Der Kurs bietet eine Einführung in Arduino, Elektronik, Programmierung und den kreativen Umgang mit Technologie. Die Studierenden lernen mitunter Arduino-Projekte umzusetzen und eigene Ideen zu entwickeln.
Unser Projekt ist ein Farhrzeug das Automatisch einer Infrarotlichtquelle folgt.
Es wurde mit Arduino gebaut und programmiert.
Themenfindung
Unsere Idee war es ein Fahrzeug zu bauen das einem Wekzeuge bringen kann.
Material
2 Fahrzeugmotoren mit Rädern
2 Ultraschallsensoren
2 Infrarotsensoren
1 Mini Breadboard
1 Motorsteuerung
1 Arduino Uno
1 9V Batterie
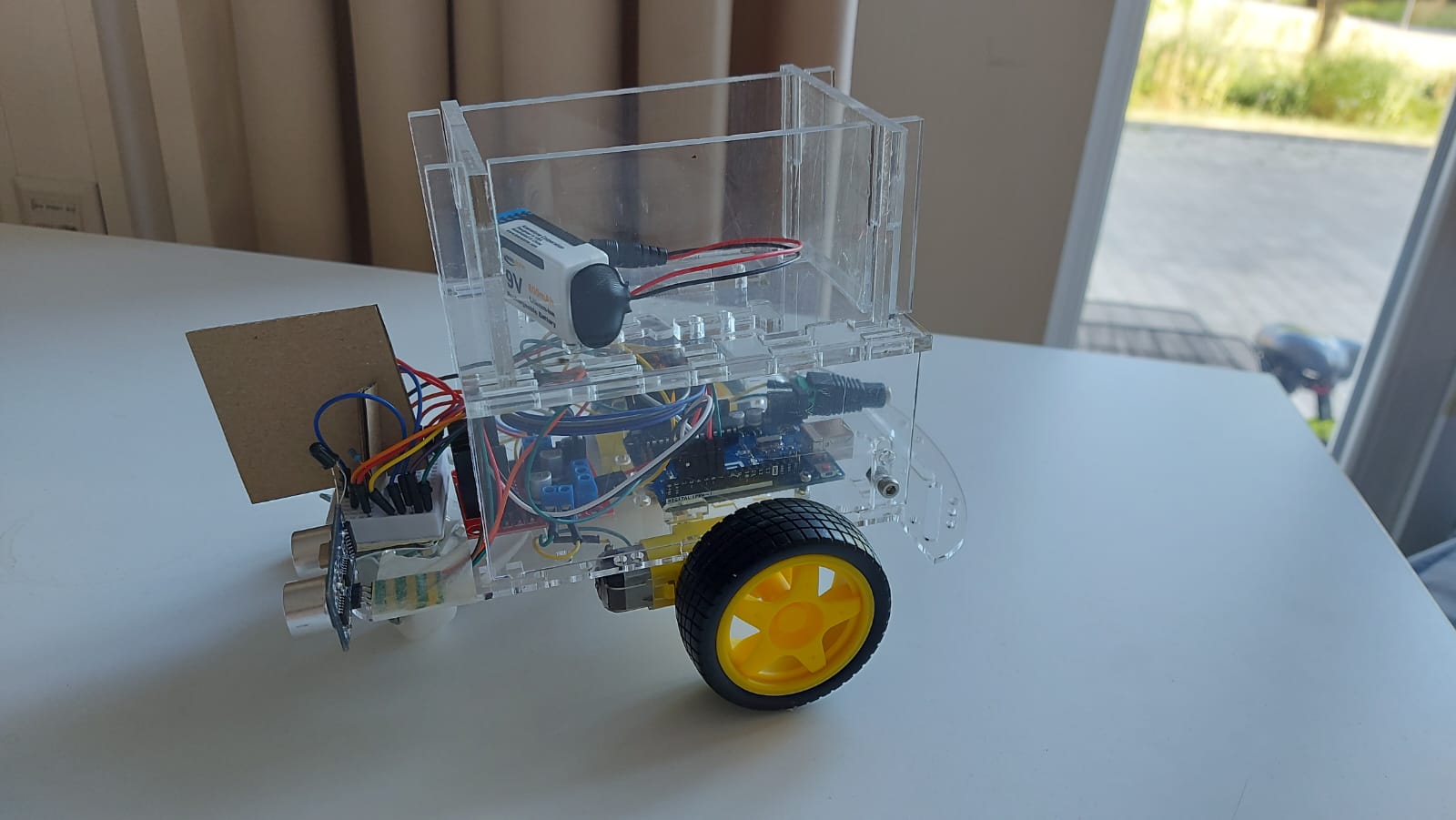
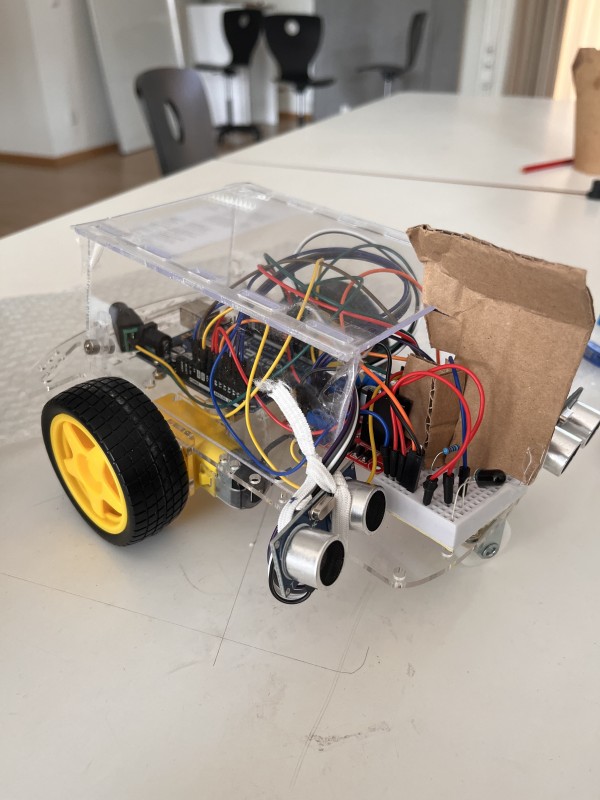
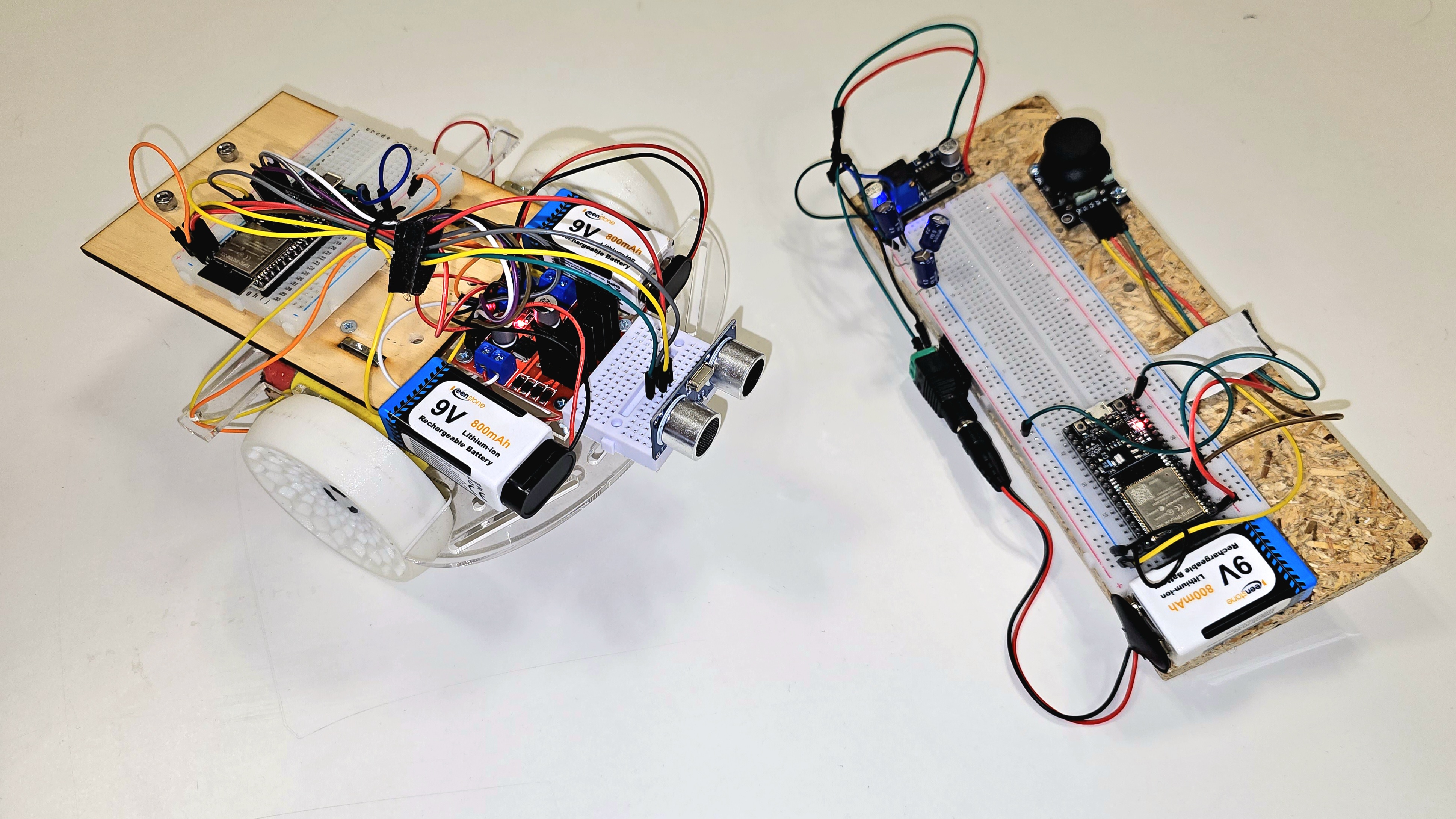
Aufbau
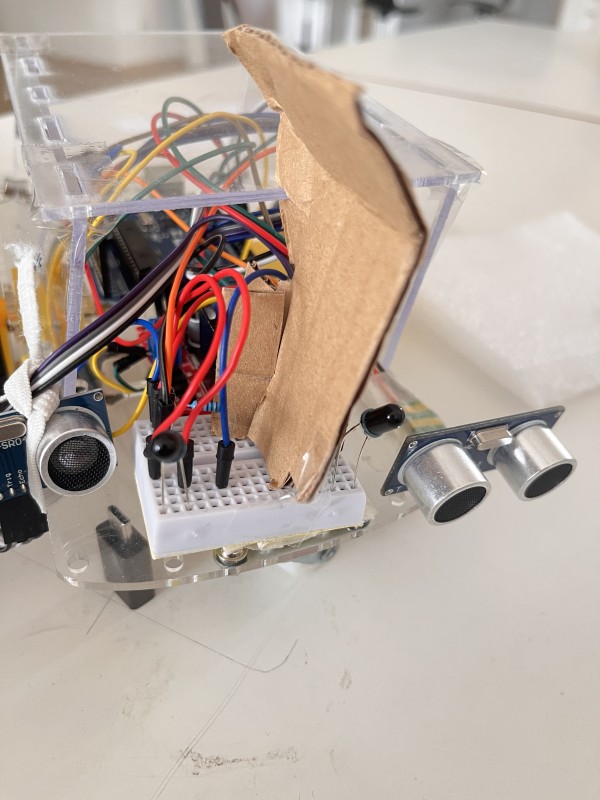
Der Roboter verfügt über zwei Infrarotlicht Sensoren welche das Navigieren. Eine Trennwand in der Mitte erleihtert es für das Fahrzeug zu unterscheiden ob das Licht von links oder rechts kommt.
Des weiteren ist der Roboter mit zwei Ultraschall Sensoren ausgestattet um Hindernisse zu Registrieren. Um seinem Zweck gerecht zu werden ist oben auf dem Roboter ein Korb Montiert.
Funtionsweise
Der Roboter fährt los wenn Infrarotlicht wahrgenommen wird und folgt diesem. Wenn kein Infrarot licht mehr wahrgenommen wird oder die Ultraschallsensoren ein Hindernis wahrnehmen wird der Roboter gestoppt.
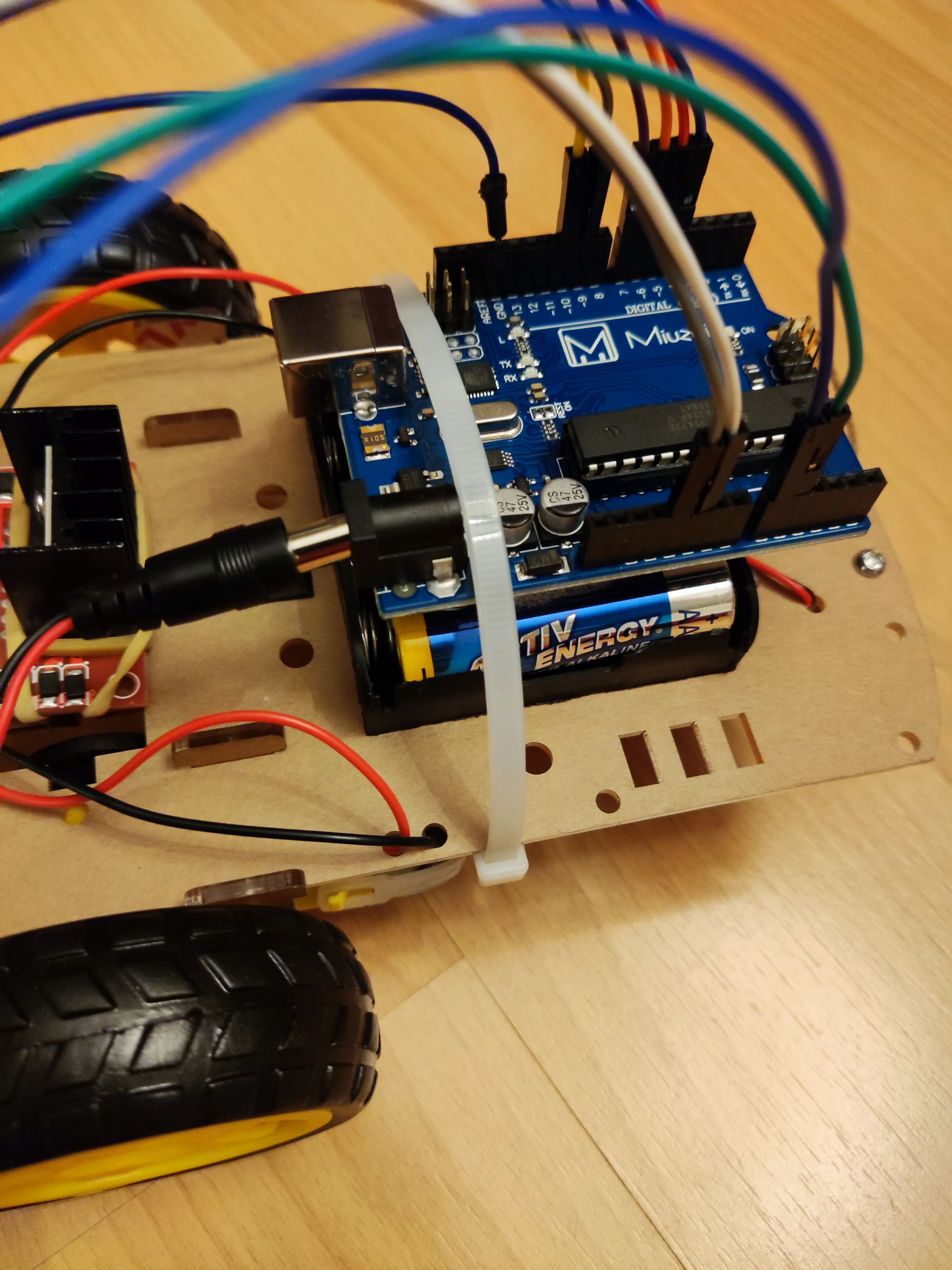
Prozess
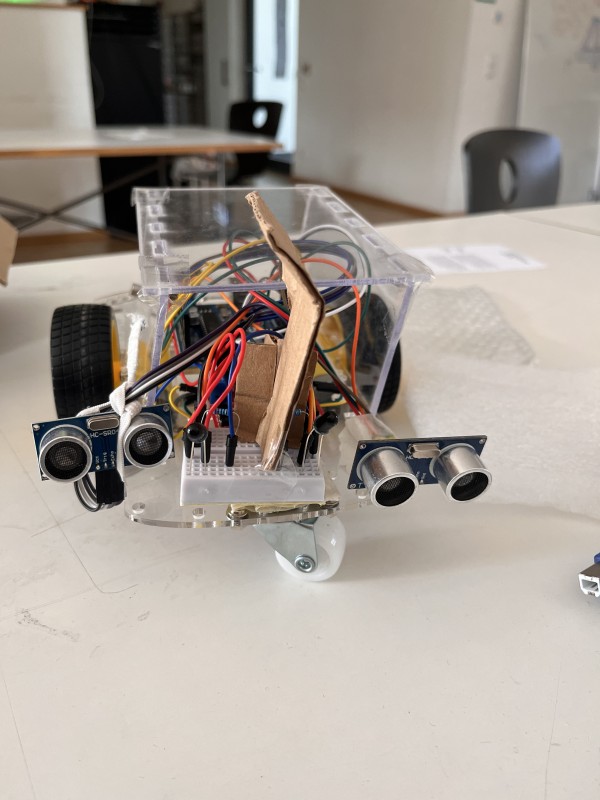
Wir hatten uns bereits ein Fahrzeug Gestell und haben zunächst versucht die Motoren der Räder anzusteuern. Danach haben wir uns an den Ultraschallsensor gewagt, wir haben gemerkt dass der Ultraschallsensor einen zu kleinen Radius nach links und rechts hat um Objekte zu erkennen. Daraufhin haben wir uns entschieden einen zweiten Ultraschallsensor anzubauen und hatten für jede Seite einen Sensor.
Zuerst haben wir versucht dass der Roboter einer Person nur mit einem Ultraschallsensor folgt. Wir haben jedoch schnell gemerkt dass dieser nicht nur Personen erkennt sondern auch Objekte erkennt und auf diese zusteuert. Wir haben uns dann zum Schluss für das einbauen der Infrarotdioden entschieden damit mit einer Infrarotlampe nur einer bestimmten Person gefolgt werden kann, hier haben wir uns auch wieder für zwei Stück entschieden sodass jede Seite eine Diode erhält. So kann der Roboter rechts und links unterscheiden und besser auf die Person zusteuern.