Der Kurs bietet eine Einführung in Arduino, Elektronik, Programmierung und den kreativen Umgang mit Technologie. Die Studierenden lernen mitunter Arduino-Projekte umzusetzen und eigene Ideen zu entwickeln.
Das Projekt durfte von uns Studenten selbst gewählt werden.
Die einzige Vorgabe bestand darin, die Arduino IDE zu nutzen. Außerdem sollten Sensoren verwendet werden.
Themenfindung:
Als Inspiration diente ein ferngesteuertes Auto mit dem Fahrkonzept eines Rasenroboters.
Material:
2 x ESP32
1 x Ultraschallsensor
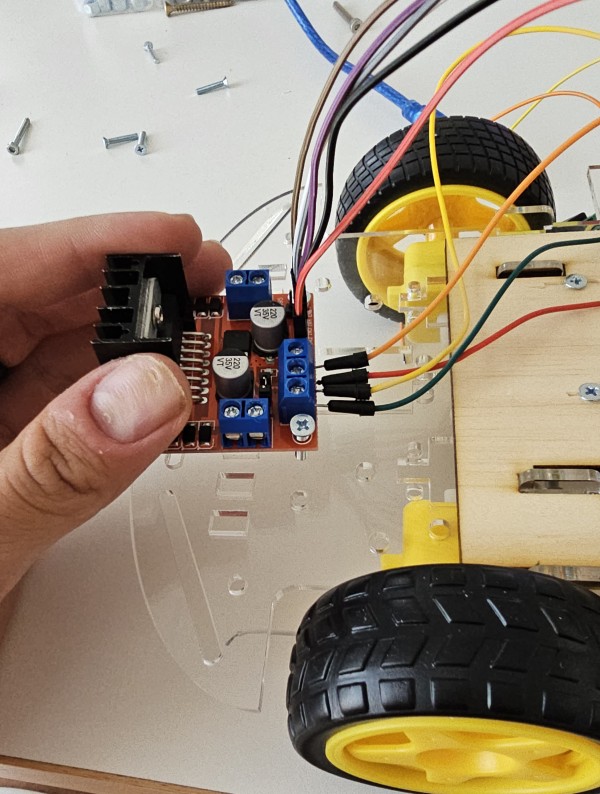
1 x H-Brücke
1 x Spannungswandler
2 x 5V Motoren
3 x 9V Batterien
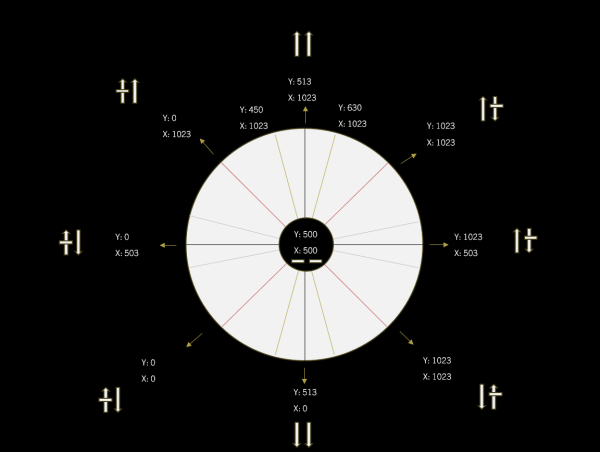
1 x Joystick
Kabel, Breadboards, Kondensatoren, Holz
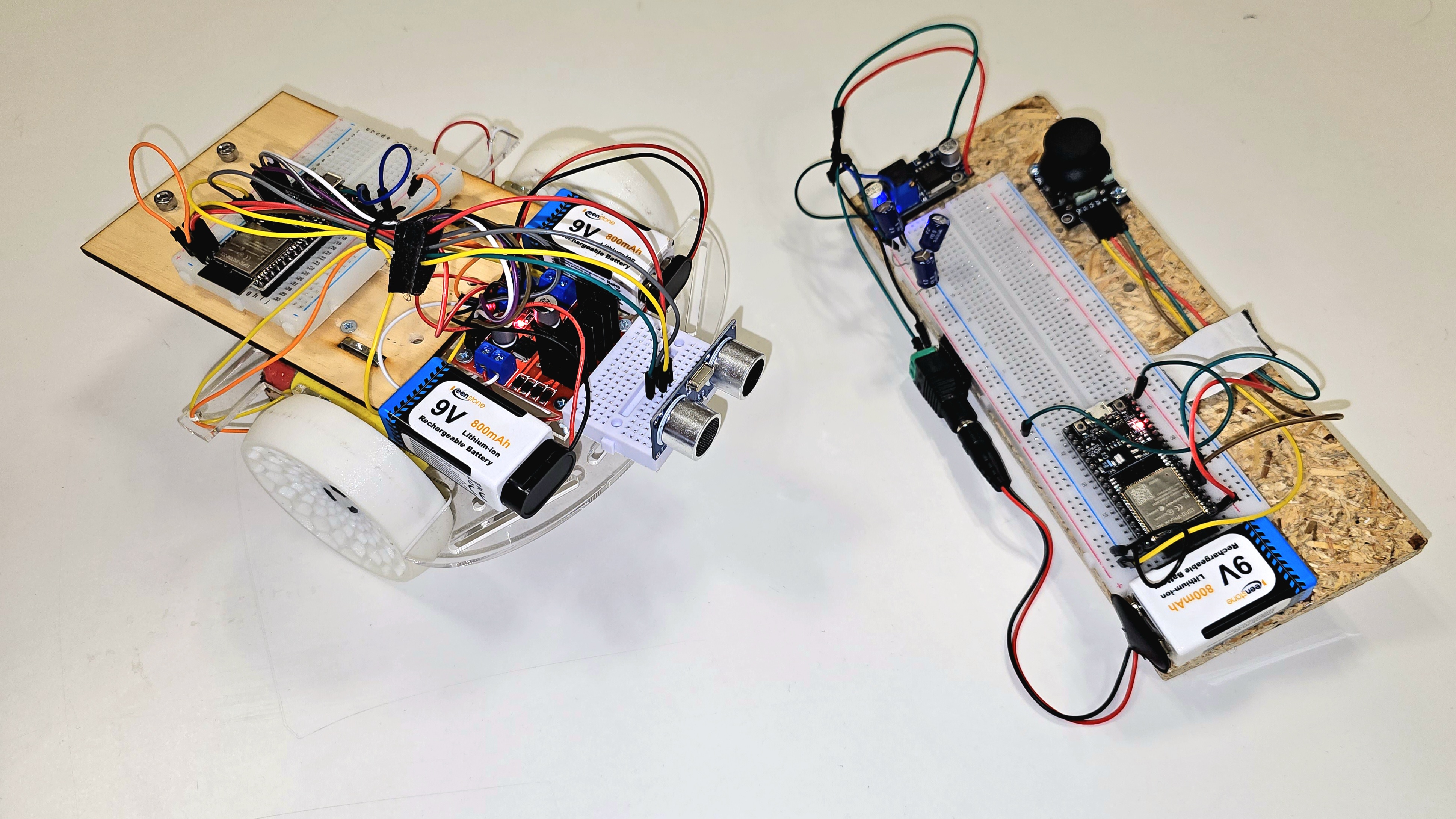
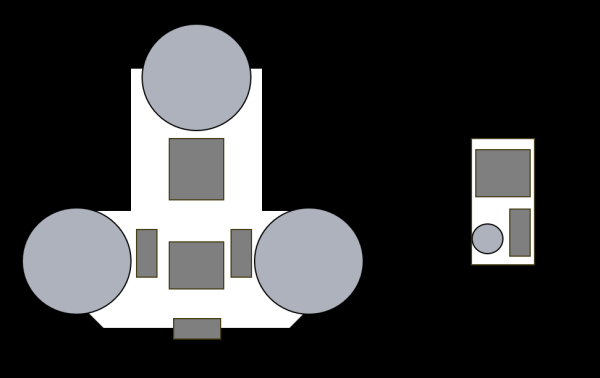
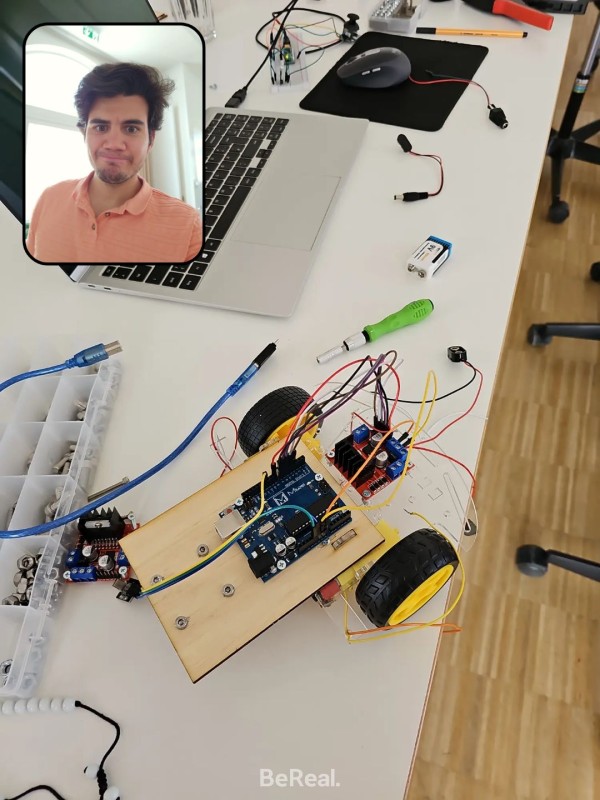
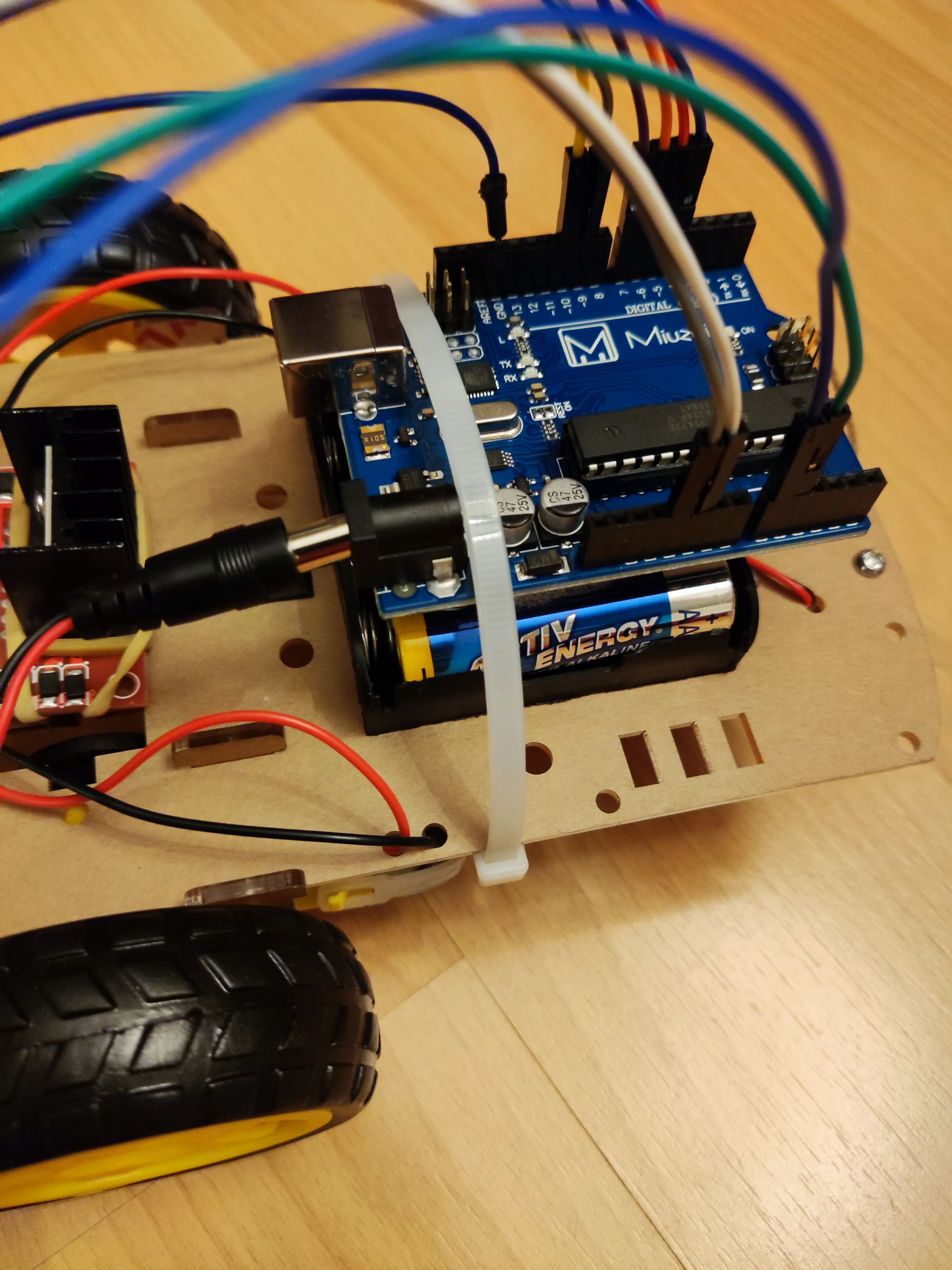
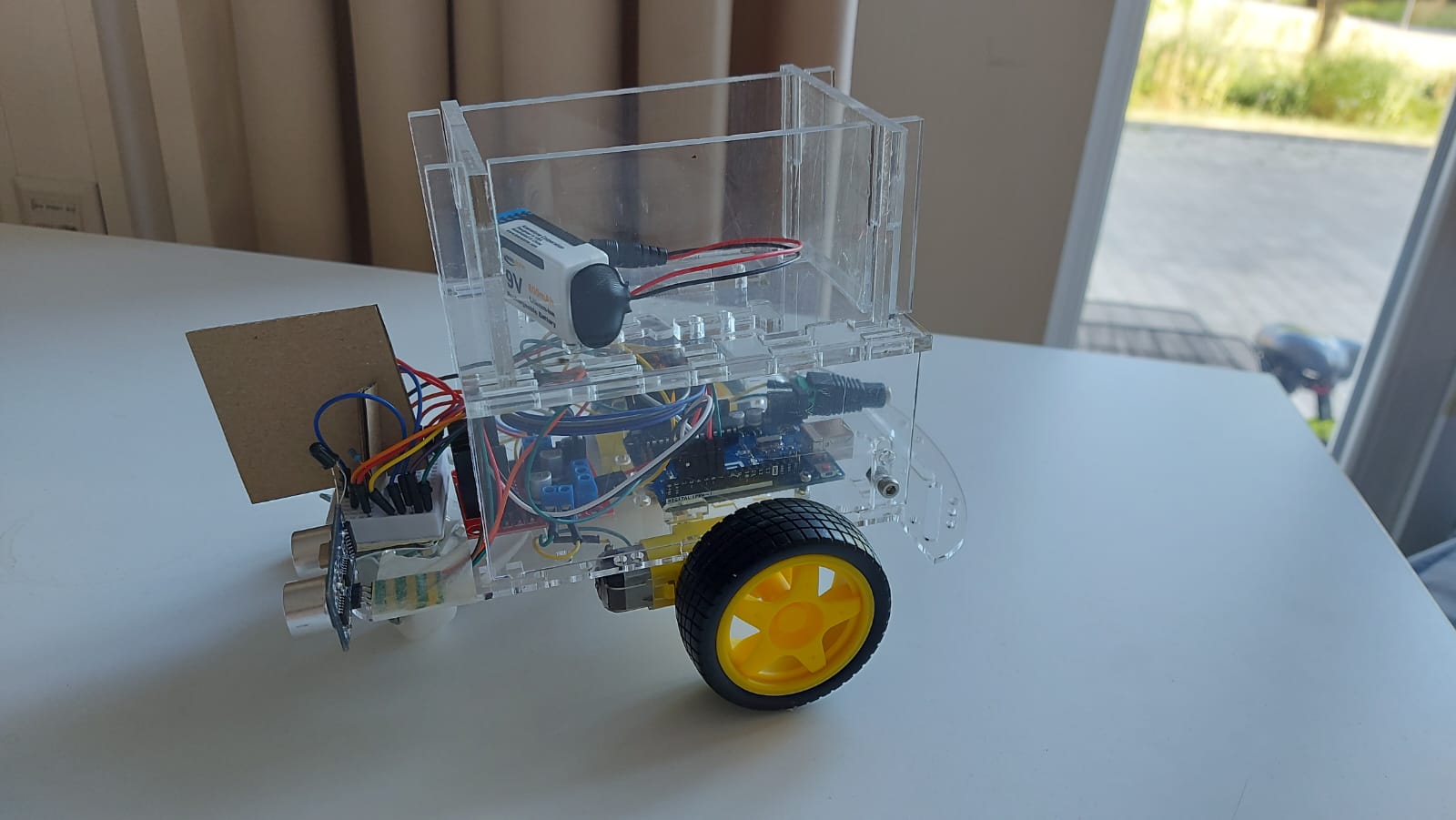
Aufbau:
Zwei Räder werden durch zwei Motoren betrieben, die getrennt angesteuert werden können. Das dritte Rad hinten ist frei beweglich. Durch unterschiedlich starkes Ansteuern wird die Richtung bestimmt, in die das Auto fährt.
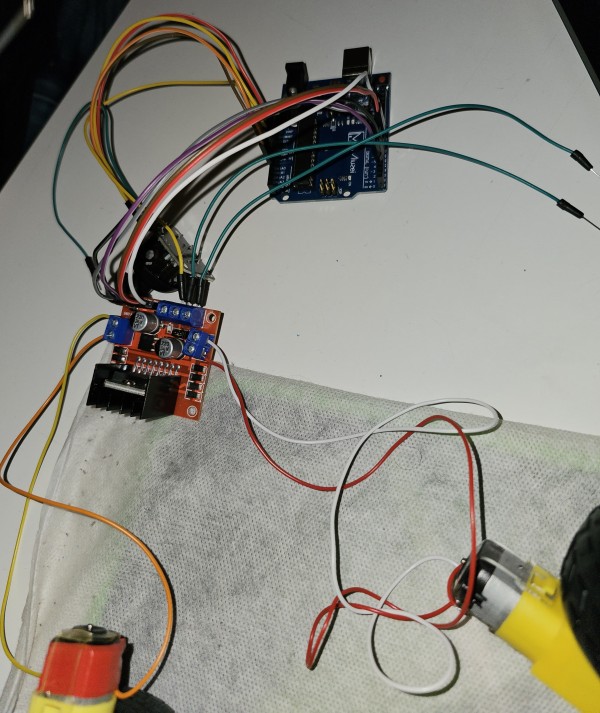
Prozess:
Zunächst ging es darum, eine einfache Ansteuerung von zwei Motoren über Kabel zu ermöglichen. Danach wurde es schwieriger. Um eine kabellose Kommunikation zwischen Fernsteuerung und Auto zu ermöglichen, musste ich nach und nach verschiedene Ansätze ausprobieren.
Erster Ansatz: Funk
Ergebnis: Zu langsam. Funk eignet sich scheinbar nicht, um mehrere Tausend Signale pro Minute zu senden. Zumindest nicht mit den Funkantennen, die mir zur Verfügung standen.
Zweiter Ansatz: Infrarot
Ergebnis: Die Signalrate ist nun kein Problem mehr, aber leider stören sich die Signale nun gegenseitig und erzeugen unerwünschte Daten. Das Auto ist dadurch nicht vernünftig steuerbar.
Finaler Ansatz: ESP32
Ergebnis: ESP-NOW ist ein Wi-Fi-Protokoll, das den Austausch von Daten bis zu 250 Bytes in Hundertstel-Sekunden-Takt ermöglicht. Die Reichweite des Signals beträgt bis zu 300 Meter bei freier Sicht. Interferenzen sind also quasi nicht vorhanden. Perfekt also für das Fernsteuern eines Autos.
Das habe ich gelernt:
Das Projekt klingt zunächst nicht spektakulär. Jedoch musste ich nach und nach neue Ansätze aufgreifen, verstehen und integrieren. Dabei habe ich gelernt, Funk, Infrarot und ESP-Protokolle anzuwenden und zur Kommunikation zwischen Geräten zu nutzen. Auf diesem Weg habe ich mit jedem neuen Ansatz die Vor- und Nachteile der einzelnen Übertragungsmedien erfahren. Das Projekt hat mir gezeigt, dass es frustrierend sein kann, wenn etwas nicht funktioniert, wie man es möchte, aber es lohnt sich, dranzubleiben, weil es Spaß macht, wenn es dann funktioniert.
Lernkurve: Exponentiell.
——————————————————————————————————————-
Semester Project
Johannes Biess
This project was an exam performance in the subject Technical Fundamentals 1. The project could be chosen by us students ourselves. The only requirement was to use the Arduino IDE. Additionally, sensors were supposed to be used.
Topic Selection:
An inspiration for this project was a remote-controlled car with the driving concept of a lawn robot.
Materials:
2 x ESP32
1 x Ultrasonic sensor
1 x H-bridge
1 x Voltage converter
2 x 5V motors
3 x 9V batteries
1 x Joystick
Cables, breadboards, capacitors, wood
Setup:
Two wheels are driven by two motors that can be controlled separately. The third wheel at the back is free to move. By controlling them with different strengths, the direction in which the car moves is determined.
Process:
Initially, the focus was on enabling simple control of two motors via cables. Then it became more challenging. To enable wireless communication between the remote and the car, I had to try out different approaches, one after another.
First Approach: Radio Frequency (RF)
Result: Too slow. RF doesn’t seem suitable for sending several thousand signals per minute. At least not with the RF antennas I had available.
Second Approach: Infrared (IR)
Result: The signal rate is no longer a problem, but unfortunately, the signals interfere with each other, generating unintended data. As a result, the car cannot be controlled properly.
Final Approach: ESP32
Result: ESP-NOW is a Wi-Fi protocol that allows data exchange up to 250 bytes in hundredths of a second. The signal range can reach up to 300 meters with a clear line of sight. Interferences are practically non-existent. Perfect for remote-controlling a car.
Conclusion:
At first, the project may not sound spectacular. However, I had to gradually explore, understand, and integrate new approaches. Along the way, I learned to apply and utilize RF, IR, and ESP protocols for device communication. With each new approach, I experienced the advantages and disadvantages of different transmission media. The project taught me that it can be frustrating when things don’t work as intended, but it’s worth persevering because it’s satisfying when it eventually works.
Learning curve: Exponential.