Interface Design 1
WhipIt

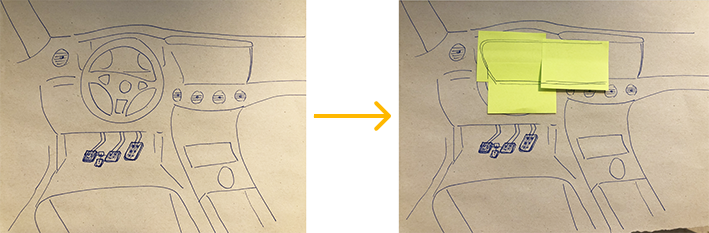
Im Kurs Interface Design 1 des zweiten Semesters Interaktionsgestaltung bestand die Aufgabe darin, ein neues Konzept für die Steuerung von Fahrzeugen zu entwickeln und schlussendlich als Funktionsprototypen mit Hilfe von Arduino technisch zu realisieren. Ziel der Veranstaltung war es, ein Videorennspiel mit diesem Endprodukt steuern zu können.


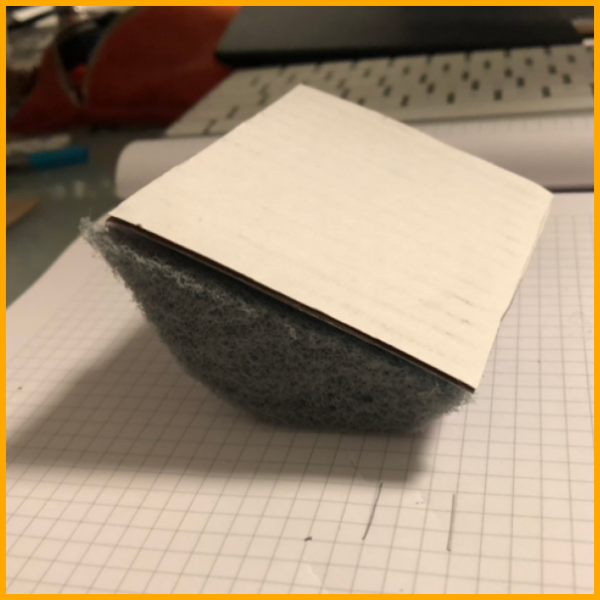
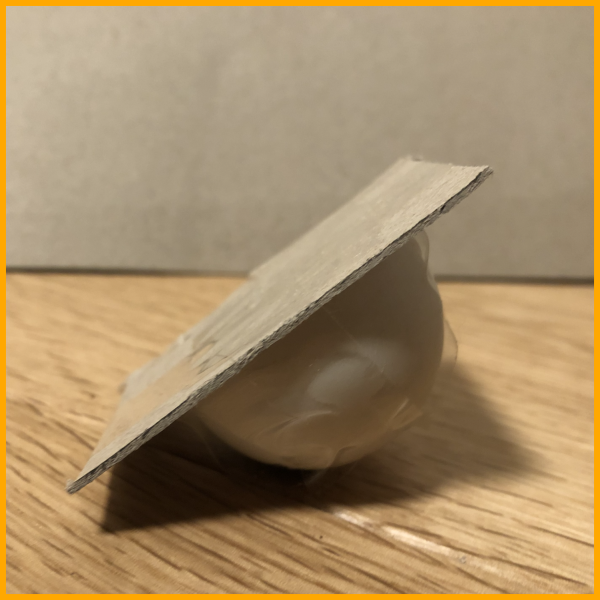
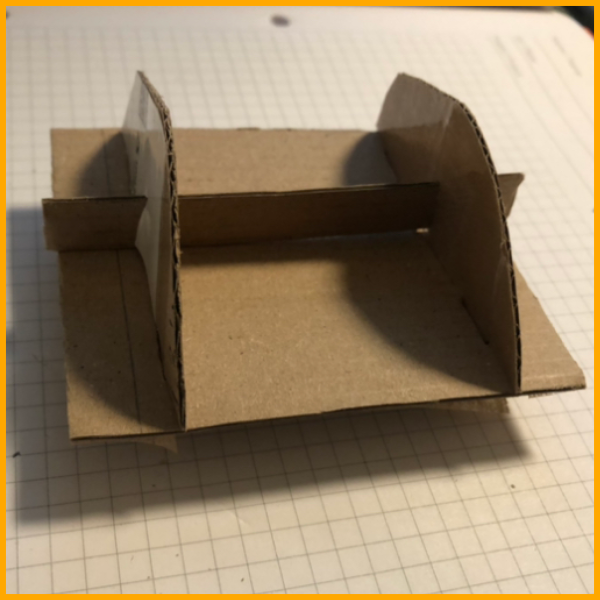
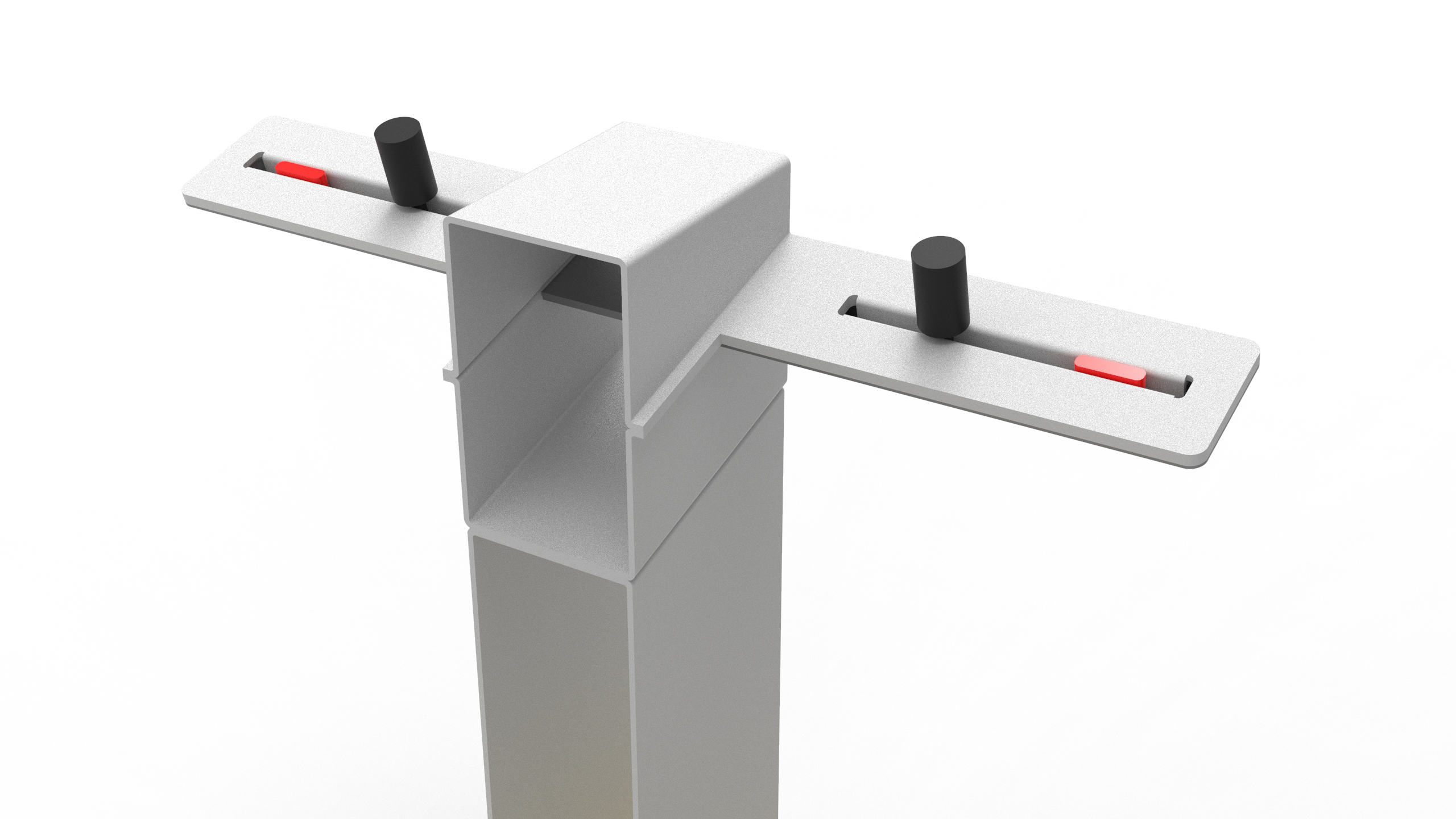
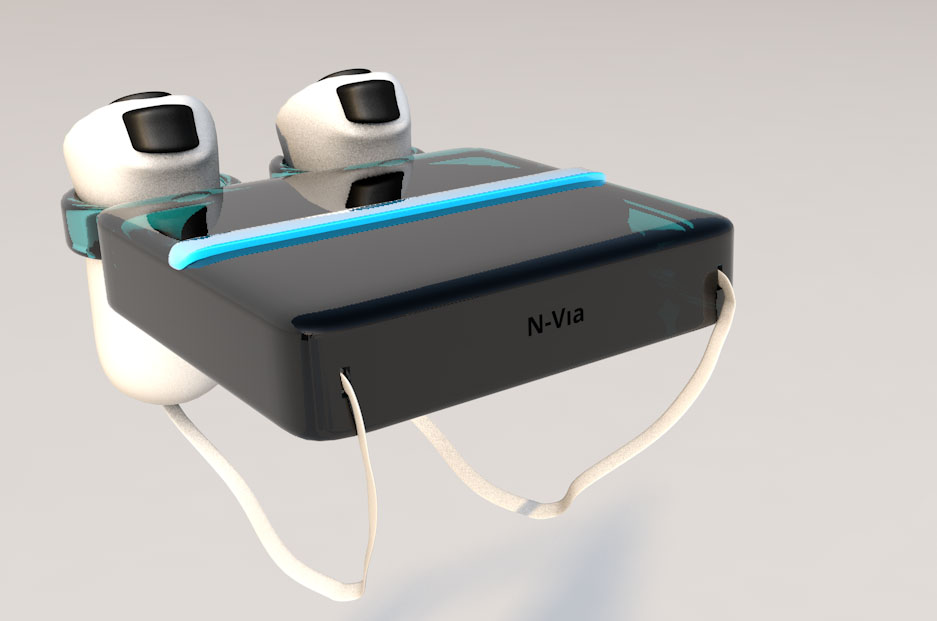
In unserem Projektverlauf zeigte sich anhand der ersten Skizzen, Entwürfe und Prototypen schnell, dass unser Endprodukt ausschließlich mit den Füßen gesteuert werden soll. Beim fertigen Prototypen handelt es sich um eine Doppelwippe, mit welcher man durch Links- und Rechtsneigung lenken kann und mittels zwei miteinander verbundenen Padalen, auf welchen sich die Füße stets befinden, be- beziehungsweise entschleunigt der Nutzer das Fahrzeug.


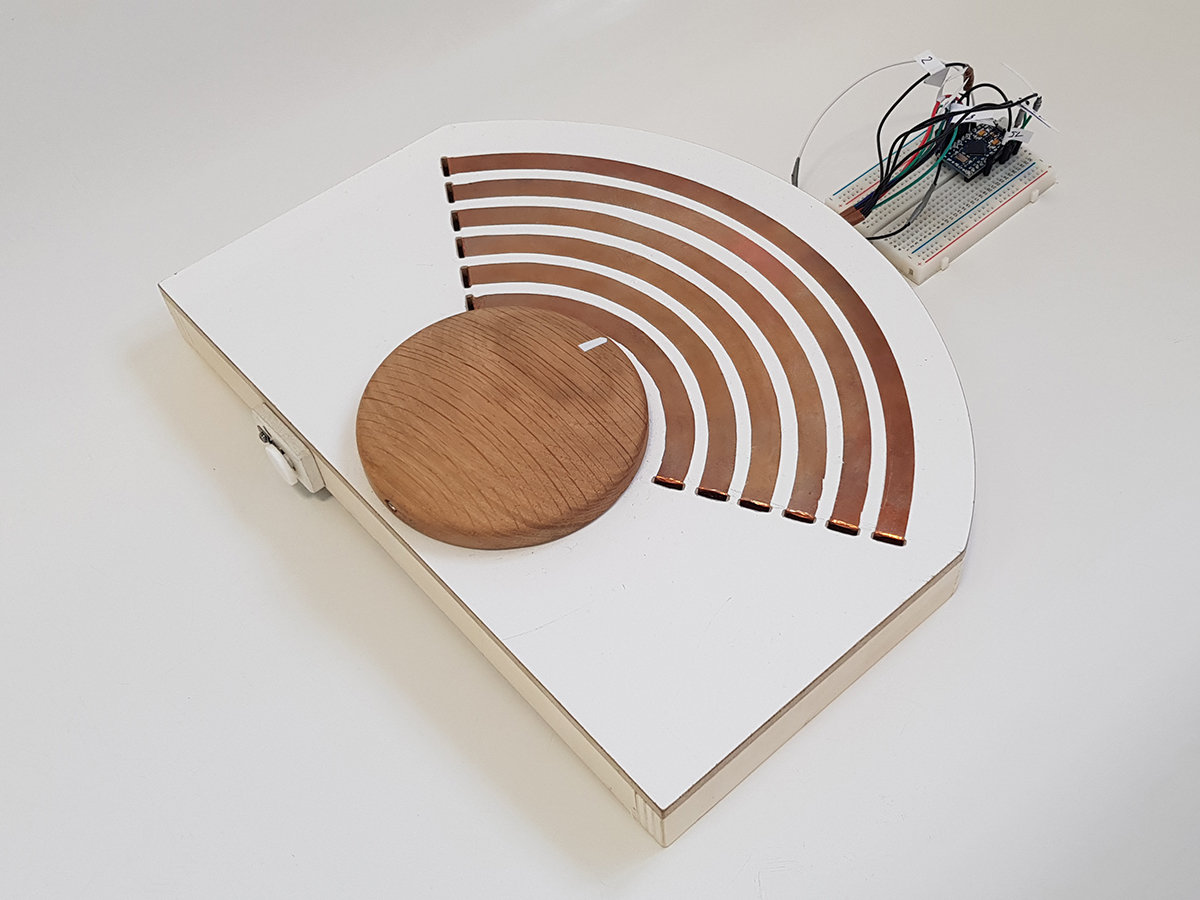
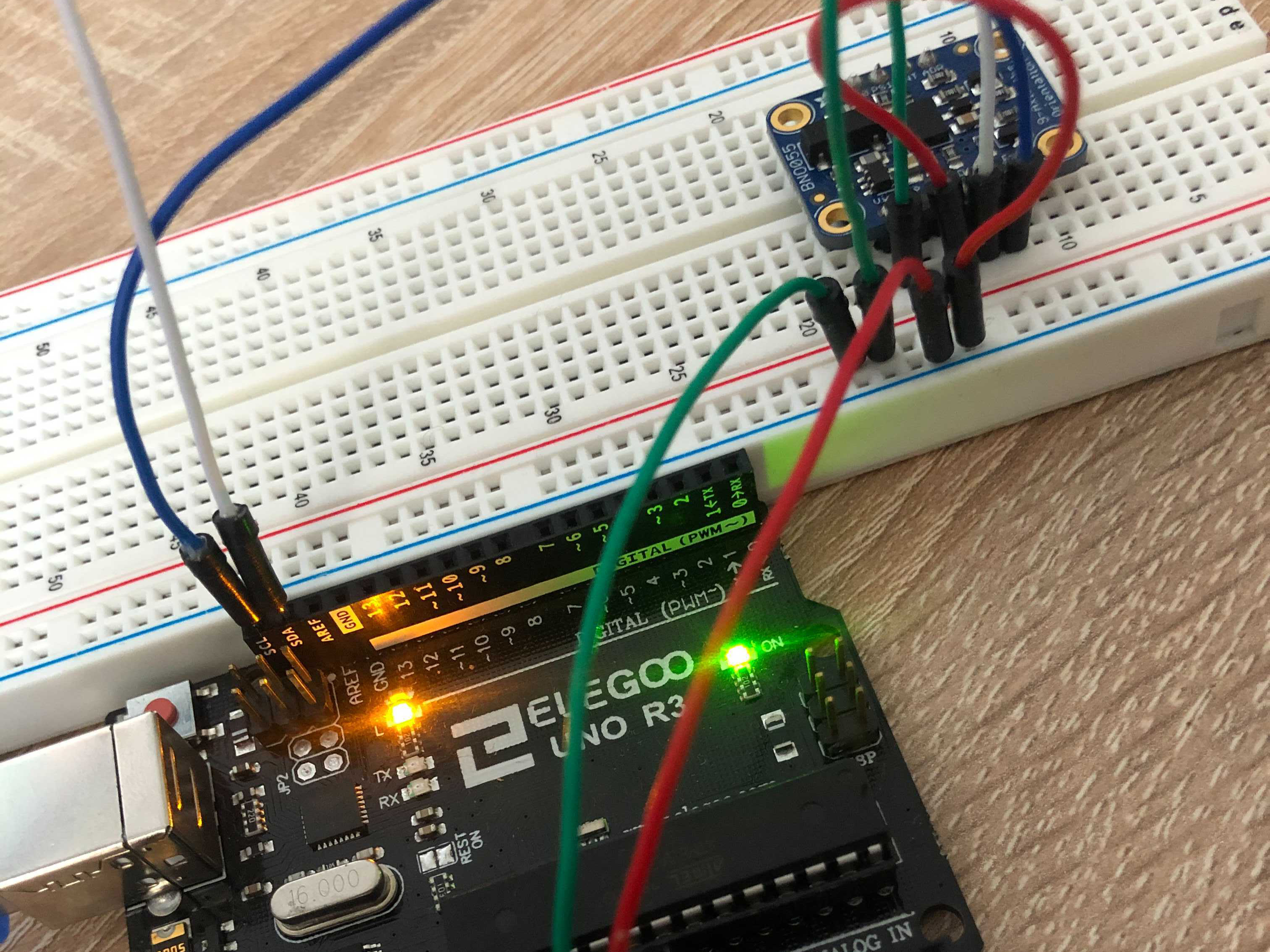
Um den Funktionsprototypen im Spielkontext nutzen zu können, mussten wir geeignete Arduino-Komponenten finden. Da unser Prototyp auf einem Doppelwippenprinzip basiert, reichte für die Umsetzung ein einziger Gyro-Sensor (Gyroskop). Dieser wird unterhalb eines Pedals angebracht und erhält somit die Neigungswerte in jedem Zustand (Gas geben, links/rechts lenken,…).
Vanessa Pieronczyk, Alina Zimmermann, Alisa Bogukanin
BetreuungProf. Michael Schuster, Prof. Carmen Hartmann-Menzel
Tags