Interface Design 1
Lean - Move with Balance

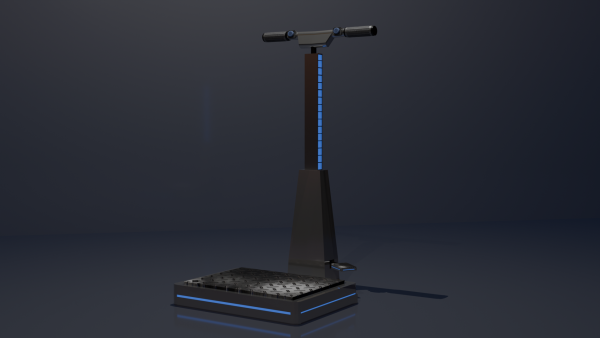
„Lean-Move with Balance“ ist ein Controller zur Steuerung eines Greifarmroboters. Die Steuerung basiert auf Körperbalance und Handbewegungen und ist in zwei Hauptbereiche aufgeteilt: Standplattform und Lenkgriff.
Standplattform
Die Fortbewegung des Roboters wird über eine Balance-Plattform gesteuert.
- Nach vorne lehnen → Roboter fährt vorwärts
- Nach hinten lehnen → Roboter fährt rückwärts
- Zur Seite lehnen → Roboter bewegt sich nach links oder rechts
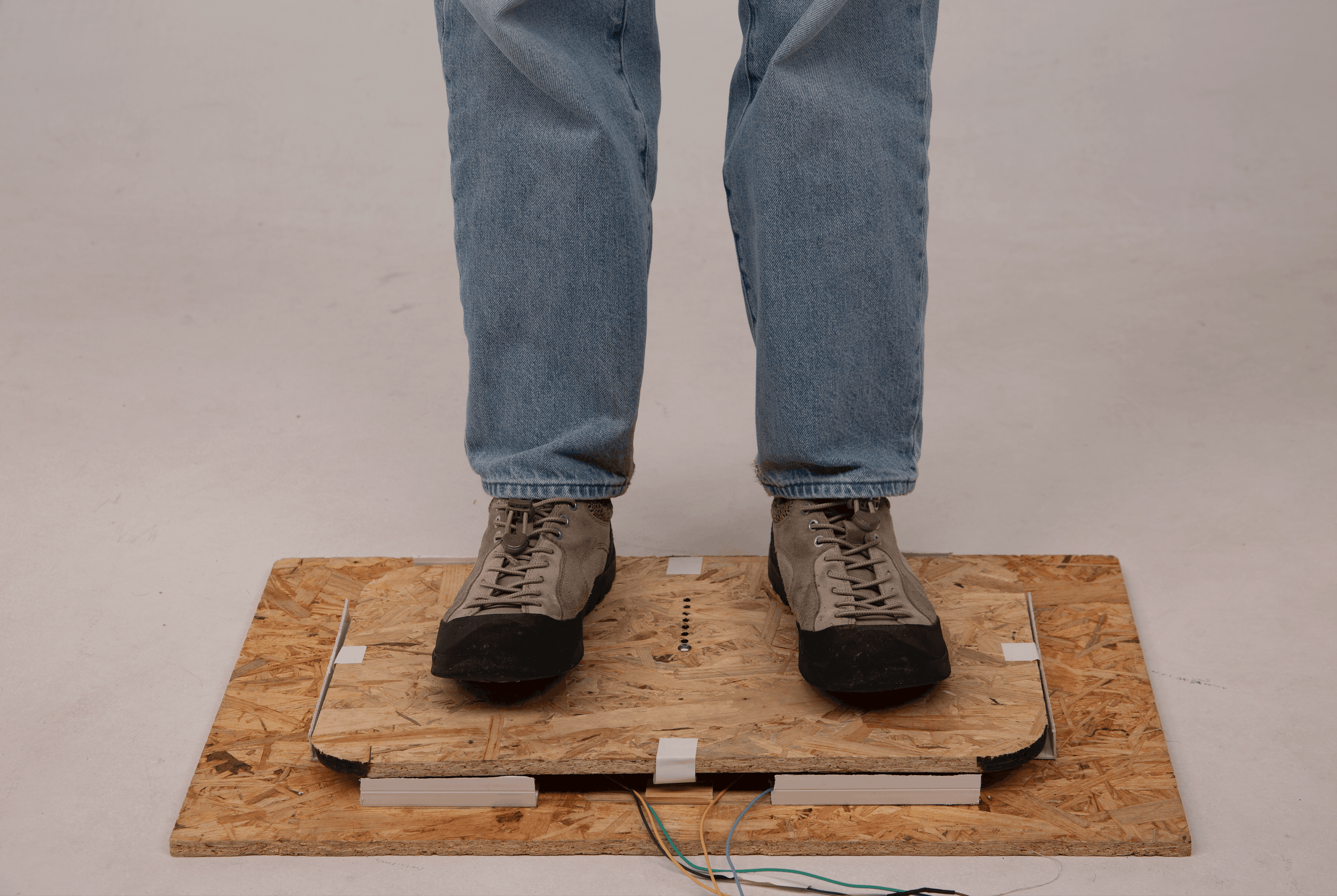
Technisch wird die Neigung nicht über Sensoren gemessen, sondern über mechanische Buttons unter der Plattform. Sobald Gewicht in eine Richtung verlagert wird, drückt die Plattform auf einen Button, der das jeweilige Bewegungssignal auslöst. Eine definierte Nullposition sorgt dafür, dass der Roboter stehen bleibt, wenn kein Druck ausgeübt wird.
Lenkgriff
Der Lenkgriff steuert zusätzliche Funktionen, die nicht über Balance abgebildet werden können:
- Rotation des Roboters → Drehen des Lenkers rotiert den Robote eigene Achse .
- Greifarm öffnen und schließen →Öffnen des Greifarms über Daumen-Button am Griff
- Greifarm aus- und einfahren → Drehen des Lenkgriffes fährt den Greifarm hoch und runter
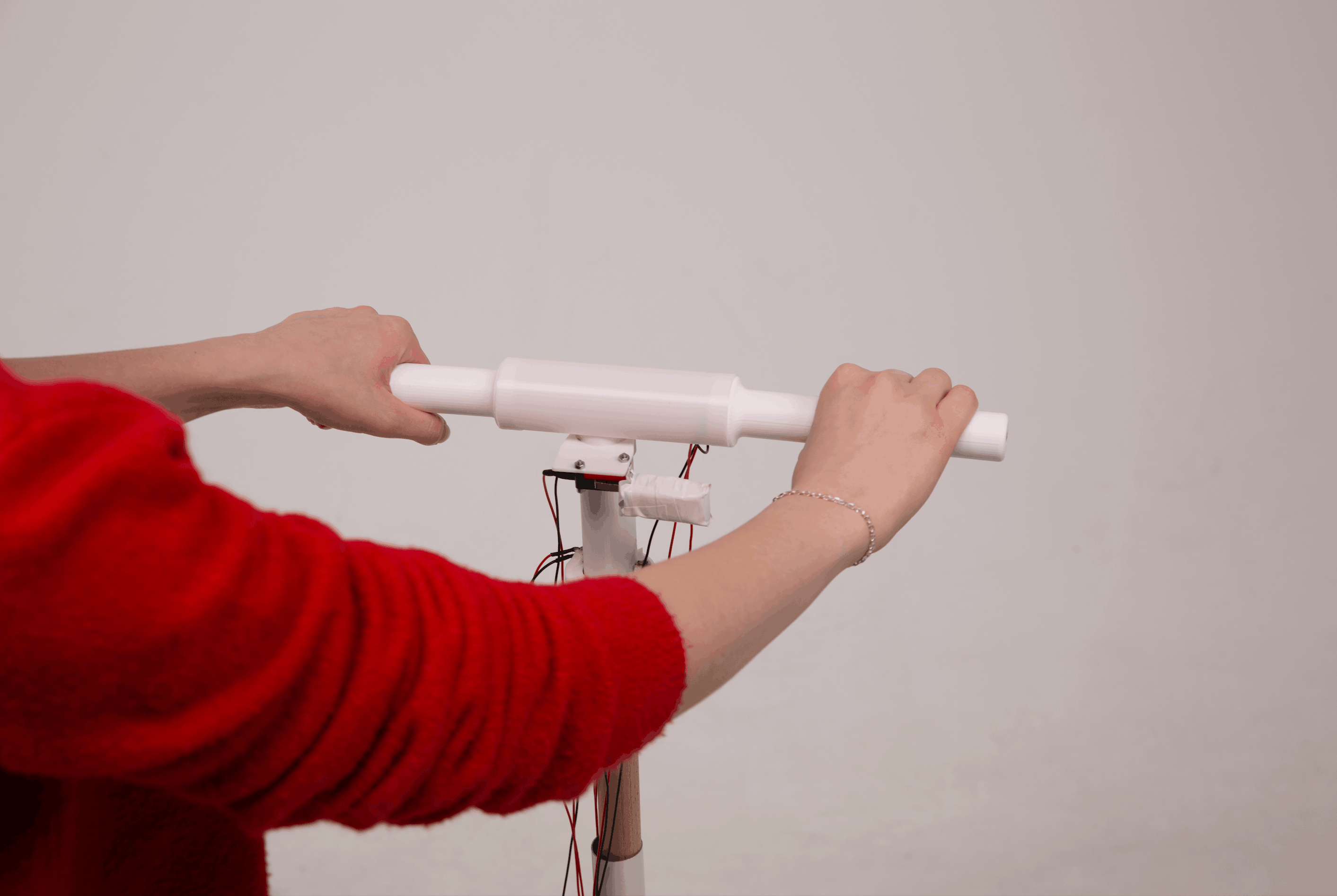
Die Bewegungen für Rotation und das Greifarm aus- und einfahren wird über Buttons ausgelöst, die durch kleine Vorsprünge im Griff gedrückt werden. Bei der Drehung drückt der Vorsprung gegen die einzelnen Buttons. Bei der Drehung des Lenkers bringen Federn den Griff nach der Bewegung automatisch in die Mittelposition zurück, wodurch ein klarer Nullpunkt entsteht.
User Tests
Auch wurden im Verlauf der Entwicklung mehrere iterative User-Tests mit unterschiedlichen Testpersonen durchgeführt. Die Nutzer*innen bedienten den Controller ohne vorherige Erklärung der Nutzungsfunktionen.
Dadurch ließen sich einige Pain-Points bei unserem Controller feststellen:
- Die Rotation war zu empfindlich
- Beim Greifarm kam das Feedback zu spät und unklar
- Die Höhe des Controllers war zu hoch
Nachdem wir diese Probleme überarbeitet und verbessert hatten, folgte auch eine zweite Testrunde.
Bei diesem kleinen User Test sollten die Nutzer*innen den Controller einfach Testen, wie er sich anfühlt zu benutzen.
Als verbleibender Punkt wurde ein fehlender Start-/Stop-Mechanismus, der das Auf-und-Absteigen erleichtern würden, identifiziert.
Zukünftig könnte der Controller durch zusätzliche Sicherheitsfunktionen wie einen Start-/Stop-Mechanismus noch benutzerfreundlicher werden. Auch die Präzision der Greifarmsteuerung lässt sich weiter optimieren.

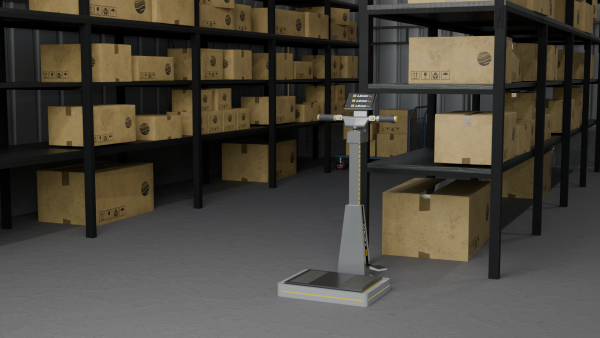
Usecase
Der Controller wird als Steuereinheit für einen Roboter in einer automatisierten Lagerhalle eingesetzt. Eine Bedienperson steht auf der Balance-Plattform und steuert den Roboter. So kann der Roboter präzise und sicher durch die Lagerhalle navigiert, Waren aufnehmen und an anderer Stelle ablegen, ohne komplexe Bedienoberflächen oder klassische Steuerpulte nutzen zu müssen. Das Design ist deshalb bewusst robust, reduziert und industriell gehalten. Geometrische Formen und eine stabile Standplattform sorgen für Sicherheit und Langlebigkeit.
Move with Balance zeigt, wie körperliche Interaktion und Technik zu einer natürlichen, recht intuitiven Steuerung von Robotik verschmelzen können.
Aurelia Eidemiller, Ajana Windisch, Shilei Xu
BetreuungProf. Michael Schuster, Anna Raveling
Tags