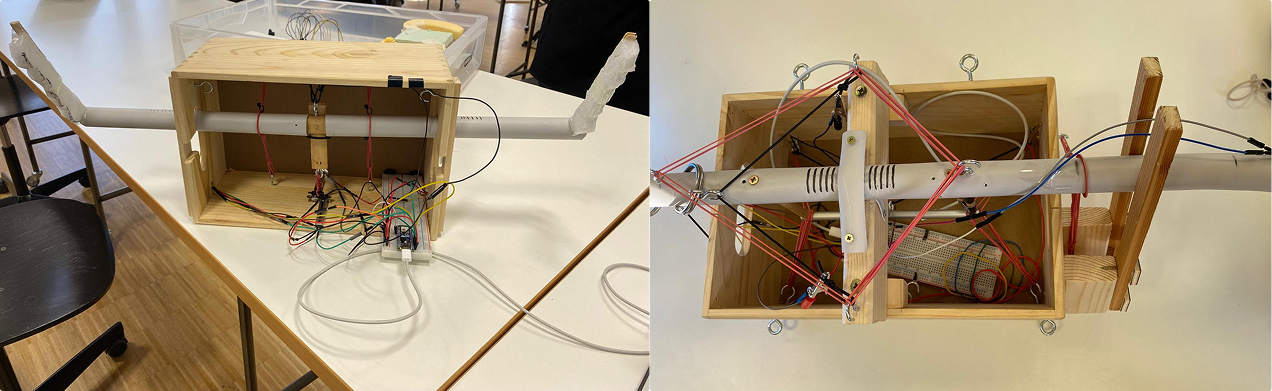
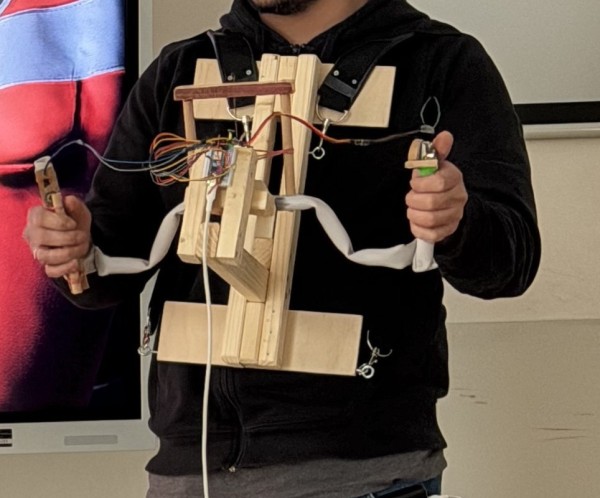
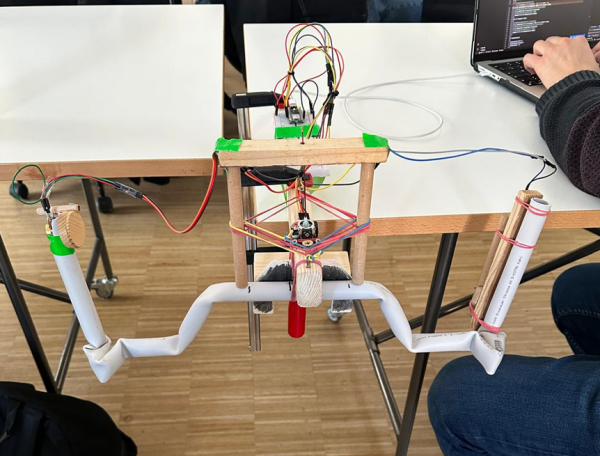
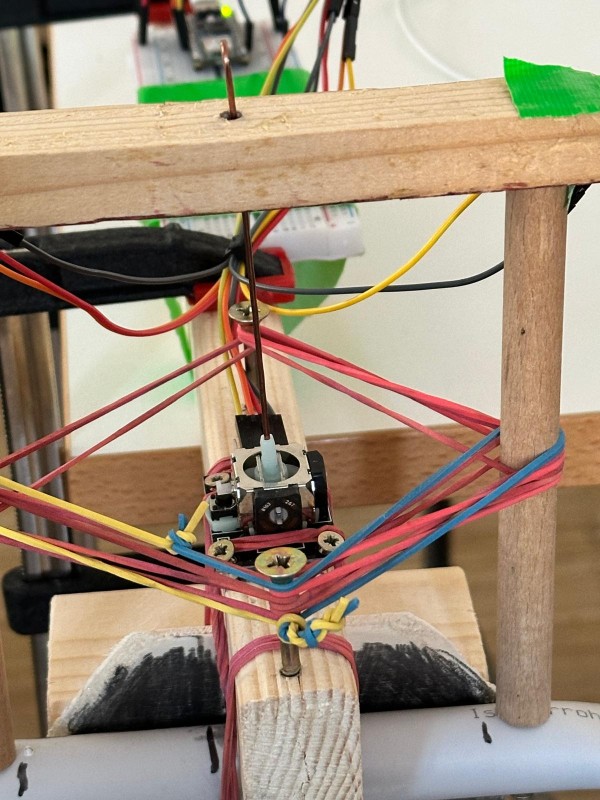
Der erste Prototyp nutzte eine kardanische, mit Gummibändern selbstzentrierende Aufhängung und Schiebepotentiometer zur Erfassung der Bewegungen. In der Praxis erzeugten jedoch Lagerung, Potis und Gummis zu viel Reibung, sodass sich eine große Lücke zwischen Konzept und realer Benutzbarkeit zeigte.
Beim zweiten Prototypen kamen Stretch-Sensoren zum Einsatz. Diese erwiesen sich jedoch als ungeeignet für präzise Steuerung, da sie nur einen sehr kleinen nutzbaren Wertebereich hatten und ihre Messwerte durch Dehnung und Temperatur drifteten. Sie sind aber auch eher als Sensoren mit binärem Output (Stretch? Ja/Nein) gedacht, als für differenzierte Wertausgaben.
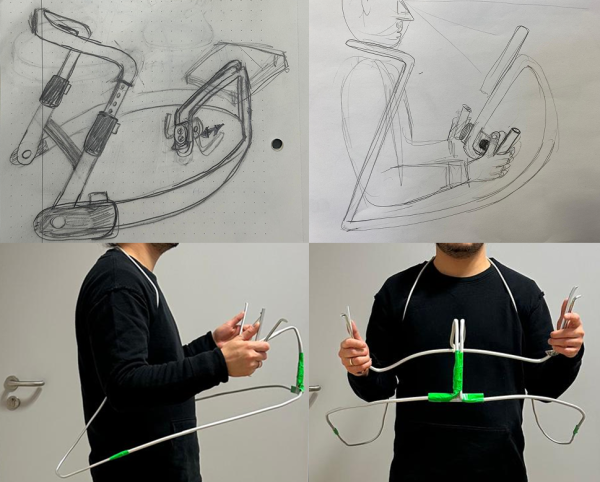
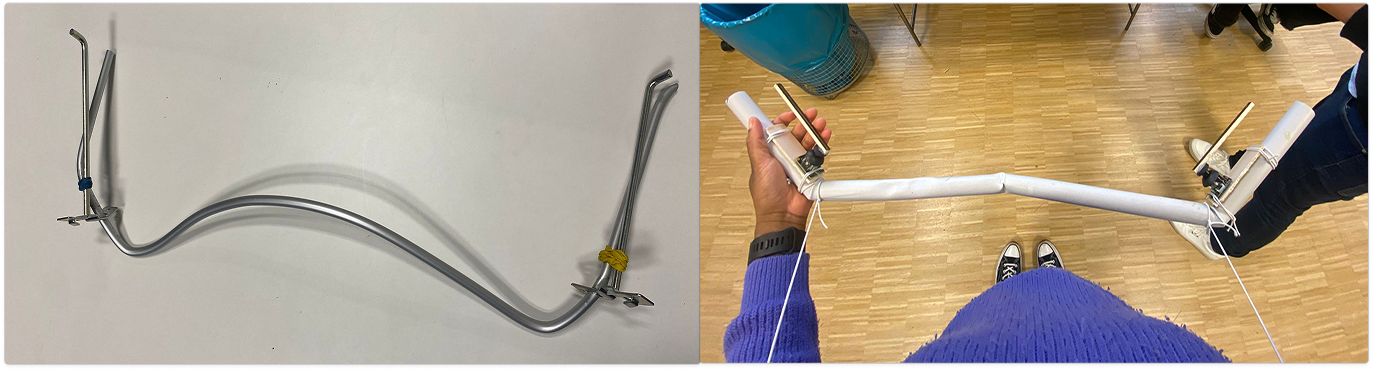
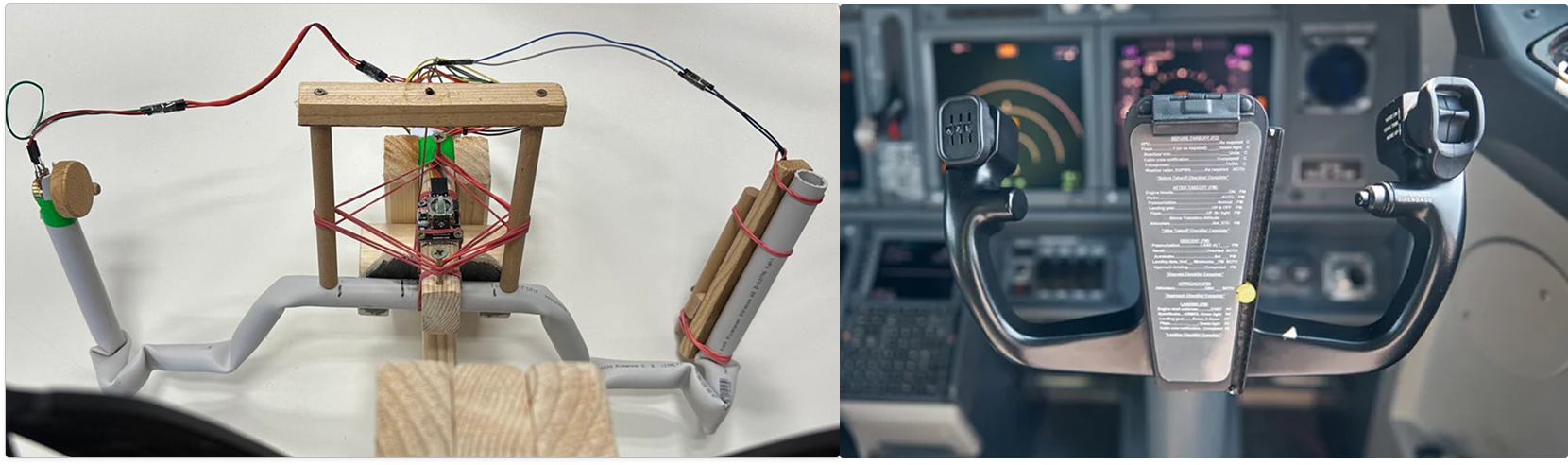
Im dritten Prototypen wurde das Seitwärtsfahren gestrichen, wodurch ein einfacher Joystick eingesetzt werden konnte. Reibungsprobleme blieben, konnten aber mit Graphitschmierung verbessert werden. Gleichzeitig wurde die Stange ergonomisch überarbeitet und entfernte sich von der SZ-Stangen-Idee hin zu einer Form, die stark an ein Flugzeug-Steuerhorn (Boeing Yoke) erinnert. Diese Parallele zu einem bewährten Interface bestärkte das Team darin, dass das Konzept grundsätzlich tragfähig und markttauglich sein könnte.
User -Testings
Die User-Testings haben wir in drei Teile gegliedert:
1. Drittes Modell – Grundgefühl für Halterung und Lenkung
Die Probanden sollten anhand unseres dritten Modells ein Gefühl für die Halterung und die Lenkung entwickeln und dabei idealerweise bereits erkennen, welche Lenkung für welche Steuerung vorgesehen ist.
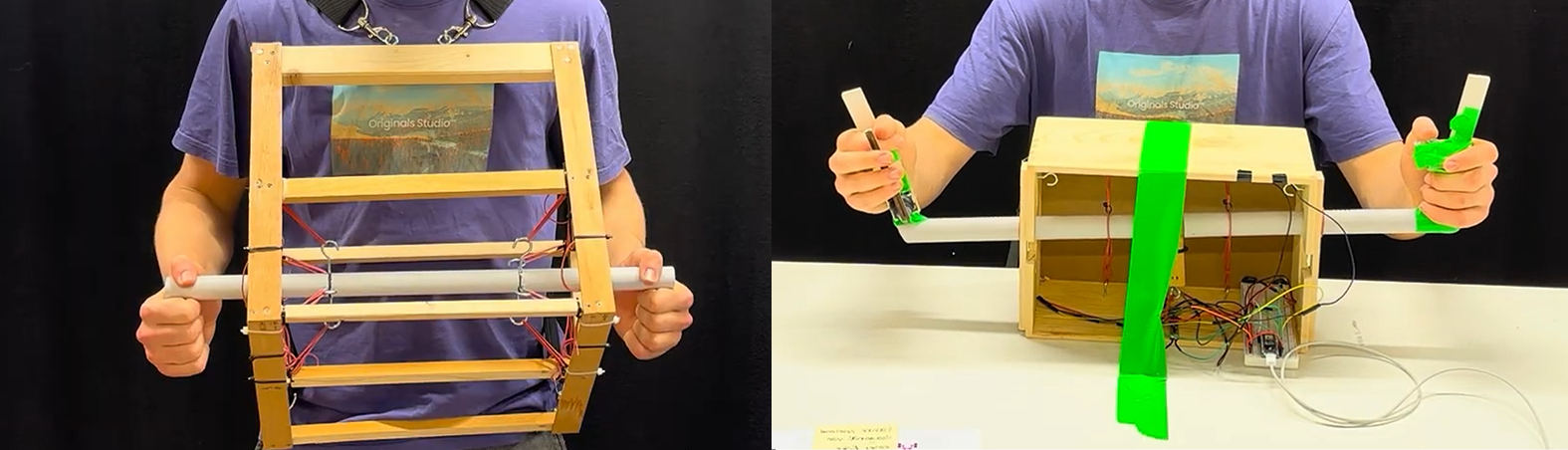
2. Erster Funktionsprototyp – Trockenübung und Simulation
Anschließend sollten sich die Probanden mit dem ersten Funktionsprototypen zunächst „trocken“ an die Lenkung gewöhnen und durften danach mithilfe einer Simulation den Prototypen praktisch testen.
3. Überprüfung der Anwendbarkeit unseres Use Cases
Um die Anwendbarkeit unseres Use Cases zu testen, sollten die Probanden beantworten, ob sich die Gestaltung und Steuerung unseres Controllers für die Nutzung beim Videospielen, bei der Lenkung eines Gabelstaplers in der Logistik und bei der Bedienung eines Baggers in der Baustellenarbeit eignen würde.
Insgesamt war das Feedback der Probanden sehr positiv. Lediglich das Seitwärtsfahren wurde als unnatürlich bemängelt, einer der Gründe diese Funktion später zu streichen. Außerdem äußerten zwei Probanden im dritten Teil des Testings ihre Zweifel über unsere ursprünglichen Nutzungskontexte und kamen zu dem Schluss, dass der Controller für Gabelstapler und große Baumaschinen auf Grund ihrer Komplexität eher weniger geeignet sei. Grund dafür ist, dass unsere Lenkung stärker auf grobe Bewegungen ausgelegt ist und weniger auf präzise Steuerung.
Diese Rückmeldung führte einer Neuausrichtung unserer Use Cases. Nach längerer Überlegung entschieden wir uns für eine neue Anwendung: die Nutzung des Controllers als Scouting Equipment, in Ergänzung zu den bereits präsenten Hilfskräften vor Ort, beispielsweise bei der Feuerwehr/THW/Polizei.
Neue Nutzungskontexte
Kriterien für neue Nutzungskontexte waren Orte, an denen ein großes, robustes und kostspieliges Interface sinnvoll ist – insbesondere Industrie und kritische Infrastruktur. Es sollte schnell erlernbar sein, hohe Nutzerfluktuation verkraften und mobil einsetzbar sein.
Aufgrund der Bedienbeschränkungen auf Daumen und Zeigefinger eignet sich das Interface eher für überschaubare Aufgaben statt für komplexe Maschinen.
Daraus leiteten wir konkrete Use Cases ab: Scouting wenn Gefahr für Leib und Leben besteht (Feuerwehr, Polizei, THW), Lagerwirtschaft mit mobilen Greifrobotern, Landwirtschaft in räumlich engen Bereichen wie Weinbau oder Gewächshäusern, und im Katastrophenschutz für ferngesteuerte Erkundungsroboter. Weitere potenzielle Einsatzfelder sind Forstwirtschaft, Wachschutz oder kommunale Dienste, konzentriert haben wir uns jedoch auf die ersten drei Szenarien.
Unser Interface
Geschirr:
Das Interface ist als robuster Rucksack konzipiert, der bekannt, verständlich und anpassungsfähig ist. Die Höhe lässt sich einhändig über einen Schraubknopf verstellen, um schnelle Anpassungen zu ermöglichen.
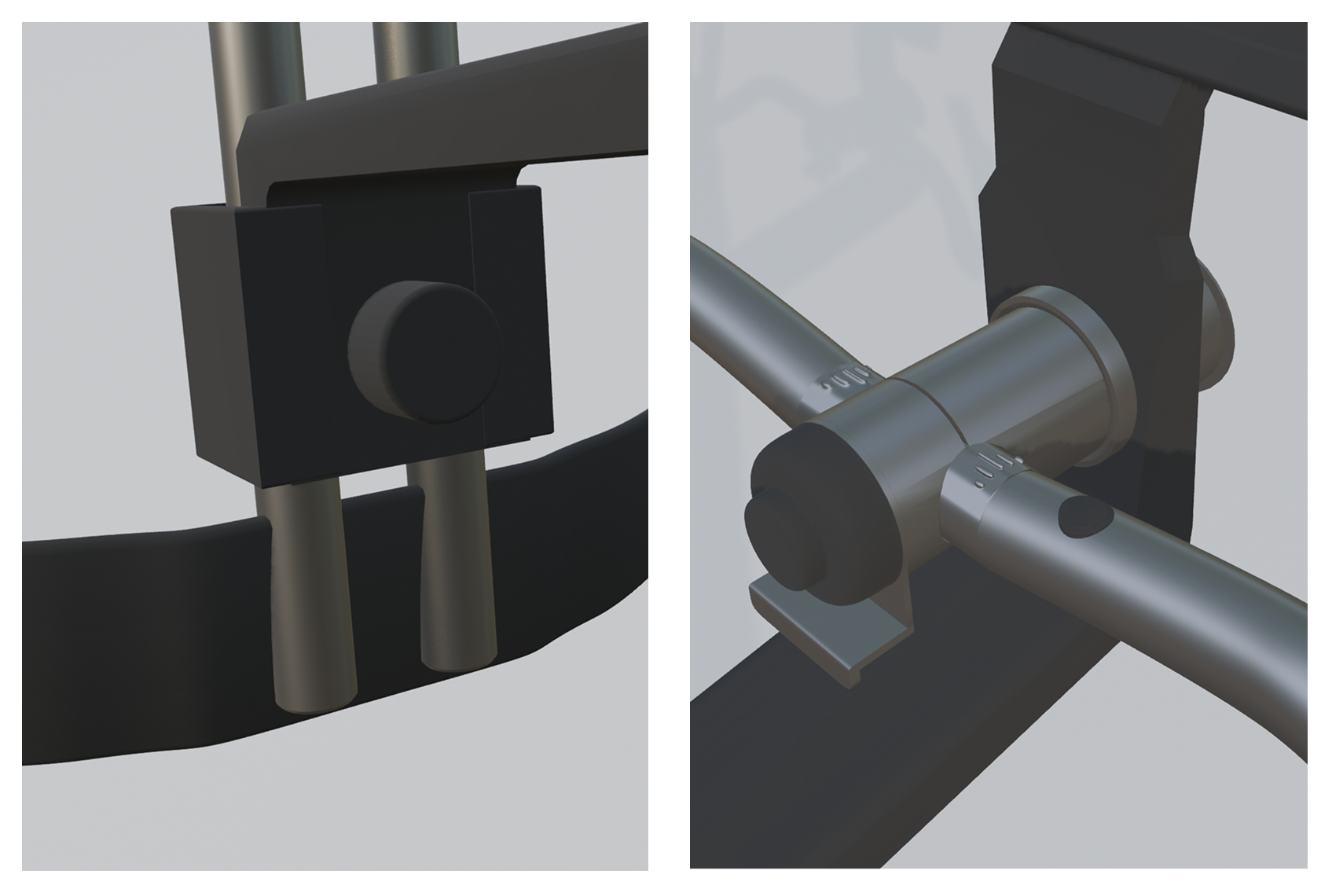
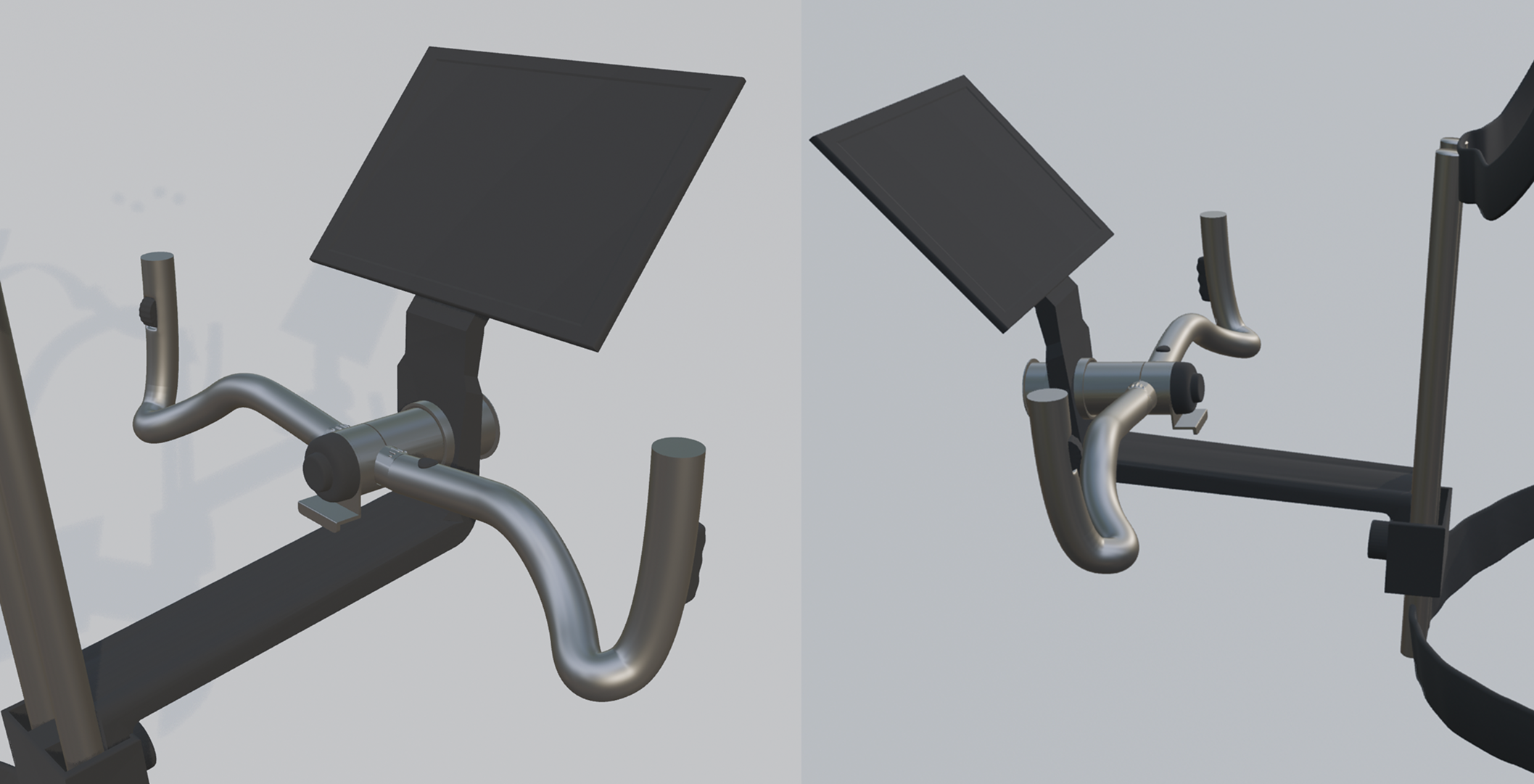
Lenkstange:
Die Lenkstange nutzt ein kulturell vertrautes Steuerkonzept: Der Zylinder signalisiert durch seine Form die Drehbewegung, die Richtung ist intuitiv erfassbar. Die Tiefenverstellung erfolgt über einen Druckknopf mit Griffplatte, die Skala auf der Stange dient als Signifier für die Torsionsfunktion. Der An-/Aus-Knopf ist bewusst außerhalb des Lenkbereichs platziert.
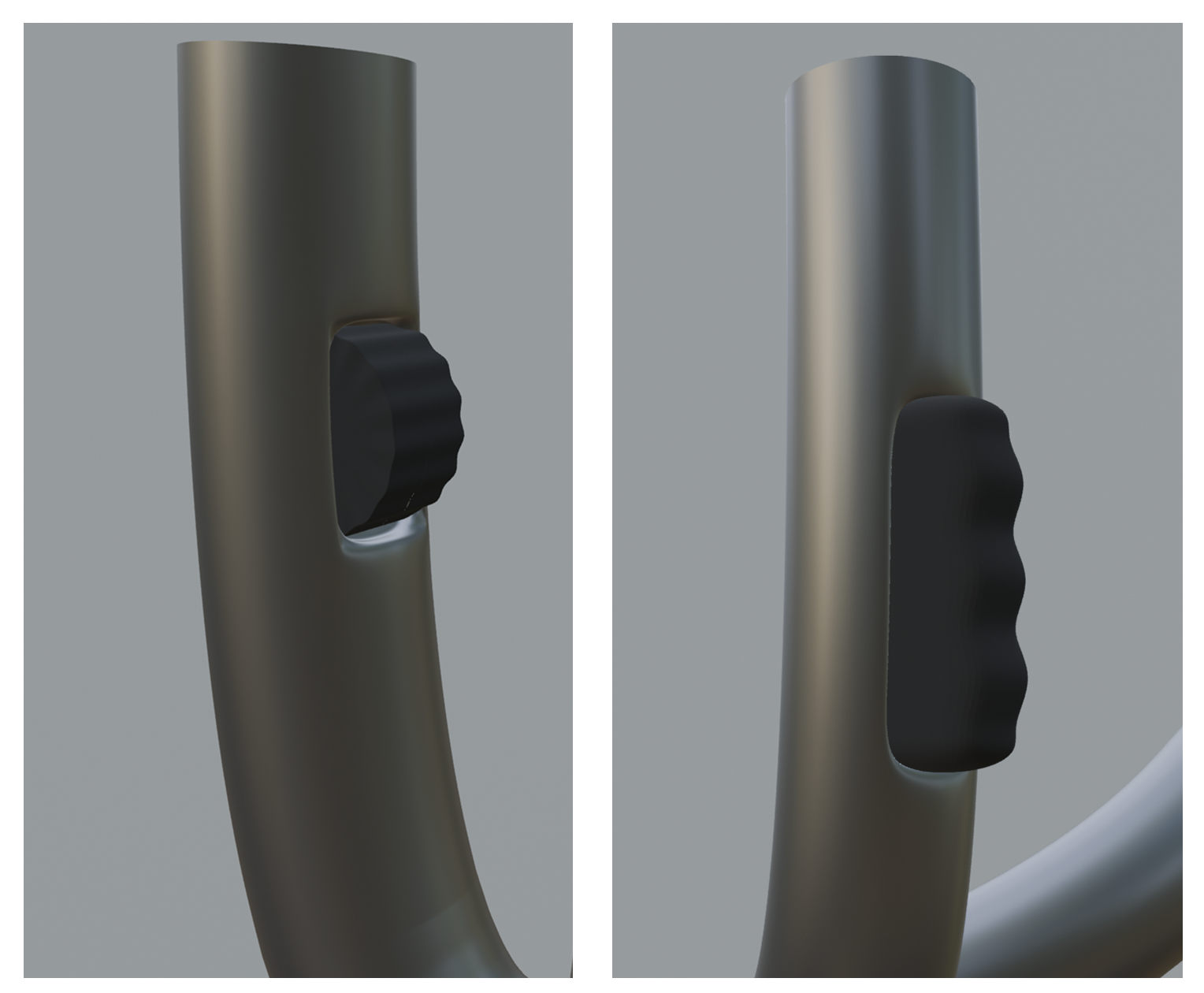
Armsteuerung:
Ein Drehregler ermöglicht stufenlose Einstellungen zwischen definierten Anschlagpunkten, sodass der Arm innerhalb einer Daumenbewegung präzise positioniert werden kann. Das Material ist texturiertes Hartplastik für haptisches Feedback.
Greifersteuerung:
Der Greifer wird über einen großflächigen Druckknopf gesteuert, der graduelles Greifen erlaubt. Ein abstehender Hebel wurde vermieden, um Verriegelungsprobleme, besonders mit Handschuhen, zu verhindern.
Theodor Hoenig, Grace Mbuta, Jonas Geiger
BetreuungProf. Michael Schuster, Anna Raveling
Tags