Interface Design 1
IOCON

Das Projekt IOCON beschäftigt sich mit der Frage, wie sich komplexe Robotiksteuerung über große Distanzen intuitiv gestalten lässt. Die Distanz von 384.400 Kilometern zwischen Erde und Mond, bildet dabei den konzeptuellen Rahmen unseres Projekts. Im Kurs Interface 1 untersuchten wir, wie sich die Funktionen eines Greifarmroboters auf einen physischen Controller übertragen lassen. Ziel war es, eine präzise, nachvollziehbare und möglichst intuitive Steuerung zu entwickeln. Das Ergebnis dieses Prozesses ist IOCON, ein speziell für die Erkundung der Mondoberfläche und die Sammlung von Gesteinsproben konzipierter Controller.
Ausgangslage & Use Case
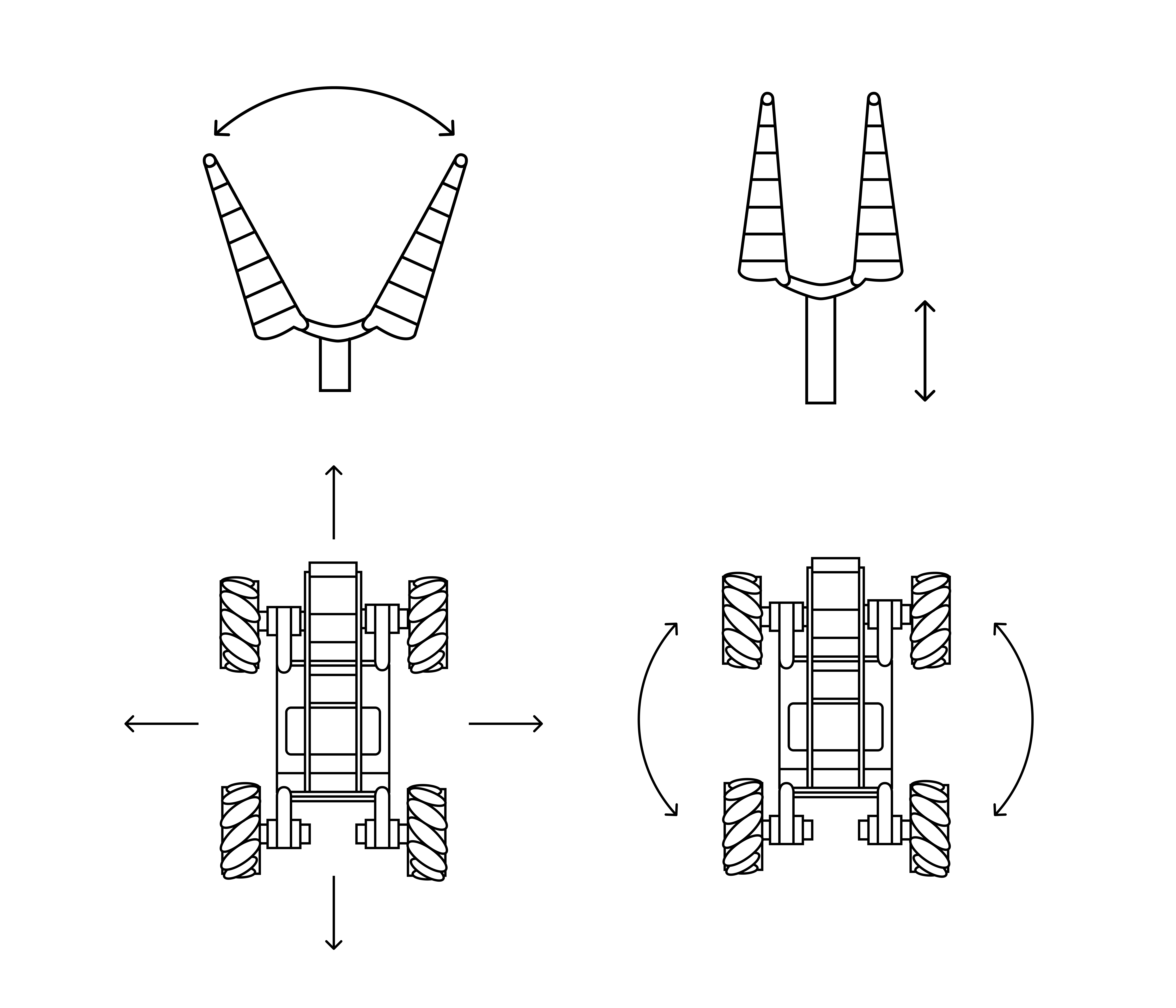
Ausgangspunkt des Projekts war die Frage, wie sich komplexe Roboterbewegungen so bündeln lassen, dass sie über ein einziges Interface kontrollierbar bleiben. Der Controller sollte zwei zentrale Funktionsbereiche abdecken: die Fortbewegung des Roboters (Links–Rechts, Vor–Zurück sowie omnidirektionaler Crab Walk) und die Steuerung des Greifarms (Öffnen, Schließen und vertikale Bewegung).
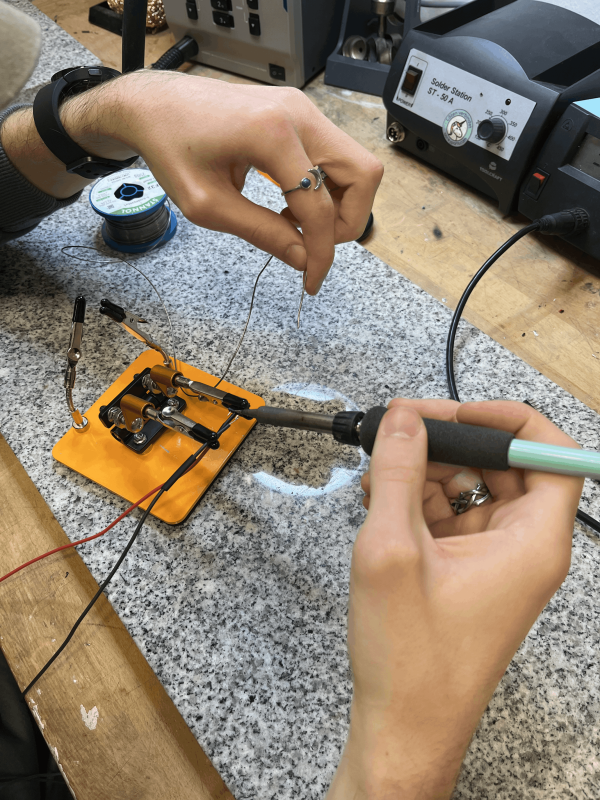
Zu Beginn eigneten wir uns ein grundlegendes Verständnis der Robotersteuerung an und testeten einzelne Funktionen mithilfe einfacher Arduino-Schaltungen. Um die Aufgabenstellung zu konkretisieren, definierten wir im Kurs Usability einen klaren Use Case: die ferngesteuerte Erkundung der Mondoberfläche aus einem Kontrollzentrum auf der Erde. Zielgruppe sind Fachkräfte der European Space Agency (ESA), insbesondere Missionsoperator:innen.
Prozess
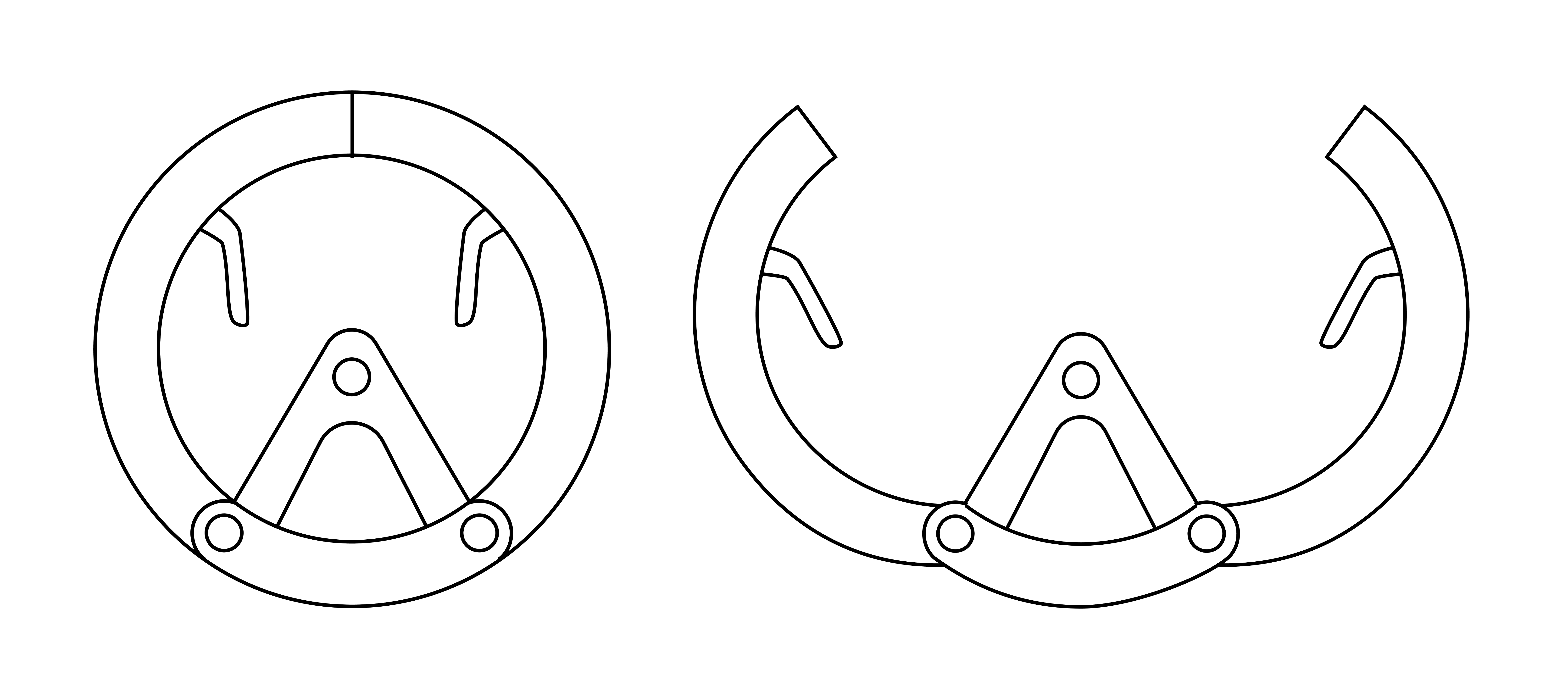
Mit der Festlegung des Use Cases begann der eigentliche Designprozess. In mehreren Crazy-8-Sessions entwickelten wir unterschiedliche Steuerungskonzepte. Besonders überzeugend war die Idee eines zweihändig gehaltenen, aufklappbaren Lenkrads, dessen Öffnungsmechanik den Greifarm des Roboters widerspiegelt. Dieses Konzept wurde schrittweise weiterentwickelt.
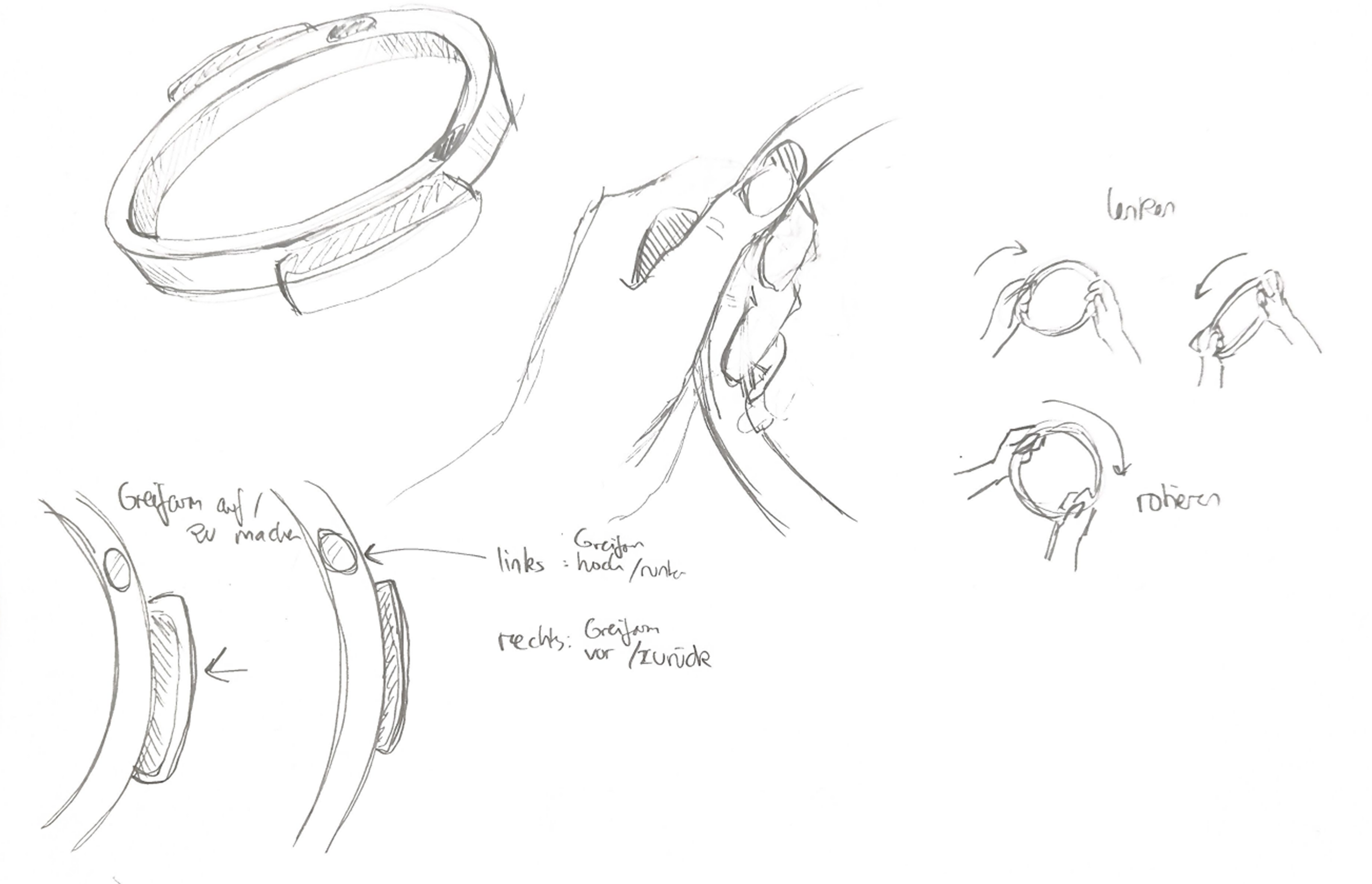
Ein zentrales Ziel war es, klassische Buttons möglichst zu vermeiden und stattdessen auf große, klar erkennbare Bewegungen zu setzen. Dadurch sollte jederzeit nachvollziehbar sein, welche Aktion der Roboter ausführt – ein wichtiger Aspekt im Hinblick auf mögliche Latenzen. Inspiration fanden wir unter anderem in Helikopter- und Flugzeugsteuerungen sowie Racing-Simulatoren.
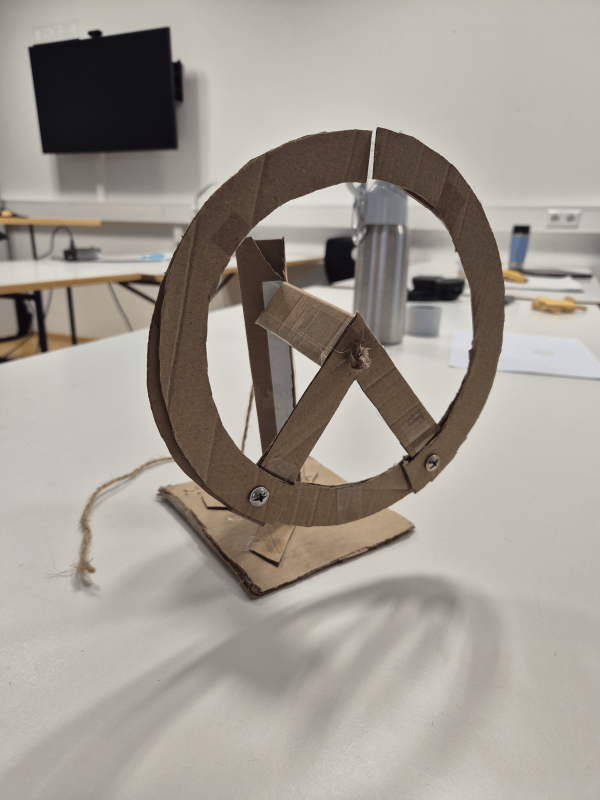
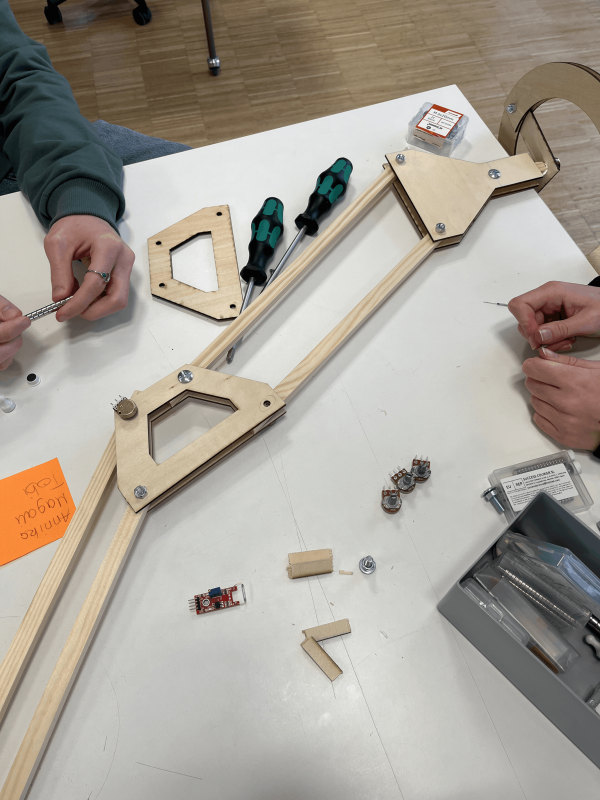
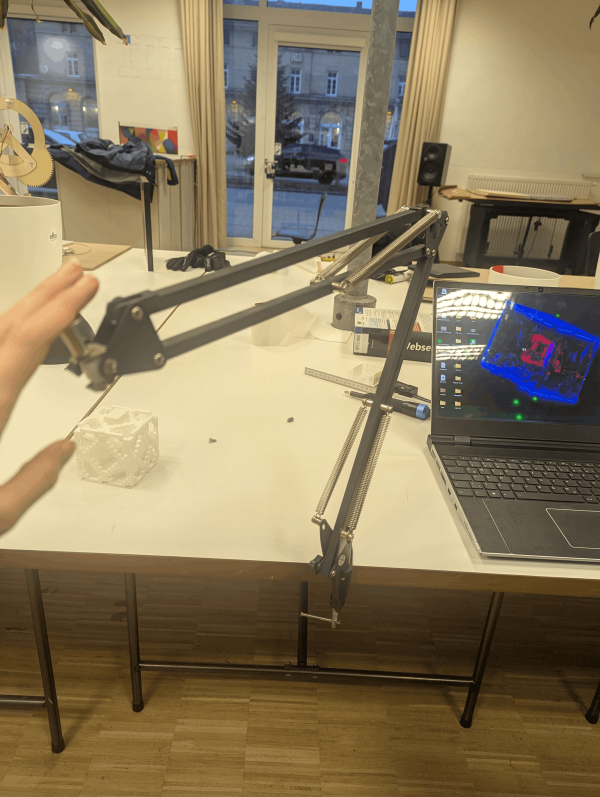
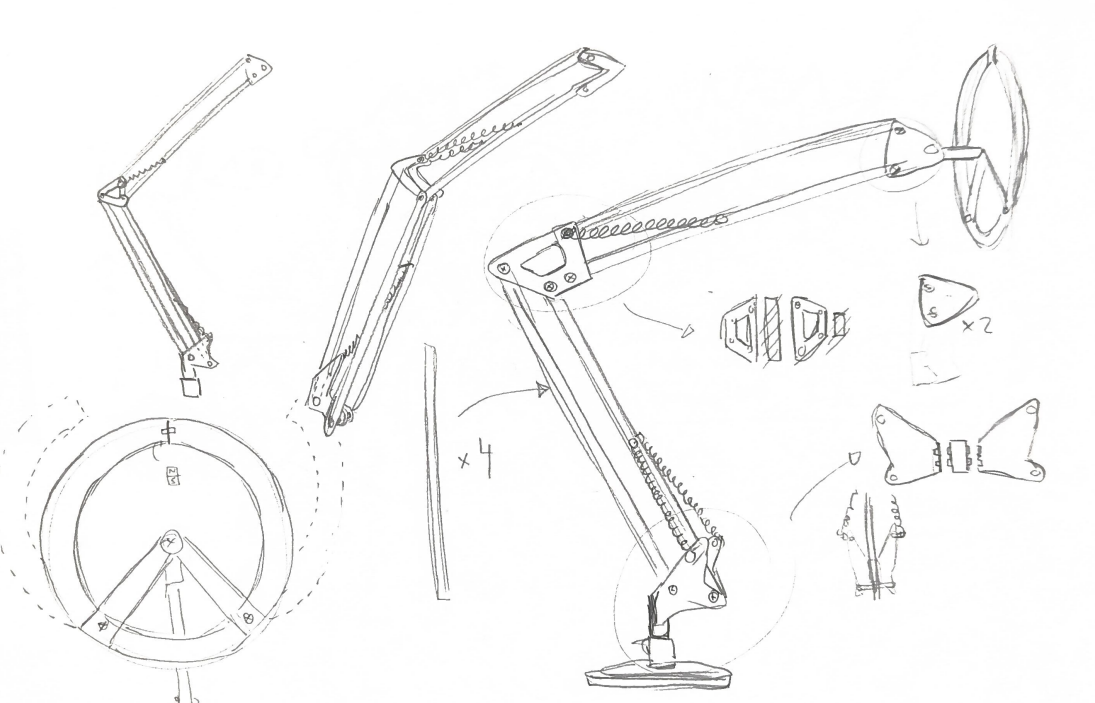
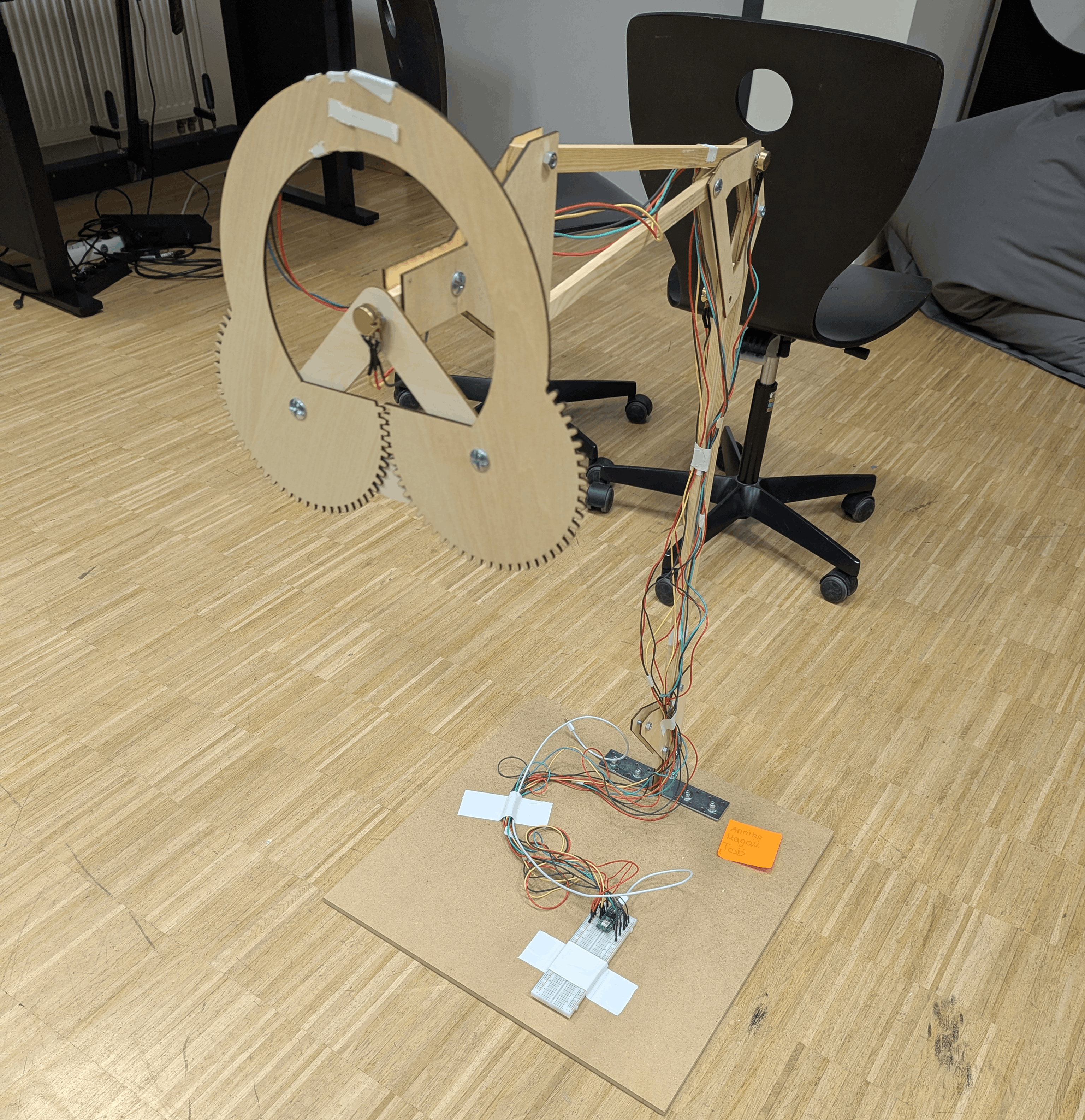
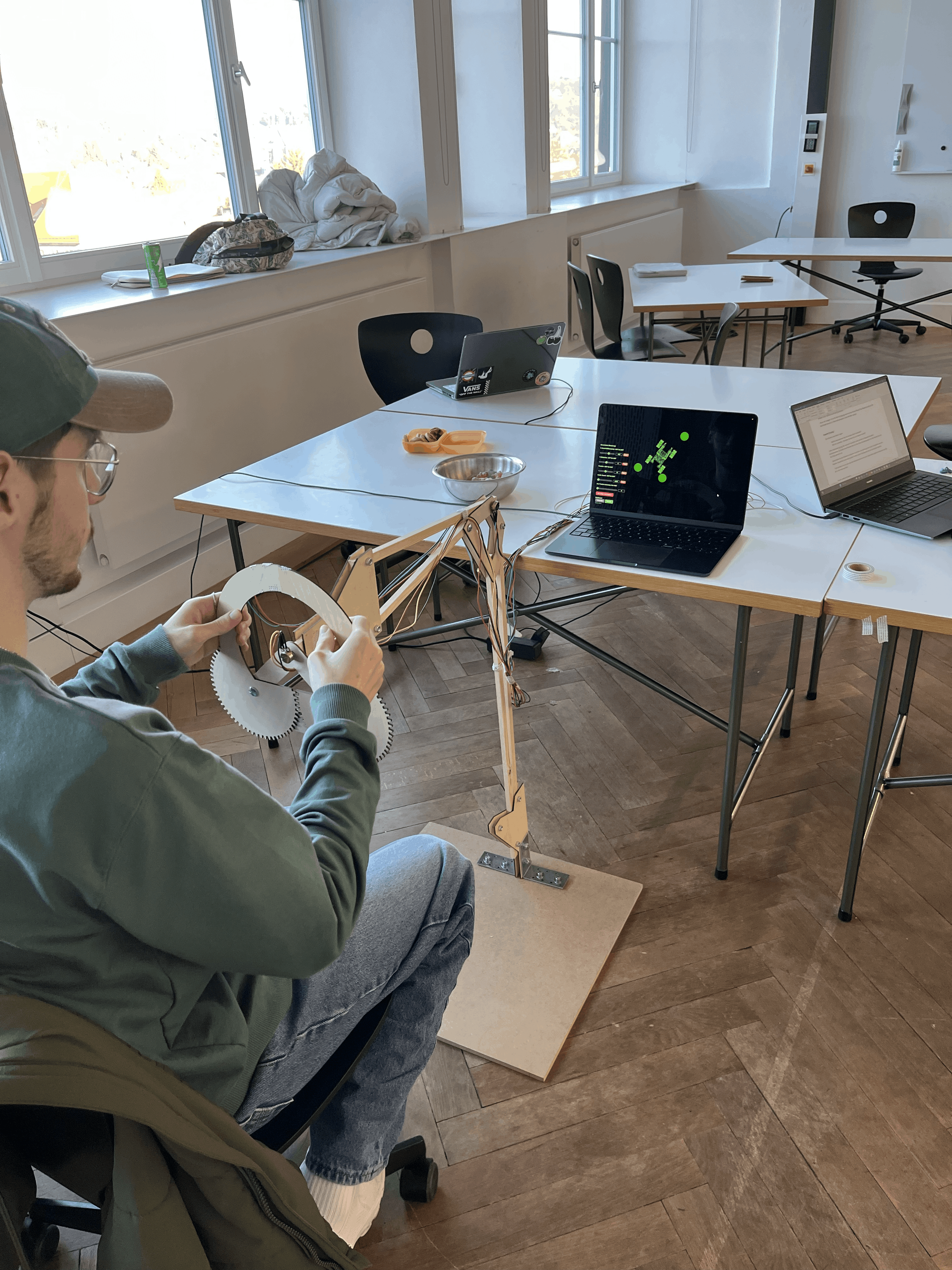
Erste Prototypen aus Pappe ermöglichten schnelle Tests der Mechanik. Darauf aufbauend entstand ein funktionsfähiger Holzprototyp mit einer Gelenkkonstruktion nach dem Parallelogramm-Prinzip, inspiriert von Lampenmechaniken. Die Bewegungen wurden über Potentiometer ausgelesen und auf eine Simulation gemappt. Gesteuert werden konnten Vor- und Rückwärtsbewegung, Rotation, Greifarmbewegung sowie ein erster Crab-Walk-Modus.
User Tests
Die ersten User Tests dienten der Überprüfung der Intuitivität des Controllers. Studierende der HfG testeten den Prototyp eigenständig und gaben anschließend Feedback. Dabei zeigte sich, dass die meisten Funktionen schnell verstanden wurden, der Moduswechsel für den Crab Walk jedoch kaum intuitiv war. Weitere Kritikpunkte betrafen die hohe Empfindlichkeit der Steuerung sowie unklare Griffpositionen.
In einem zweiten, fokussierten User Test wurden alternative Crab-Walk-Steuerungen erprobt. Getestet wurden Pedale, eine zusätzliche Gelenkachse und Schalter am Lenkrad. Als klarer Favorit setzten sich die Schalter am Lenkrad durch, da sie am verständlichsten und fehlerärmsten waren.
Finaler Prototyp
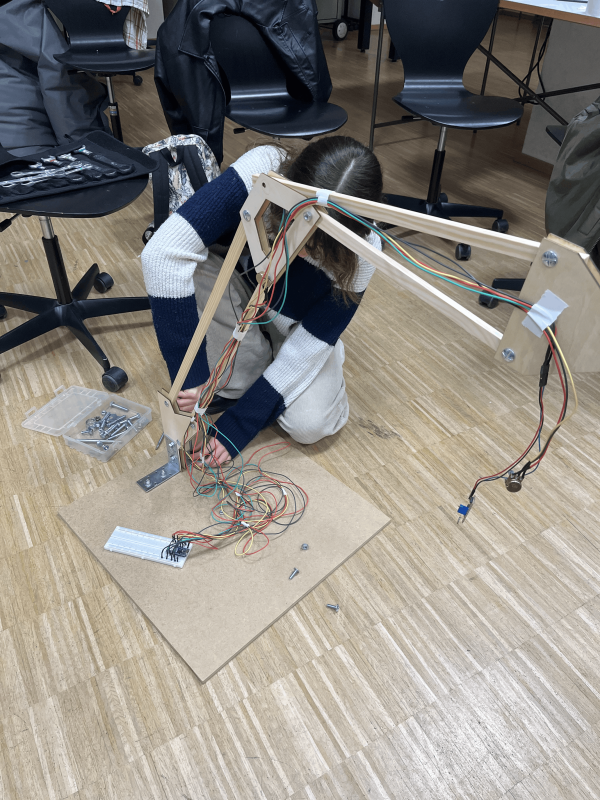
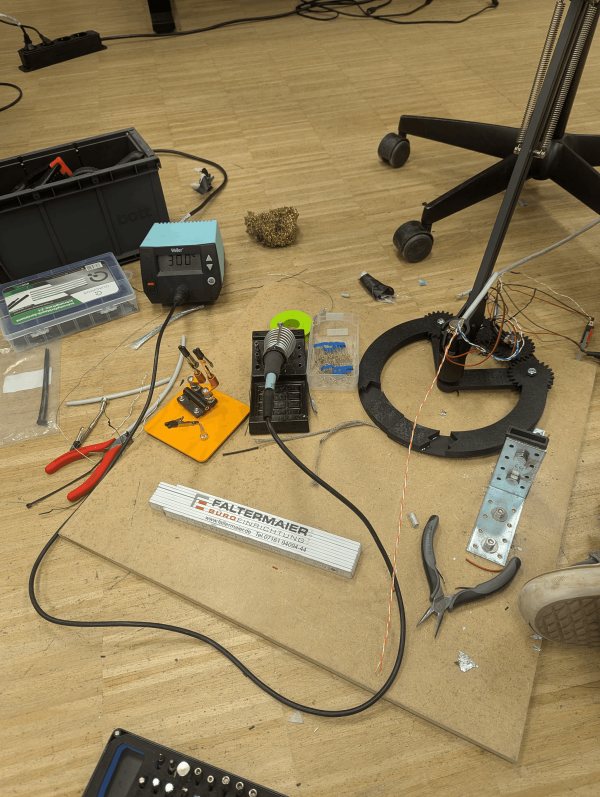
Da sich der Holzprototyp als instabil erwies, entwickelten wir einen neuen, robusteren Funktionsprototyp. Mithilfe von 3D-Druck konnten technische Komponenten präziser integriert und die Stabilität deutlich verbessert werden. Zusätzlich nutzten wir das Gestell einer Lampe, dessen Gelenke und Federn sich gut erweitern ließen.
Die Potentiometer wurden nun stabil auf Achsen befestigt, der Reed-Sensor durch ein Potentiometer ersetzt und die Lenkradrotation über eine gelagerte Achse ausgelesen. Die finale Crab-Walk-Steuerung erfolgte über zwei Mikroswitches am Lenkrad. Nach mehreren Iterationen gelang es zudem, eine zuverlässige Rückfederung des unteren Gelenks zu realisieren.




Designprototyp & Ausblick
Parallel zum Funktionsprototyp entstand ein Designprototyp, der Nutzungsszenario und Ergonomie stärker berücksichtigt. Lenkrad, Sitz und Monitor orientieren sich an bekannten Fahrzeug- und Kontrollsystemen. Materialwahl und Formgebung unterstützen eine intuitive Handposition und klare Funktionszuordnung.




Magali Wilhelm, Annika Feist, Tobias Wallisch
BetreuungProf. Michael Schuster, Anna Raveling
Tags