In der Bachelor-Arbeit im 7. Semester bearbeiten die Studierenden – meist in Gruppen – anhand eines frei wählbaren Themas ein Gestaltungsprojekt, in dem sie ihre erlernten Kenntnisse in Recherche, Konzept und Entwurf praktisch anwenden.
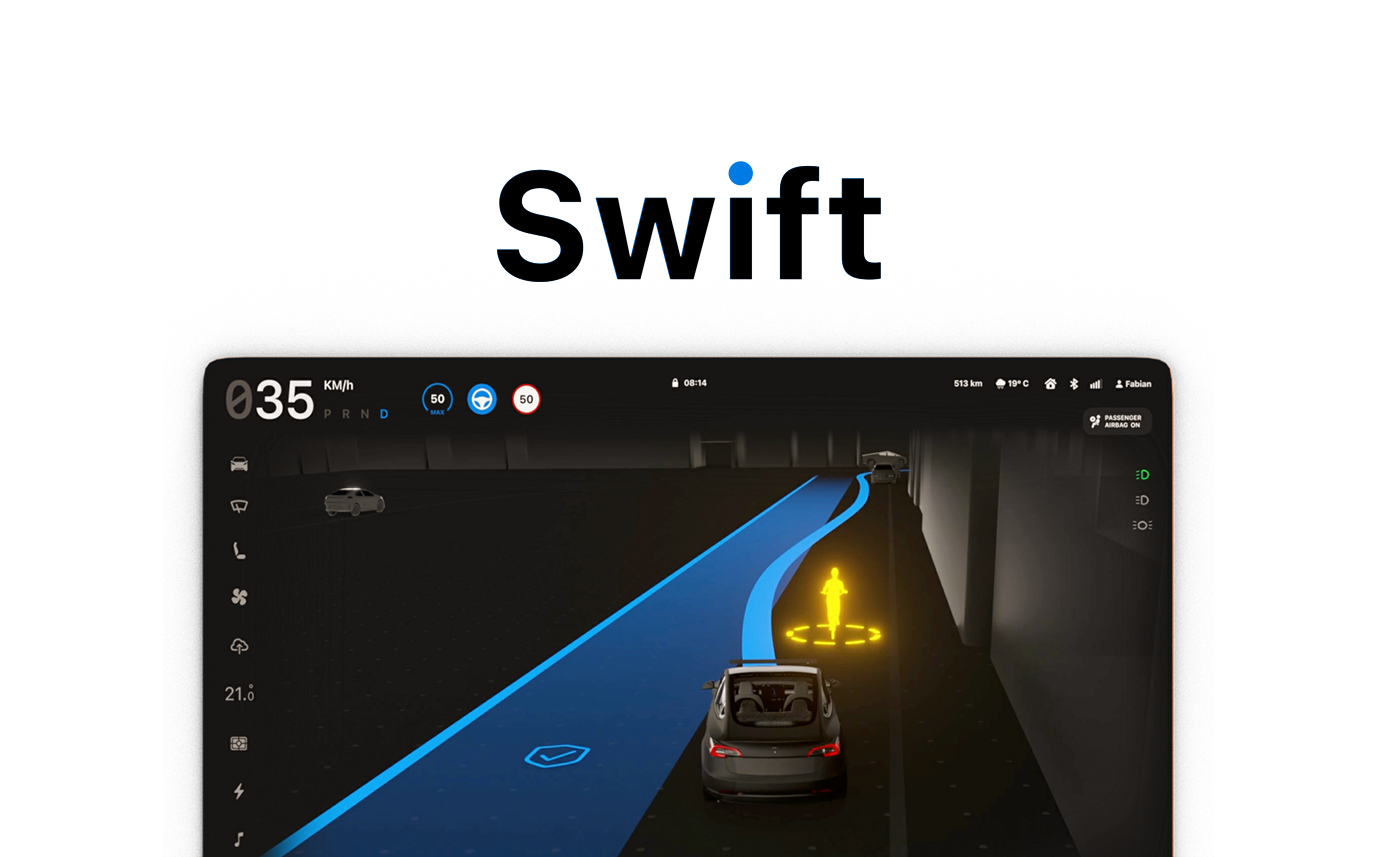
Swift - Adaptives Dashboard für teilautomome Fahrzeuge
Heutzutage ist das Verhalten teilautonomer Fahrzeuge für ihre Fahrer:innen nicht immer nachvollziehbar. Das Fahrzeug handelt oftmals unbegründet und verunsichert damit seine Passagier:innen. Dadurch entstehen Gefahrensituationen und den Nutzer:innen wird somit die Motivation genommen, die Fahrassistenz-Systeme zu verwenden. Wir tragen mit Swift dazu bei, das Verhalten teilautonomer Fahrzeuge nachvollziehbar zu gestalten, um damit das Vertrauen der Fahrer:innen in die Fahrassistenz-Systeme zu steigern. Swift erhöht dadurch die Sicherheit im Straßenverkehr.
Onboarding
Der Onboarding Screen symbolisiert den Einstieg in die Anwendung und markiert den Start in das System. Er ist der erste Screen, der den Fahrer:innen angezeigt wird, sobald diese platz nehmen. Auf diesem werden den Fahrer:innen anhand ihres Nutzungsverhaltens Vorschläge angeboten, welche diese annehmen oder ablehnen können.
Usecase Onboarding
Objekterkennung
Die Objekterkennung ist das Unfallvermeidungssystem der Anwendung. Es meldet den Nutzer:innen vorausschauend, sobald sich unerwartete Objekte auf der Fahrbahn befinden. Erkennt das System ein Hindernis, so reagiert es eigenständig und ohne Einwirken der Fahrer:innen. Dieser Vorgang wird visuell auf dem Display angezeigt und gestaltet dadurch die Vorgänge nachvollziehbar.
Usecase Objekterkennung
Intervention
Im Intervention-Modus fordert das Fahrzeug die Fahrer:innen aktiv auf, mit vordefinierten Auswahlmöglichkeiten direkt Einfluss auf die Fahrweise des Autopiloten zu nehmen. So können beispielsweise Überholmanöver sicher durchgeführt oder auf menschliche Gesten an Fußgängerüberwegen reagiert werden.
Usecase Intervention
Autopilot-Feed
Die Fahrzeugdaten anderer Fahrzeuge sind anhand einer Cloud für das eigene Fahrzeug zugänglich. Anhand diesen wird errechnet, welche Strecken das Fahrzeug autonom fahren kann. Im Autopilot-Feed wird den Fahrer:innen die Wahrscheinlichkeit angezeigt, bei welchen Streckenabschnitten diese eingreifen müssen. Hier werden außerdem geplante Aktionen angezeigt.
Usecase Autopilot-Feed
Teaching
Im Fahrlehrer-Modus bekommen die Fahrer:innen die Gelegenheit, dem Fahrzeug einzelne Streckenabschnitte anzutrainieren. Hier werden alle relevanten Daten aufgezeichnet und ebenfalls zur Verbesserung des Systems genutzt.
Usecase Fahrlehrermodus
Notifications
Ungeplante Aktionen, zum Beispiel Notbremsungen oder Lenkmanöver, werden während der Fahrt kommuniziert und angezeigt. Über diese Notifications können die Fahrer:innen ebenfalls in das Logbuch gelangen.
Usecase Notifications
Logbuch
Die Fahrer:innen haben die Möglichkeit, im Logbuch vergangene Aktionen zu überprüfen und Feedback über das Fahrverhalten der Assistenz zu geben. Dieses wird anderen teilautonomen Fahrzeugen über die Cloud zugänglich gemacht, wodurch das Fahrverhalten der gesamten Flotte verbessert wird.