Smart Tools
ROS

Jährlich ertrinken weltweit 236.000 Menschen.
Nur ein Bruchteil aller Gewässer wird bewacht.
Die Anzahl der Rettungsschwimmer sinkt.
Mit ROS haben wir ein System geschaffen, welches Rettungsschwimmer bei der Gefahrenerkennung unterstützt und auch unbewachte Gewässer sicherer macht.
Das RettungsObjektSystem kurz: ROS, besteht aus verschiedenen Produkten.
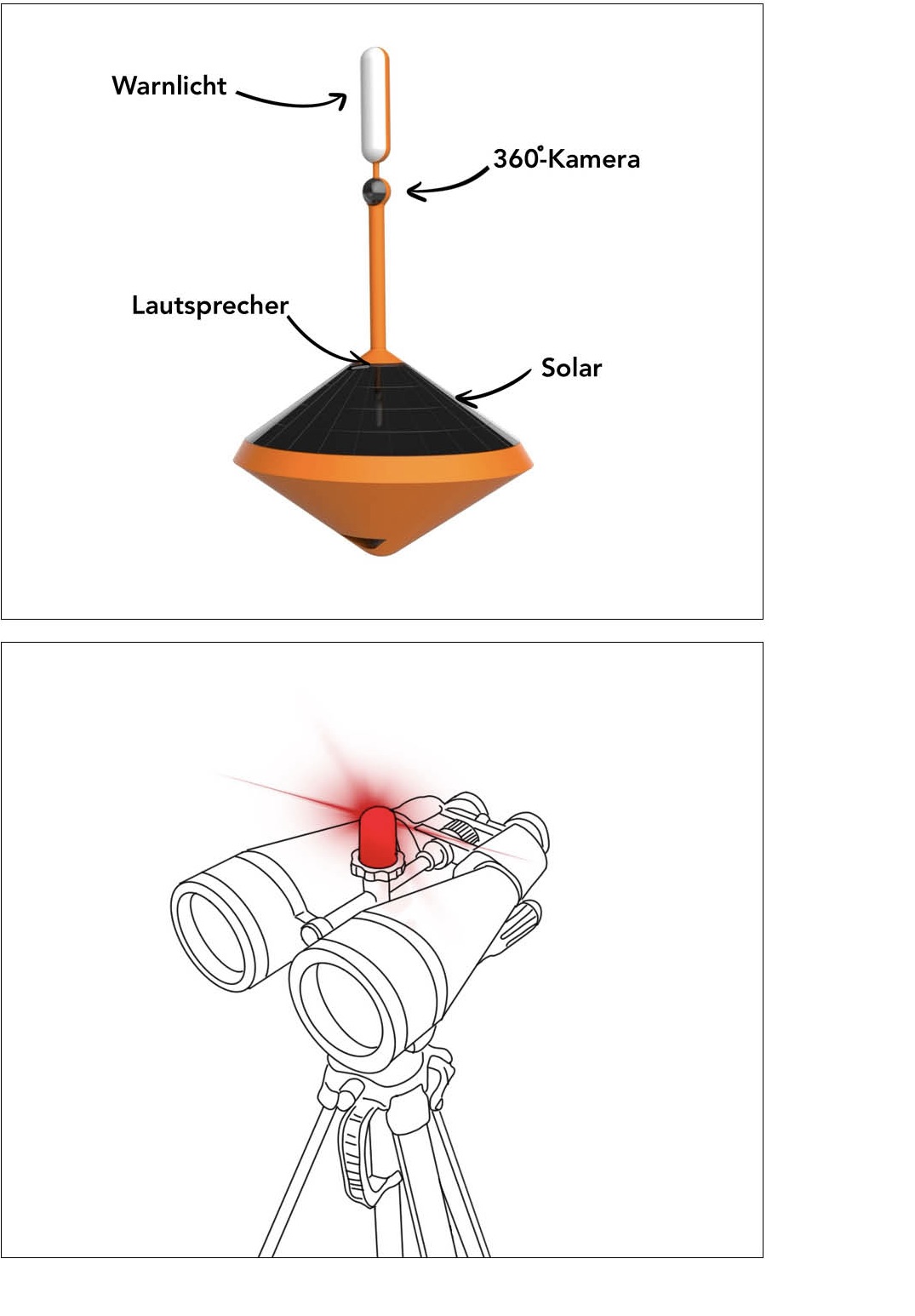
Boje & Fernglas
Doch wie funktioniert ROS?
… bei bewachten Gewässern
Die Boje erkennt über seine 360 Grad Kamera, dass sich eine Person in Gefahr befindet. Mittels einem trainierten Modell erkennt das System Bewegungsmuster, die mit Erschöpfung und dem Ertrinken einhergehen. Das Warnlicht der Boje schlägt Alarm und übermittelt im selben Augenblick das Signal an den Rettungsschwimmer. Eine Leuchte am Fernglas beginnt zu blinken und ein akustisches Signal ertönt. Blickt der Rettungsschwimmer durch das Fernglas, so erscheinen Pfeile in welche Richtung das Fernglas bewegt werden muss. Die Position, der in Gefahr geratenen Person, wird fixiert angezeigt. Zusätzlich können Strömungslinien sichtbar gemacht werden. Mittels einem Druckknopf, kann sich der Rettungsschwimmer auf die Bojen-Kamera schalten, um die Situation genauer bewerten zu können. Nach einer schnellen Einschätzung leitet er Rettungsmaßnahmen ein.
… bei unbewachten Gewässern
Die Boje erkennt mittels der gleichen Technologie, ob eine Person in Gefahr schwebt. Jedoch wird hier das Signal direkt an die Notrufzentrale weitergeleitet. Die Zentrale kann sich auf die Bojen-Kamera schalten und einen Livestream zur Situationseinschätzung anschauen. So wird ein unnötiges Ausrücken der Rettungskräfte vermieden. Die Zentrale kann der Person über einen Lautsprecher Anweisungen geben, ihr gut zureden und sie darüber informieren, dass Rettung auf dem Weg ist.
In diesem Szenario wäre der Einsatz einer Rettungsinsel-Boje sinnvoll. In ihr steckt die gleiche Technik, jedoch bietet sie zusätzlich einen Platz, um wieder zu Kräften zu kommen.

Um ohne große Anstrengungen auf die Insel zu kommen, befindet sie sich ein paar Zentimeter unter Wasser. Der Schwimmer, kann einfach auf die Insel drauf schwimmen und muss keine weiteren Kräfte aufbringen.
Auf der Insel kann man nur sitzen, nicht stehen. Der Innenraum bietet eine Höhe von etwa 1,10m.
Der Prototyp

Prototypisch haben wir uns für dieses Projekt auf das Fernglas konzentriert. Unser Fernglas besteht aus dem Fernglas selbst, einem Raspberry Pi, zwei Kameras, einem LED-Ring als Statusanzeige und einem ESP 8266, der die gesamten Sensorwerte aufnimmt und den LED-Ring steuert. Die Kameras filmen durch das Fernrohr und das Bild wird wie bei einer VR-Brille auf dem Display angezeigt, sodass das Fernglas seine normale Funktionalität beibehalten kann. Auf Knopfdruck kann man auf die Boje schalten, die für den Prototyp durch eine virtuelle Unity-Szene simuliert wird.
Das Fernglas verwendet ein Gyroskop, um seine Position im Raum zu tracken und sendet diese per Socket IO an die Boje, die dem Nutzer den entsprechenden Ausschnitt der Kamera zeigt. In unserem Prototyp wird in Unity die Person durch einen roten Kreis auf dem Wasser und ein Ausrufezeichen über der Person hervorgehoben. Der Pfeil zeigt, wie es unser Konzept vorsieht, immer in Richtung der ertrinkenden Person.
Das Bild der Unity-Szene wird dann per ffmpeg mit einem UDP-Stream zurück an das Fernglas geschickt, wo es auf dem Display zu sehen ist. Im fertigen Produkt müsste die Unity-Szene durch die echte Boje ersetzt werden, und die Verbindung sollte durch eine moderne Verbindungsmethode wie zum Beispiel WebRTC erfolgen, um die nötige Zuverlässigkeit zu garantieren.
Friederike Bechtel, Stefanie Kurtzrock, Fabian Rafreider, Timea Palomba
BetreuungLuca Stetter, Prof. Dr. Susanne Schade
Tags


