Interface Design 1
Car Control

Ziel des Kurses
In dem Kurs Interface Design 1 ging es darum, einen Funktionsprototypen für ein Auto-Rennspiel mithilfe von Arduino zu bauen. Dabei sollte auch das Design berücksichtigt werden.
Konzept
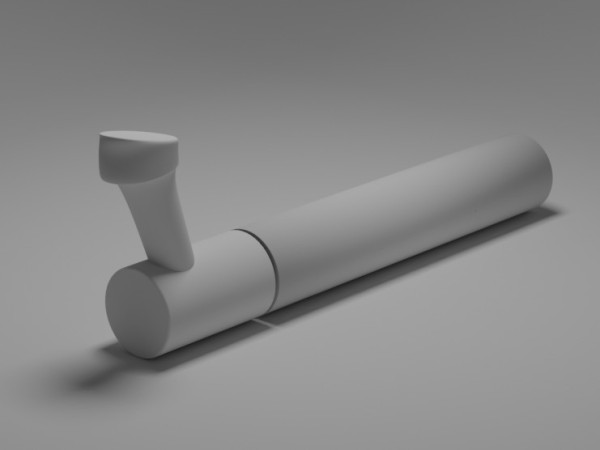
Zunächst machten wir uns mithilfe der “Crazy 8” Methode Skizzen, welche wir schließlich miteinander verglichen. Wir einigten uns auf eine Autosteuerung, welche man anhand einer Schiebe - und Schwenkbewegung nutzen kann. Die Steuerung ist auf den Armlehnen eines Autositzes angebracht. Bewegt man die Griffe nach hinten, gibt man Gas. Drückt man die Griffe nach vorne, wird ein Bremsvorgang ausgeführt. Durch das Schwenken der Griffe in die jeweilige Richtung kann man lenken. Wir haben uns bewusst für diese Richtungen entschieden, da der Körper durch die sogenannten “G-Kräfte” beim Bremsen nach vorne gedrückt wird. Würde man jetzt beim Bremsen die Griffe nach hinten ziehen, schiebt es den Körper nach vorne. Durch unsere umgekehrte Steuerung kann der Fahrer sich mithilfe der Griffe in den Sitz drücken und hat somit einen besseren Halt.
Beide Griffe erfolgen parallel, das heißt bewegt man den einen Griff unabhängig vom anderen, wird der andere Griff mitgezogen.
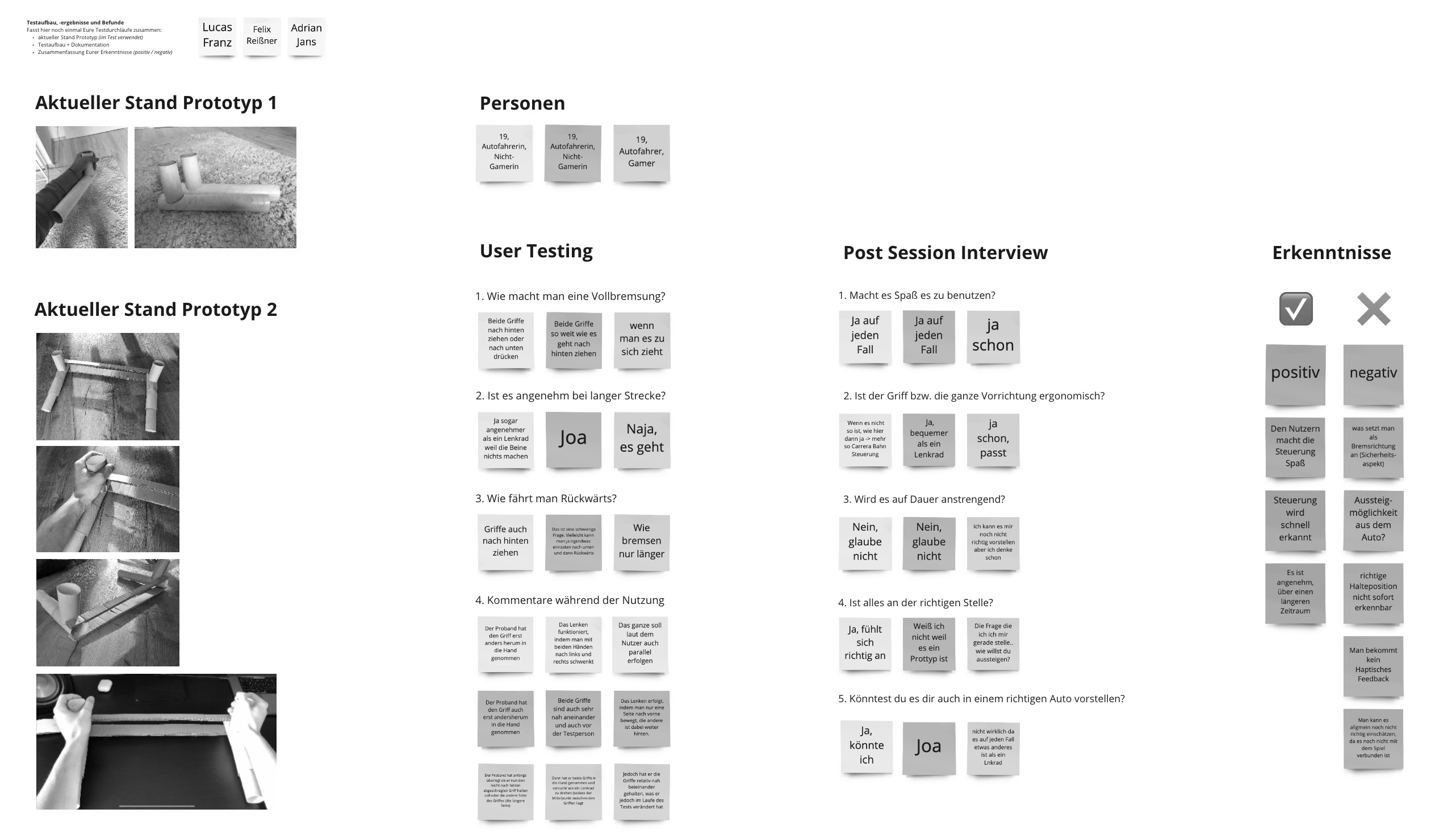
User-Testing
Der erste Prototyp ging in ein User-Testing um heraus zu finden, was gut ist oder was noch geändert werden musste. Angesprochene Probleme oder Fehler wurden im Laufe des Projektes behoben.
Funktionsweise
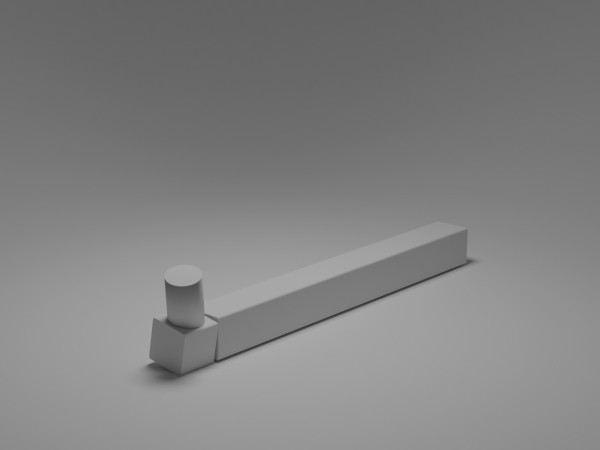
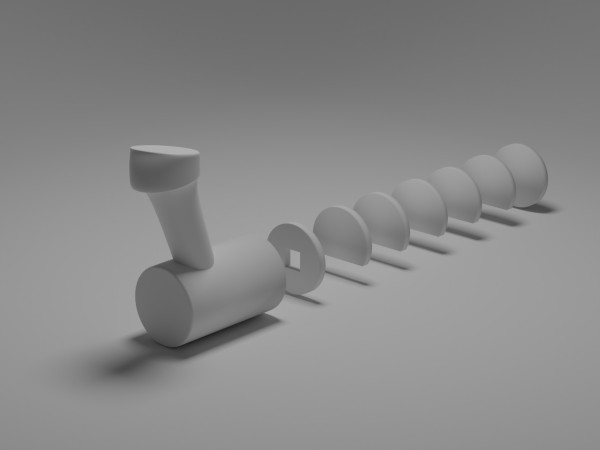
Für die Umsetzung benötigten wir für die Lenkung einen Potentiometer, welcher die Neigung des Griffes berechnet. Für das Gasgeben bzw. Bremsen benötigten wir einen Hall-Sensor, welcher mithilfe von Magnetstreifen den zurückgelegten Weg berechnet.

Designprototyp
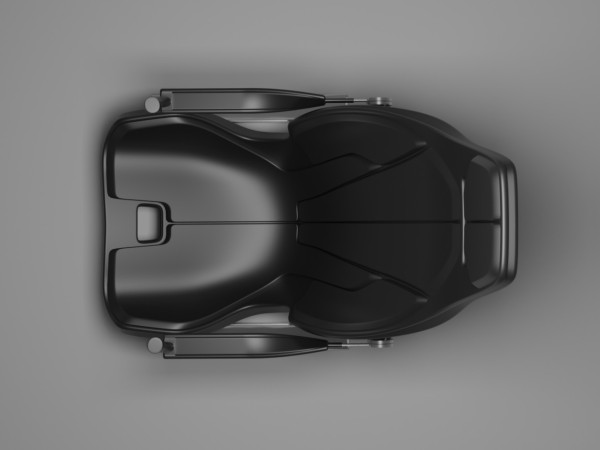
Uns war wichtig, die Autosteuerung in den richtigen Kontext zu setzen und nicht einfach nur den Prototyp alleine an sich darzustellen. Wir entschieden uns dazu, unsere Autosteuerung in Verbindung mit einem Autositz zu bringen, da dieser unseren Aufbau am besten veranschaulichen konnte. Mithilfe dieser Ausgangslage erstellten wir mehrere Varianten unseres Autositzes.
Adrian Jans, Lucas Franz, Felix Reissner
BetreuungProf. Michael Schuster, Prof. Carmen Hartmann-Menzel
Tags