Prototyping / Redesign
WiWa - Ein Wildwechsel Warnsystem

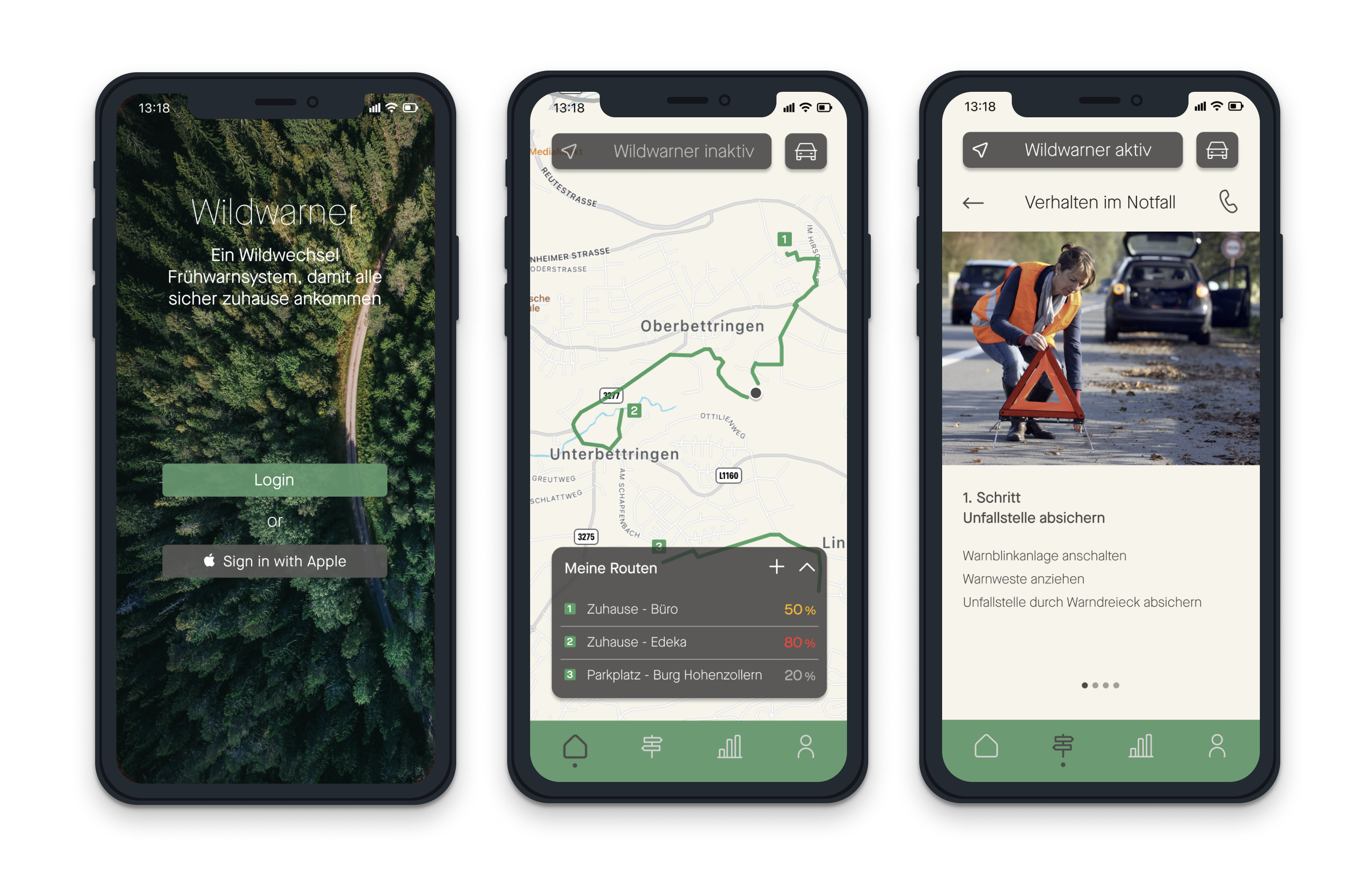
WiWa - Ein Wildwechsel Warnsystem, damit alle sicher zuhause ankommen
WiWa ist ein am Leitpfosten befestigtes Sensorsystem, welches den Autofahrer sowohl lokal an Gefahrenstellen warnt, als auch die Daten extern sammelt und analysiert.
Prozess
Der Themencluster rund um Wildwechsel, das Verhalten der Tiere und bereits bestehenden Lösungen war für uns beide Neuland, weswegen wir uns zunächst mit Förstern unterhielten und uns nach vergleichbaren Wildwarn-Produkten umsahen.
User Research
Unsere Gespräche mit dem Förster Joachim Stier und dem Jagdpächter Timo Schmitt lieferten uns zahlreiche Erkenntnisse und halfen uns beim Validieren verschiedener Konzepte. Auch die Erlaubnis in seinem Pachtgebiet eine Wildkamera zu installieren, half uns dabei nachvollziehen zu können wie oft Wild an gefährdeten Stellen passiert.
Produktansätze
Bereits bestehende Lösungen zeigen jeweils verschiedene Schwachstellen auf. Die häufigste Methode, die eingesetzt wird, um Wildwechsel zu vermeiden sind blaue Reflektoren, welche am Leitpfosten montiert werden. Das entstehende blaue Licht soll die Tiere alarmieren und zum Verharren bringen. Wie sich im Gespräch mit unseren Experten allerdings herausstellte, gewöhnen sich die Tiere bereits nach 3 bis 4 Monaten an das Licht, womit das System zwar anfangs vergleichsweise gut funktioniert, dann aber sehr schnell seine Effektivität verliert. Auch andere Produkte, welche über einen hochfrequenten Ton versuchen Wild zu warnen, besitzen den selben Nachteil. Es wird also klar, wenn man konsequent und nachhaltig Wildunfälle verhindern will, muss der Autofahrer gewarnt werden. Unsere neue Nutzergruppe sind also Autofahrer.
Umsetzung
Konzepte
Bei der Umsetzung gingen wir durch viele verschieden Iterationsphasen, deren Ablauf meistens so aussah:
- Umsetzungskonzept erstellen
- Prototypen
- Testen
- Validieren
- Verbessertes Konzept generieren
Zunächst wollten wie den Wechsel durch eine Lichtschranke am Straßenrand detektieren. Wir bauten einen Prototyp, mit einem Raspberry Pi, welcher eine Nachricht sendete, sobald die Lichtschranke durchbrochen wird. Um diese Durchbrechung der Lichtschranke validieren zu können, ergänzten wir unseren Prototyp in der nächsten Iteration durch eine Infrarot-Kamera. Nun konnten wir den Wechsel erkennen und in einem externen Service auswerten lassen.
Auch dieses Konzept musste leider überarbeitet werden, denn nach einem gemeinsamen Gespräch mit Franz Biggel über eine mögliche Stromversorgung mit Hilfe eines Solarpanels, wurde klar, dass unser aktueller Prototyp einen zu hohen Strombedarf hat.
Im finalen Prototyp, funktioniert die Detektierung des Wechsels ausschließlich über die Infrarot-Kamera.
Codestruktur
Der Code auf dem Raspberry Pi funktioniert mithilfe von OpenCV und background substraction. Jeder neue Frame wird mit einem Referenzframe verglichen und die Unterschiede erfasst. Wenn ein Objekt erkannt wird, wird ein Bild aufgenommen und dieses an unser Backend geschickt.
Warnung vor Ort
Nachdem nun ein Bild in der Datenbank gespeichert wurde, ist der nächste Schritt die Warnung des Nutzers. Diese erfolgt über drei Wege und im Folgenden erläutern wir die Warnung vor Ort. Diese ist vor allem für die Nutzergruppe wichtig, die kein Smartphone oder unsere App nicht haben. So können auch diese Autofahrer vor Wildwechsel gewarnt werden. Die standortgebundene Warnung ist dabei in zwei Teile, einem Verkehrsschild und einem Leitpfostenmodul unterteilt.
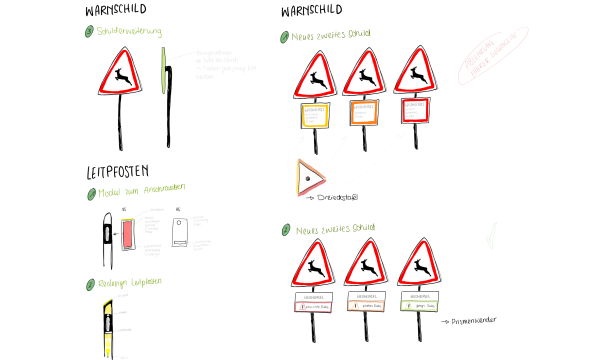
Verkehrsschild
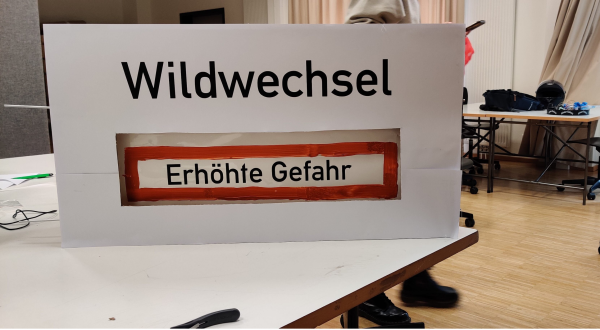
Der User soll das erste Mal auf den Sachverhalt und die Gefahrenlage aufmerksam gemacht werden, bevor er in die potentielle Gefahrenzone fährt. Dies passiert mit einem zusätzlichen Hinweis am herkömmlichen Wildwechselschild. Dafür haben wir uns mehrere Varianten überlegt und uns schlussendlich für einen Prismenwender entschieden und diesen geprototypt. Wir haben jedoch schnell festgestellt, dass ein Prismenwender viel zu groß sein würde und man das Problem auch sehr viel material- und kostenschonender lösen kann. Außerdem sollte es zur Produktsemantik des darüberhängenden Schildes passen und den Straßenverkehrsordnungen angepasst sein.
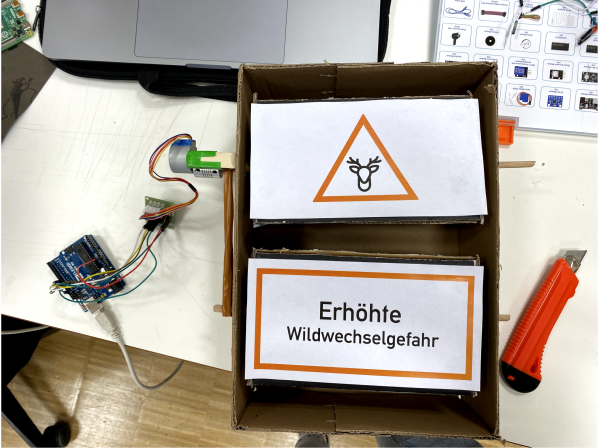
So arbeiteten wir eine zweite Variante aus. Die Grundlage bildet ein rechteckiges Schild mit den Maßen 126cm mal 68,4cm, das auf einer Höhe von ungefähr 1,80m hängt. Auf der unteren Hälfte wird ein 102,5cm mal 24,4cm großes Loch ausgelasert. Auf Höhe dieser Aussparung wird an die Hinterseite des Schildes eine schmale kleine Box angebracht. Darin befindet sich eine beschichtete Papierrolle, die von zwei Stangen, die durch zwei Zahnriemen verbunden sind, gedreht werden. Auf der Papierrolle befinden sich die drei Stati “Geringe Gefahr”, “Erhöhte Gefahr” und “Akute Gefahr”. Bei der zugehörigen Gefahrenlage kann dann der jeweilige Status angefahren werden und erscheint so in der ausgesparten Fläche.
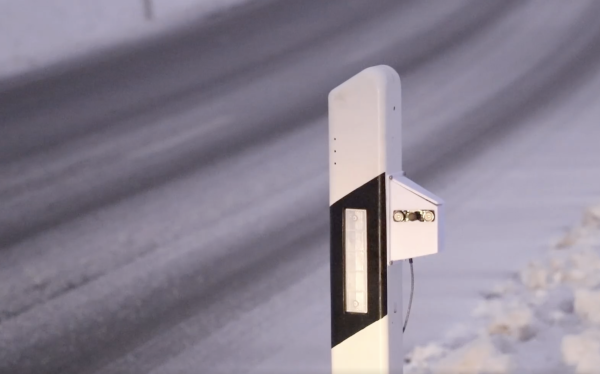
Leitpfosten
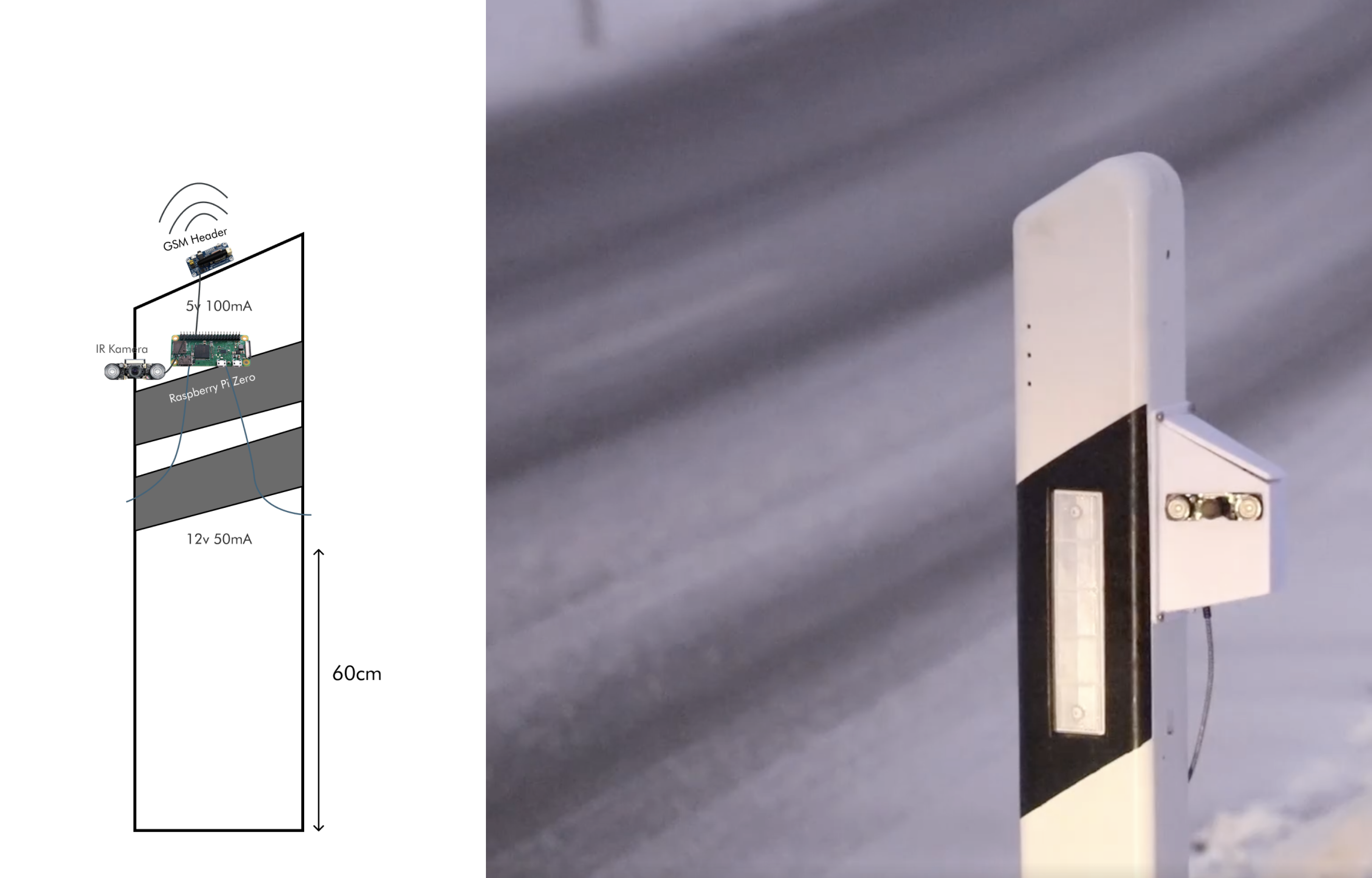
Die akute Warnung, die den Autofahrer im Gefahrenbereich selbst bekommt, befindet sich am Leitpfosten. Auch hier haben wir verschiedene Versionen ausgearbeitet. Der Leitpfosten kann mit einem modularen System versehen werden, welches man ganz einfach an den bereits vorhandenen Leitpfosten schraubt. Eine zweite Möglichkeit wäre ein intelligenter Straßenpfosten gewesen. Dabei würde man den Pfosten komplett redesignen und die Technik nach innen verbauen. Das Solarpanel würde man oben auf eine abgeschrägt Fläche montieren und eine Ausparung für das Kameramodul lassen. Wir haben uns gegen dieses Konzept entschieden, da dies mit einem großen Mehraufwand, hohen Kosten und einer schweren Umsetzung in der Realität verbunden gewesen wäre. Schon nur die Demontation aller Pfosten wäre eine große Herausforderung gewesen.
So entschieden wir uns für das modulare System. Dafür haben wir ein 3D-Gehäuse gedruckt. Charakteristisch dabei ist die Form, denn wir haben das Design extra an die Formen des Straßenpfostens angepasst. Das Gehäuse ist so platzsparend wie möglich konzipiert und lässt gerade genügend Raum für den RaspberryPi, den GSM Header und das Infrarotkameramodul. Auch die Außenseiten sind zum Einen so konzipiert, dass die Kamera in einem passenden Winkel positioniert ist und dass auf der Oberseite problemlos ein Solarpanel verbaut werden kann. Die abgeschrägte Fläche ermöglicht so ein etwas größeres Panel. So wird unser Leitpfosten autark, modular, einfach umsetzbar und wartungsoptimiert. Wir haben uns bemüht unseren Leitpfosten auch in der Realität testen zu können, haben aber leider in der kurzen Zeit keine Teststrecke bekommen. Die Straßenmeisterei Schwäbisch Gmünd, die Polizei und auch das Bundesministerium für Verkehr konnte uns dabei nicht unterstützen.
App
Hauptinteraktionen
Beim Frontend wollten wir die Erwartungen des Users erfüllen, die er an eine sicherheitsgewährleistende App hat. Sie muss dem User die Vorbereitung gewährleisten, die er braucht, um sich über seine Sicherheit und kommende Gefahrenzonen zu informieren. Die Daten und Bilder, die unser System sammelt, sollten dem User zur Verfügung stehen und auch während der Fahrt sollte der User ausreichend geschützt sein, nicht nur vor möglicher Interaktion am Handy, sondern auch vor lauernder Gefahr im Wald. Die Hauptinteraktionen sind deshalb ein Tool zur Analyse bestimmter Streckenabschnitte, eine Karte auf der man Pendlerstrecken und gefährliche Zonen einsehen kann, ein Wildunfall Guide und ein Aktivstatus mit visueller und akustischer Warnung.
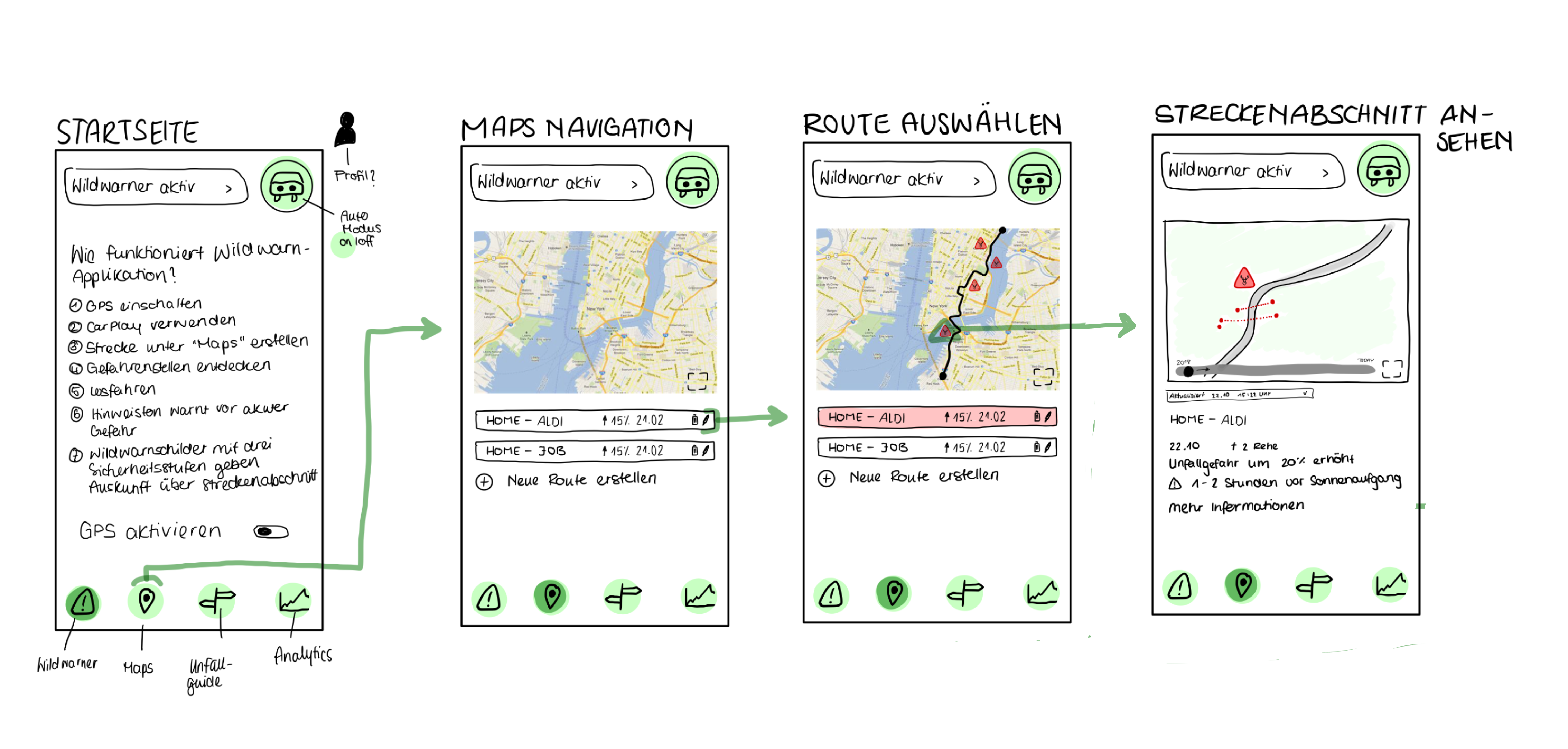
Low bis High-Fideltiy
Im Folgenden sind unsere drei Prozessschritte von Low-Fi bis High-Fi zu sehen:
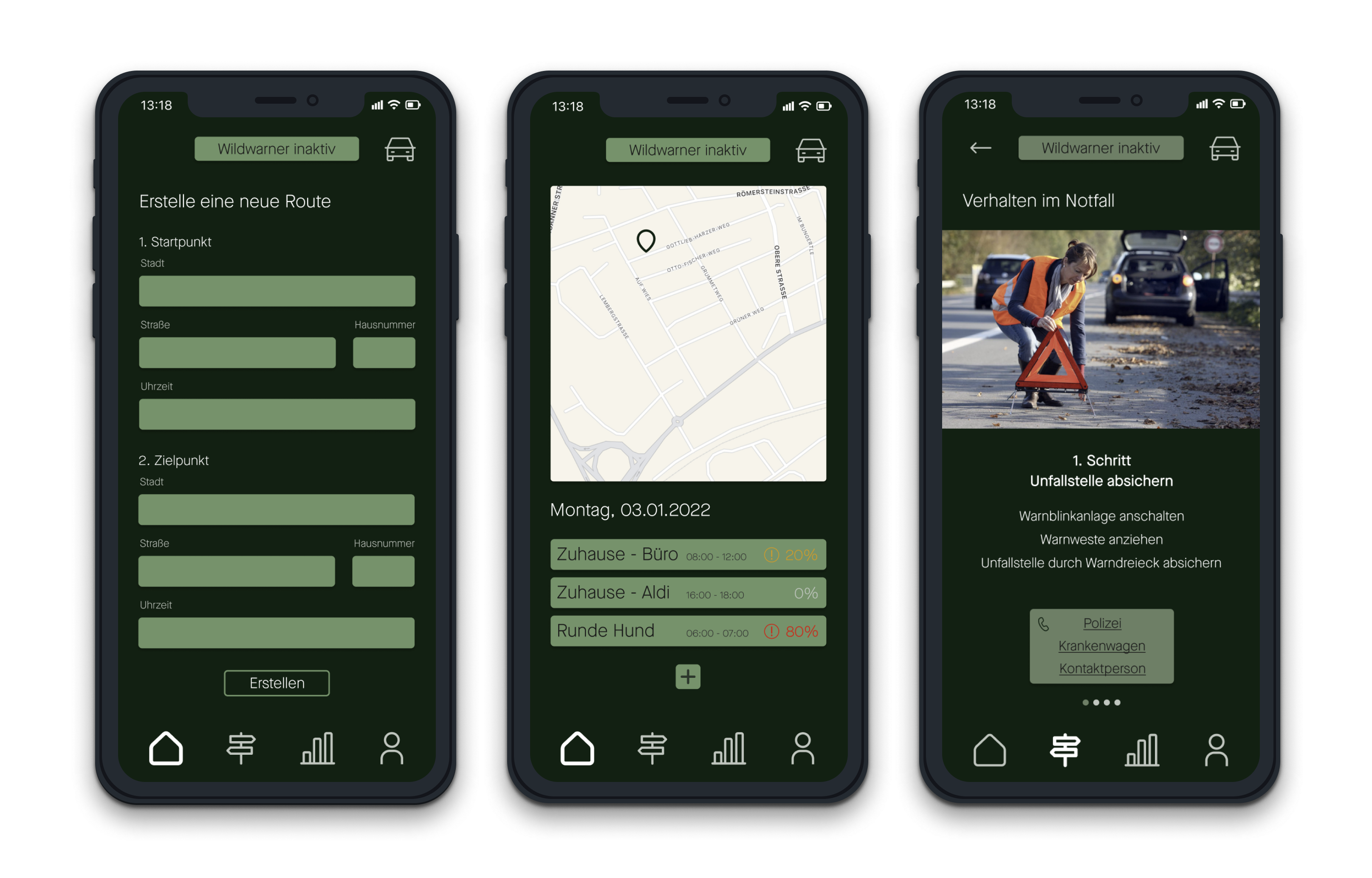
Funktionen
Das wichtigste Feature der App ist die Warnmeldung. Hier bekommt der Nutzer während dem Autofahren eine akustische und visuelle Nachricht. Damit der Nutzer während der Fahrt nicht abgelenkt wird, befindet er sich im Auto-Modus. Diese Seite der App ist so gestaltet, dass keine Interaktionen mit der App während der Fahrt vorausgesetzt sind oder eine visuelle Ablenkung entsteht. Der Auto-Modus ist deshalb in dunklen Farben und mit wenig Inhalt gestaltet.
Auf der Hauptnavigationsseite können Routen und Pendlerstrecken erstellt werden. Diese können auf der Karte angesehen werden. Zu jeder dieser Routen wird ein Gefahrenpotenzial errechnet, das dem User schnell und prägnant vermitteln soll, wie gefährlich es gerade auf dieser Strecke ist. Für weitere Informationen kann auf eine Strecke getippt werden und der Nutzer erhält Informationen zu Gefahrenstellen, bereits geschehenen Unfällen, Gefahrenzeiten und dem Tierbestand auf dieser Route.
Wenn ein Wildunfall passieren sollte, haben wir mit einer Schritt-für-Schritt-Anleitung alle Maßnahmen im Notfall vermerkt. Von hier aus können eingespeicherte Kontaktpersonen oder direkt die Polizei erreicht werden.
Ablauf und Features

Wenn das Kameramodul am Leitpfosten nun eine Bewegung aufnimmt, wird ein Bild gemacht und mithilfe von Motion Detection mit dem letzten Frame verglichen. Befindet sich ein Tier auf dem Bildmaterial gibt es eine lokale Warnung und die LED im Inneren des Leitpfostens fängt an zu leuchten. Auch das Wildwechselschild warnt den Autofahrer schon vor der Gefahrenzone und verändert den Status am Schild. Auf der App wird nun auch eine visuelle und akustische Warnung ausgegeben. So kommen Tier und Mensch sicher zuhause an!
Schlussendlich haben wir ein Warnsystem entwickelt, bei dem die Warnung über drei Wege zum Nutzer gelangen kann. Die Warnung durch das Verkehrsschild und den Leitpfosten erreicht den Nutzer auch ohne App und lokal am betroffenen Standort. Autofahrer, die die App haben können sich auch vor und nach der Fahrt über bevorstehende Gefahrenzonen informieren und bekommen im Ernstfall eine Warnung direkt aufs Handy. So haben wir die Sicherheit von Tier und Mensch im Fokus.
Joschua Rothenbacher, Fabienne Vatter
BetreuungProf. Michael Schuster, Benjamin Thomsen
Tags