Der Kurs bietet eine Einführung in Arduino, Elektronik, Programmierung und den kreativen Umgang mit Technologie. Die Studierenden lernen mitunter Arduino-Projekte umzusetzen und eigene Ideen zu entwickeln.
Unser Projekt ist ein interaktiver Malroboter. Die Basis bietet ein Arduino-Mikrocontroller, der über den Code jeden der 3 Schrittmotoren individuell ansteuern kann.
Themenfindung:
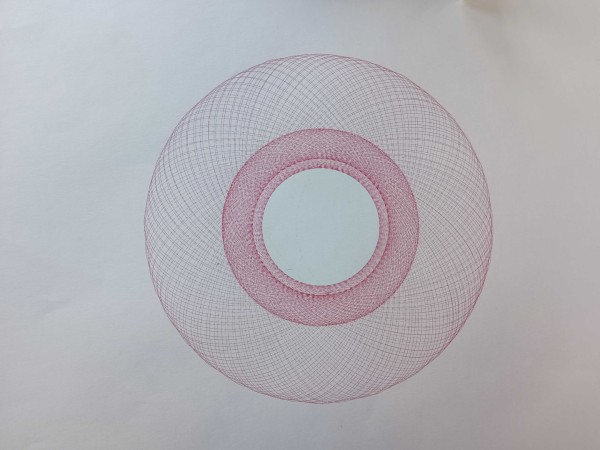
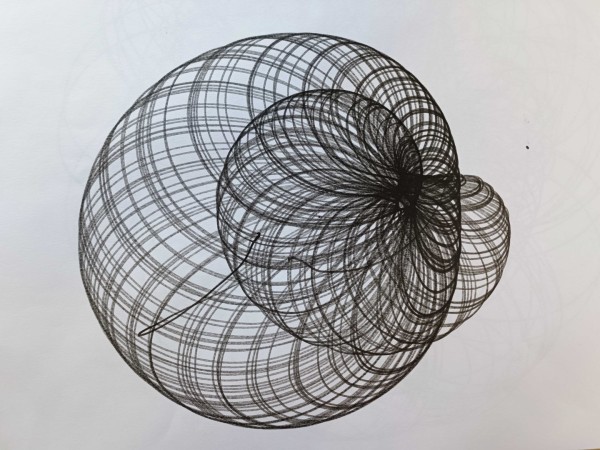
Die Idee war, einen Malroboter zu bauen, der durch den Benutzer individuell gesteuert werden kann, um einzigartige Muster zu erschaffen.
Material:
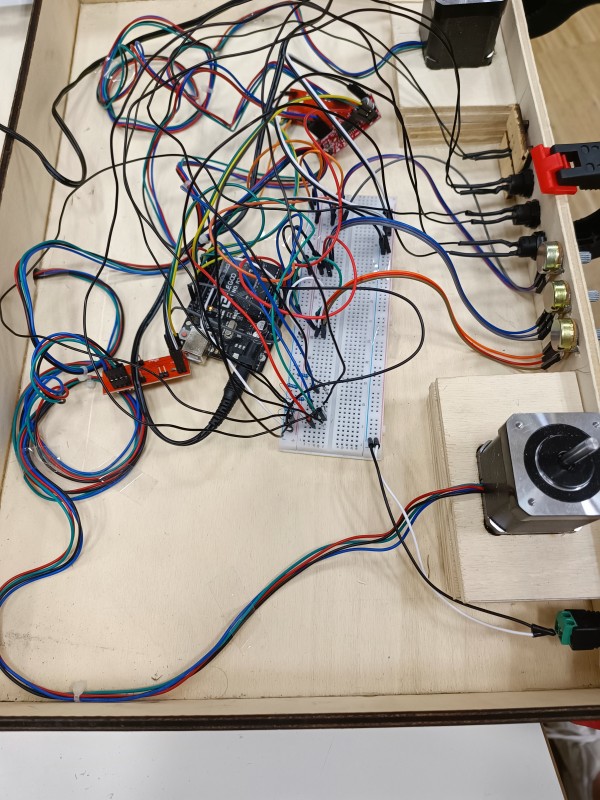
Arduino Uno, Breadboard, Jumper Wire, USB-Kabel
3x Schrittmotor AccelStepper
3x Treiber EasyDriver
3x Potentiometer
4 Kugellager
160 x 60 x 0,4 cm Holz
3D-Druckelemente
Potentiometer-Aufsteckkopf
Aufbau:
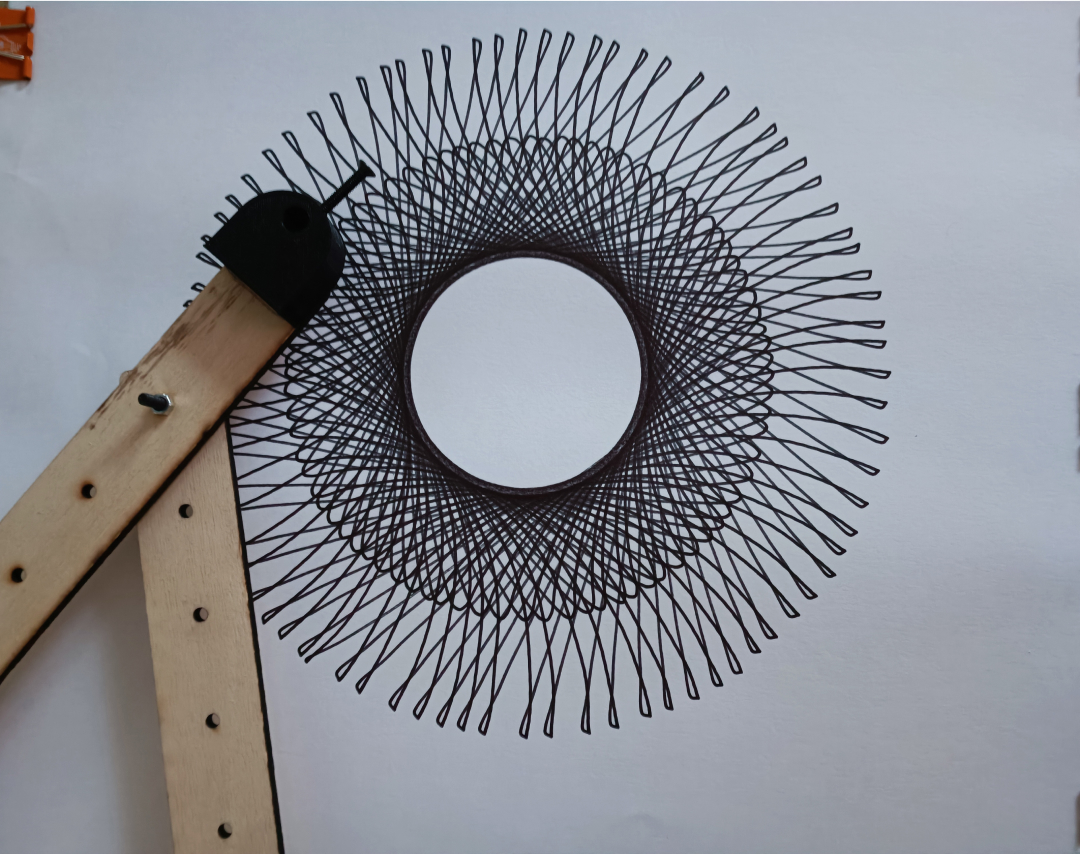
Die Arme werden mit zwei der Schrittmotoren verbunden. Dabei wird ein 3D-gedrucktes Gelenk mit Kugellagern dazwischengesteckt, um eine reibungslose Rotation zu gewährleisten. Am anderen Ende der Arme werden sie verbunden und es wird ein eigens angepasstes Halterungsstück für den Stift angebracht. Die Holzplatte mit der Maloberfläche wird ebenfalls mit einem 3D-gedruckten Steckteil auf dem dritten Schrittmotor befestigt. Alle drei Motoren sind außerdem mit einem Treiber und einem Potentiometer verbunden, um die Geschwindigkeit und Beschleunigung zu steuern.
Funktionsweise:
Sobald man den Roboter einschaltet, fangen die Arme und die Maloberfläche an zu drehen. Standardmäßig sind sie auf die langsamste Geschwindigkeit eingestellt. Dreht man nun an einem der drei Potentiometer, verändert es die Geschwindigkeit des entsprechenden Schrittmotors. Somit kann man das Muster des Roboters verändern.
Prozess:
Zu Beginn ging es darum, die Arme und die Maloberfläche des Roboters über Schrittmotoren zu bewegen. Dabei haben wir uns für die leistungsstarken Schrittmotoren “AccelStepper” entschieden. Um diese anzusteuern, benötigten wir einen Treiber namens “EasyDriver” und die passende Library für den Code, “AccelStepper”.
Nachdem dies funktionierte, ging es darum, die Potentiometer zur Steuerung der Motoren einzubinden. Das Ziel war es, den gesamten Malprozess interaktiv zu gestalten. Damit die Werte des Potentiometers auch für den Motor nutzbar waren, mussten wir sie im Code mappen, also umrechnen lassen.
Sobald der Code fertiggestellt war, ging es darum, das Design des Roboters zu gestalten. Wir haben die größeren Bauteile wie die Holzplatte der Maloberfläche, die Verkleidung der technischen Hardware und die Malarme selbst mit dem Lasercutter ausgeschnitten. Feinere Elemente wie die Gelenke und das Halterungsstück für den Stift haben wir in CAD entworfen und ausgemessen, und anschließend im 3D-Drucker hergestellt. Zum Schluss musste noch alles verkabelt, geleimt und zusammengesteckt werden.
Fazit:
Während des gesamten Prozesses mussten wir uns mit neuen Techniken und Problemstellungen auseinandersetzen. Beispielsweise hatten wir zum ersten Mal mit Libraries gearbeitet, als wir den Code geschrieben haben. Um den Roboter zu bauen, mussten wir Teile in CAD entwerfen, was für uns ein komplett neues Programm war, und sie anschließend mit dem Laser schneiden, was wir zuvor noch nie gemacht hatten. Neben den neuen Fähigkeiten, die wir dabei erlernt haben, war wohl das wichtigste Learning, wie wichtig es ist, zu prototypen und auszuprobieren. Unsere ersten Prototypen des Roboters hatten beispielsweise Schwierigkeiten wie eine zu große Rotation oder einen zu geringen Abstand zur Maloberfläche.
Doch wenn wir schließlich den Punkt erreichten, an dem alles funktionierte, überwog die Freude die vorangegangenen Schwierigkeiten bei Weitem.