Technische Grundlagen 2
Schreibmaschinenkommunikation
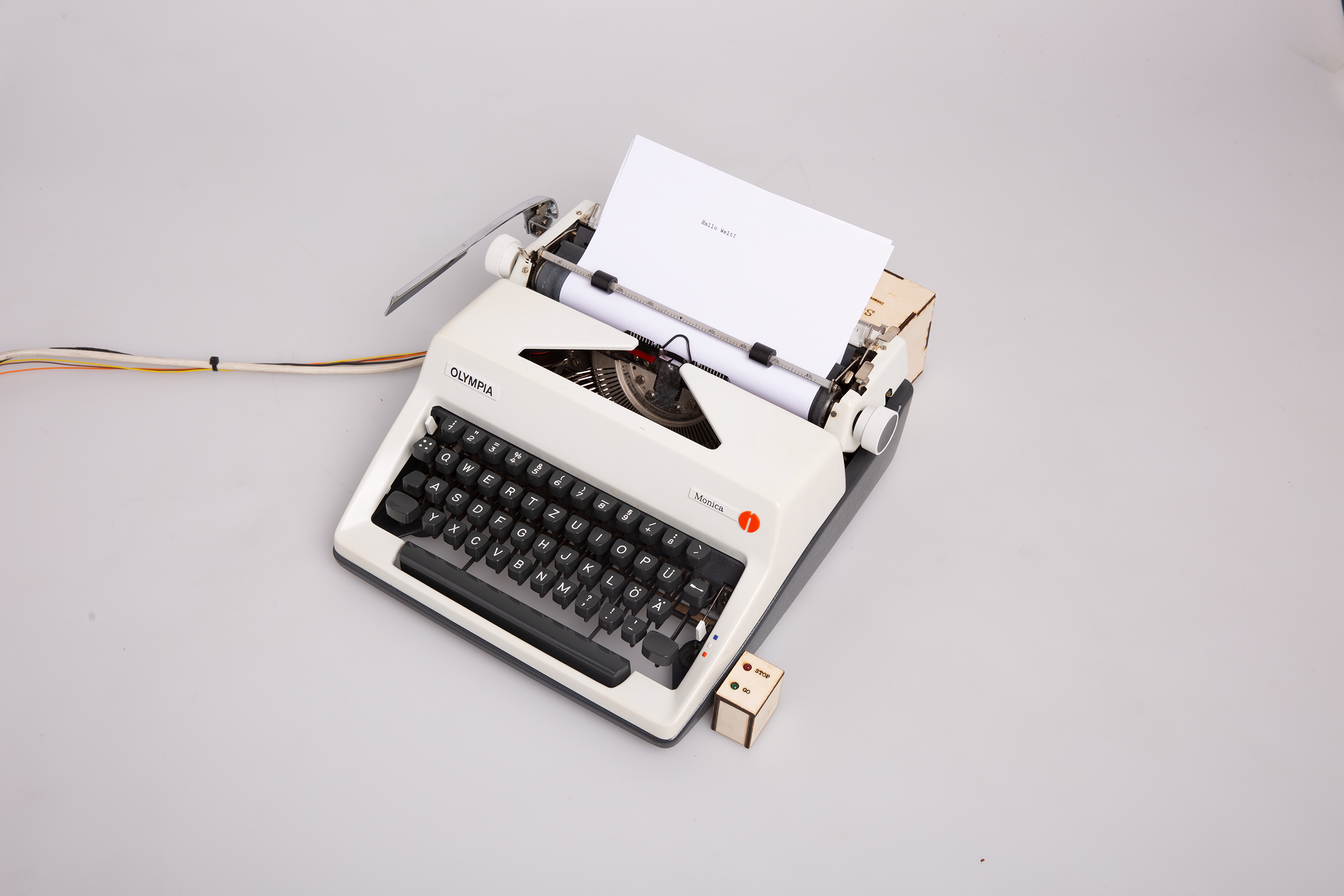
Unsere Idee war simpel: wir wollten zwei Schreibmaschinen miteinander kommunizieren lassen, hierfür sollte die eine als Eingabemedium und die andere als Ausgabemedium dienen. Die Maschine, mit der die Eingabe erfolgen soll, könnte man mit einer Tastatur am Computer vergleichen.
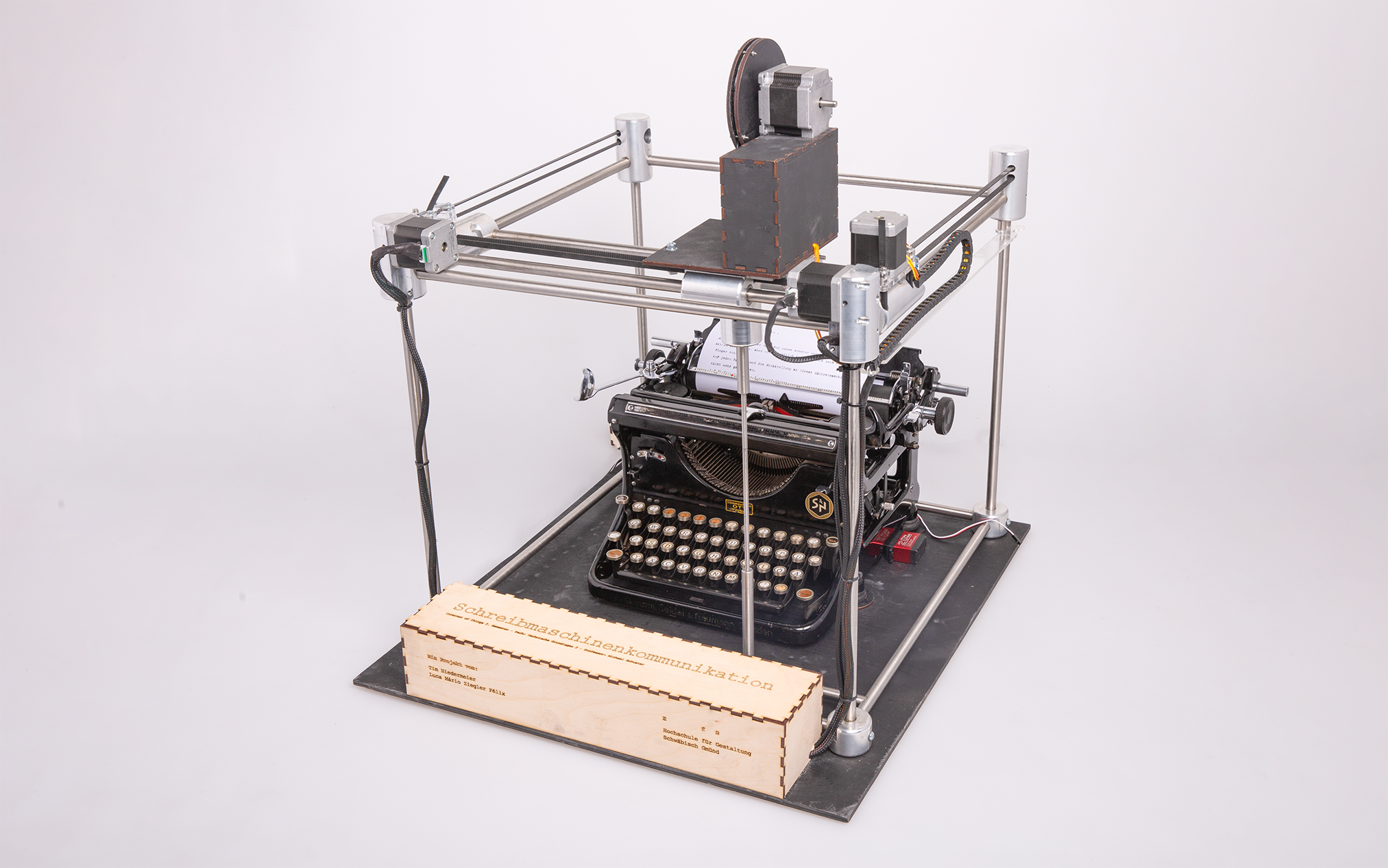
Für die Ausgabe wollten wir etwas Spektakuläres, etwas zum Bestaunen: ein “Roboterarm”, der die Tasten betätigt, - das wär’s!
Als Grundlage für die Kommunikation selbst sollten zwei Arduino UNO dienen, welche mittels Li-Fi, Datenübertragung durch Licht, miteinander kommunizieren. Das war uns aber noch nicht genug, wir wollten, dass die Kommunikation selbst sichtbar wird, also haben wir uns wieder etwas einfallen lassen: Das Licht soll über Acrylstäbe übertragen werden.
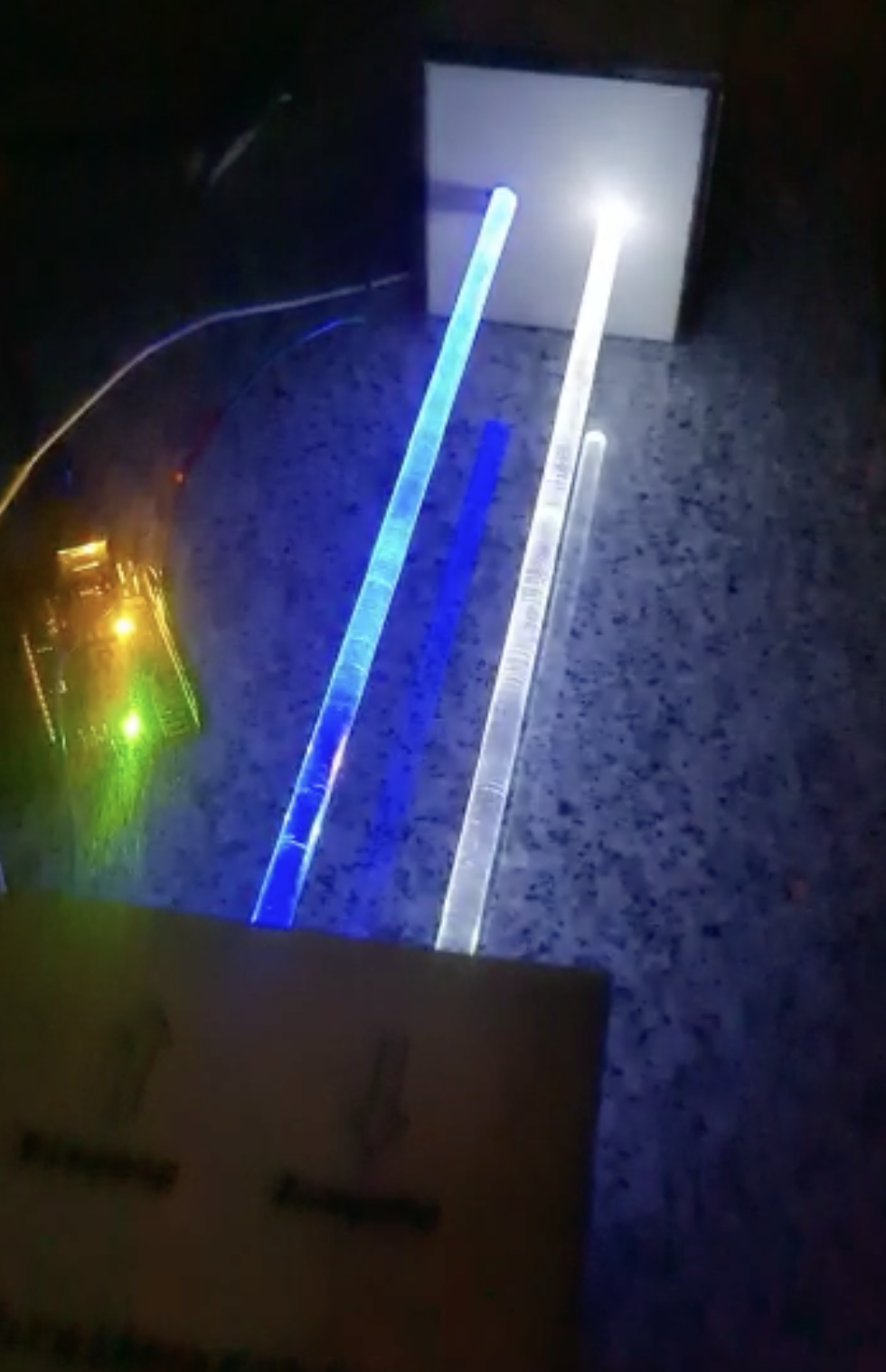
Als erstes haben wir uns um die Kommunikation zwischen den beiden Schreibmaschinen gekümmert. Hier haben wir festgestellt, dass Übertragung per Licht nicht immer gut zu sehen ist und durch äußere Einflüsse gestört werden kann. Aus diesem Grund haben wir zusätzliche Optionen für die Kommunikation geschaffen, dazu gehören:
MQTT (Machine-to-Machine-Kommunikation)
IrDA (Datenübertragung per Infrarotlicht)

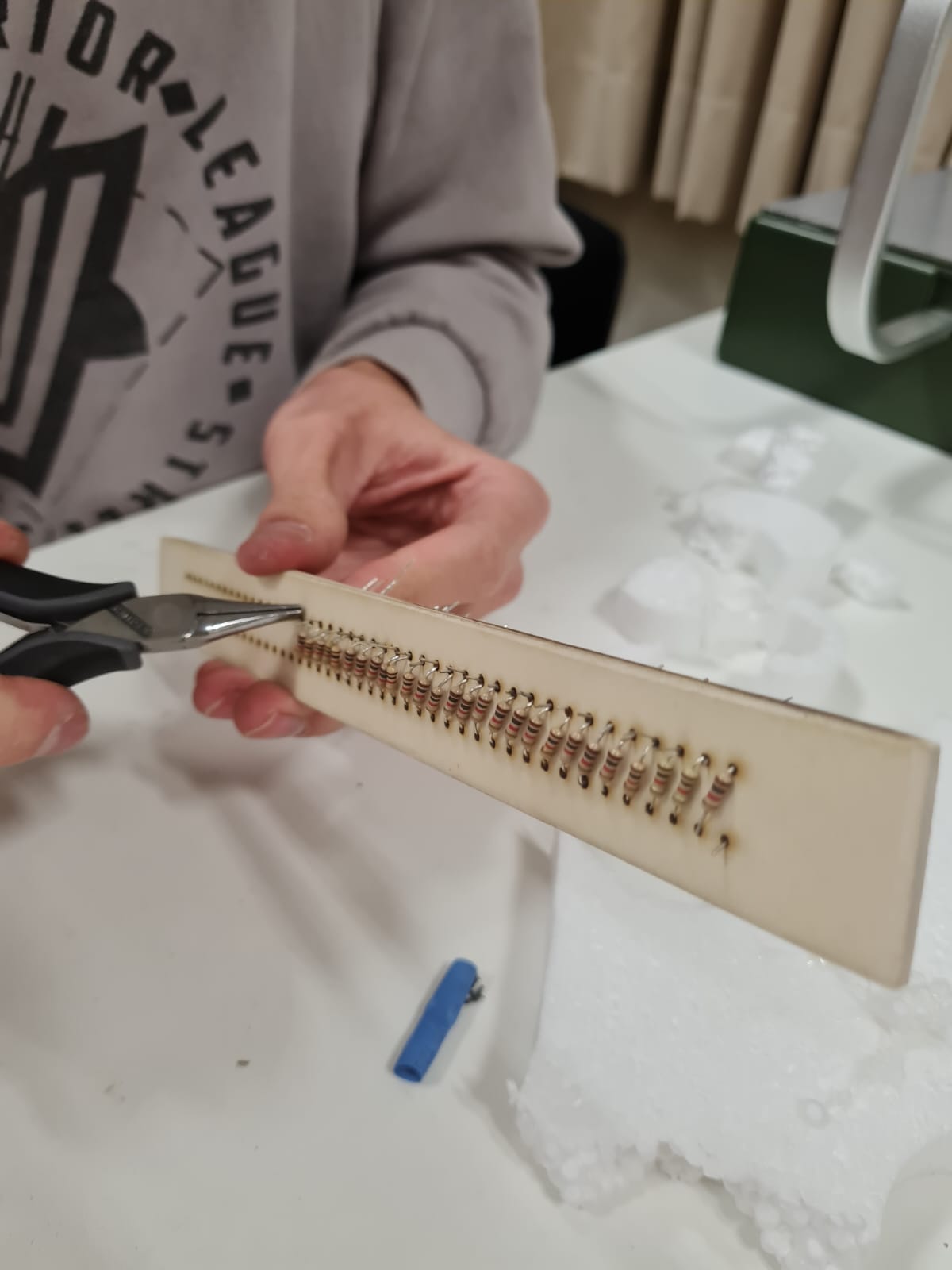
In der Zwischenzeit haben wir uns auch mit dem Eingabemedium, einer Olympia-Monika, beschäftigt. Hier war die Hürde die Erkennung der Tastenanschläge. Zunächst versuchten wir, Fillament als eine Art Leitungswiderstand zu verwenden, was sich aber als zu instabil für eine zuverlässige Erkennung der gedrückten Taste erwies. Daher entschlossen wir uns, eine eigene Platine zu löten, auf der Widerstände von je 1k Ohm aufgereiht sind. Über die Addition der Widerstände kann man jede Taste anhand ihrer Position genau bestimmen.
Zu Beginn haben wir geprüft, wie wir mit einem Arduino mehrere Motoren zeitgleich ansteuern können. Nach anfänglichen Schwierigkeiten verlief dies reibungslos, nach und nach kamen mehr Motoren hinzu, wir brauchten ja einen Roboterarm, der die Tasten mit ausreichender Kraft betätigt.

Schnell wurde uns jedoch klar, dass es mit dem Roboterarm, wie wir ihn uns vorgestellt hatten, eher nichts wird. Ein frei schwingender Arm wäre zu instabil und unpräzise gewesen. Aus der Traum?
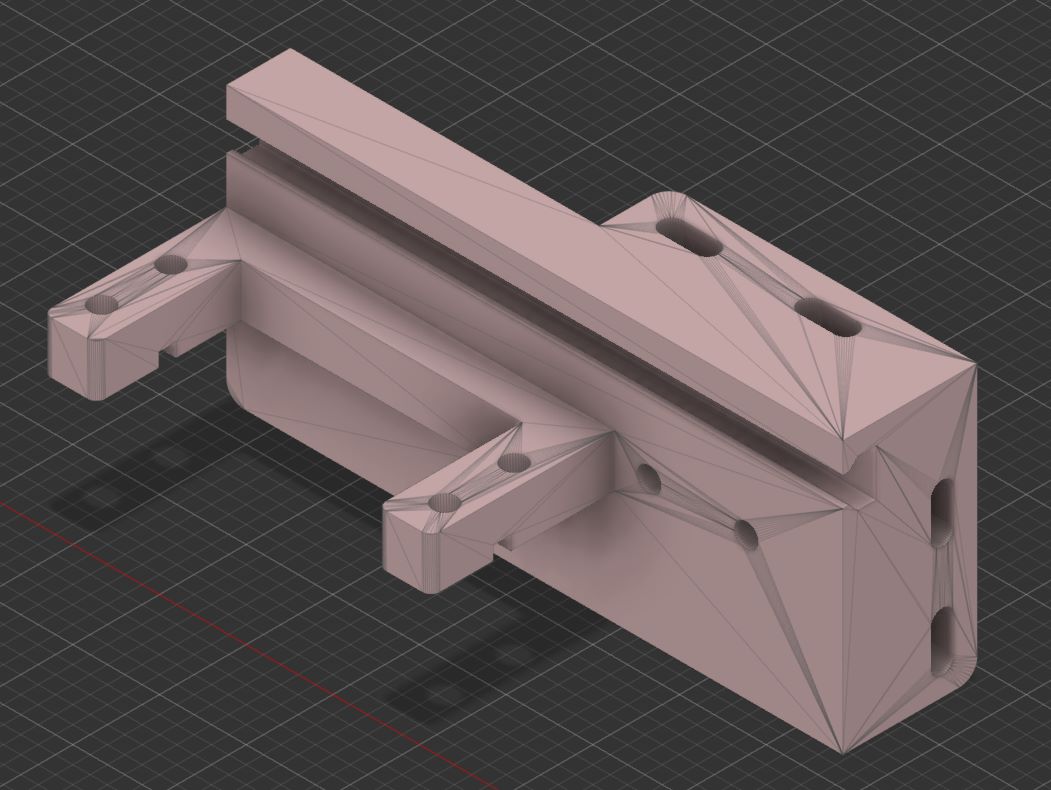

Alternativ haben wir nun begonnen, ein Gestell zu bauen, in dem wir die Koordinaten der Tasten wie bei einem 3D-Drucker ansteuern können. Die Tasten sind in einem Array angelegt, in dem die x-, y- und z-Koordinaten genau definiert sind. Gedrückt werden sie mit einem schweren und sich schnell nach unten bewegenden Stift. Dieser Stift ist durch eine Nylonschnur mit einem Rad verbunden, das ihn nach Betätigung einer Taste durch Aufrollen der Schnur wieder nach oben zieht. Der Stift wird durch ein langes Kugellager in Position gehalten, sodass die Ansteuerung der richtigen Taste treffsicher ist.
Ergebnis: Die Schreibmaschine schreibt!