Interface Design 1
Wheeloo

Für das Projekt Interface Design wurde dieses Semester die Aufgabe gestellt, einen Controller zum steuern eines Fahrzeuges zu entwerfen. Am Ende sollte jede Gruppe einen funktionierenden Prototypen haben, um damit ein einfaches Racing Spiel steuern zu können. Anhand des Funktionsprototyps haben wir dann ein Designprototyp entwickelt.
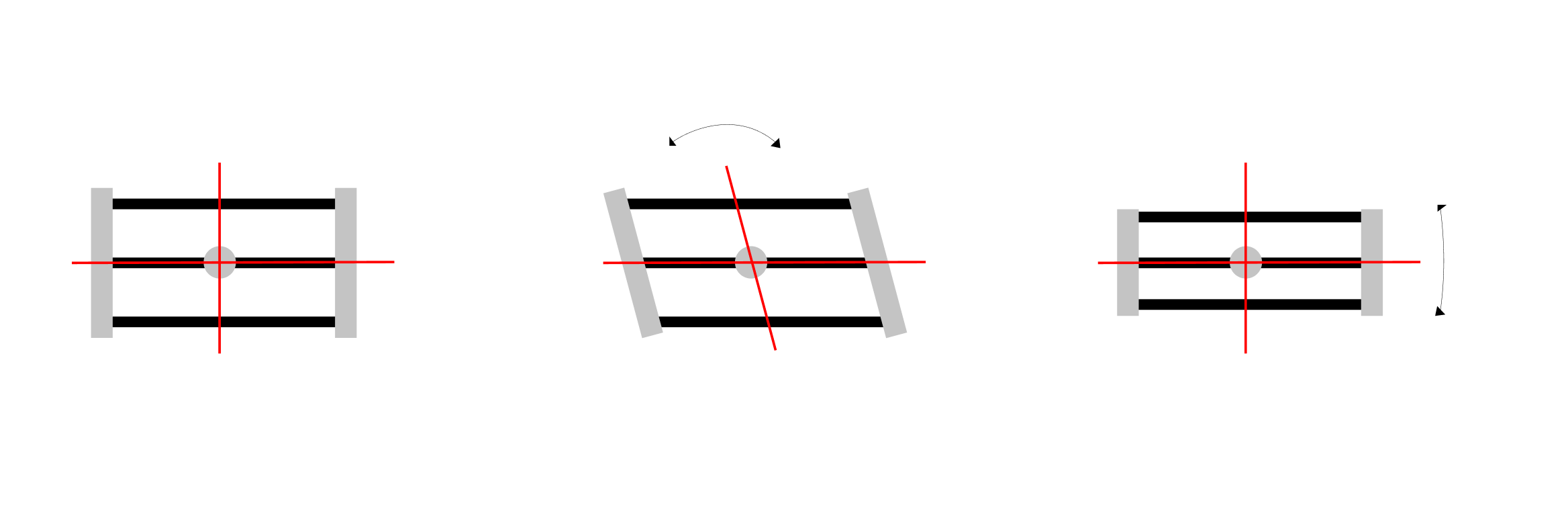
Aus unseren ersten Konzepten stach die Idee heraus einen Gyrosensor, in einer katanischen Aufhängung, als Eingabequelle zu verwenden, da es hiermit möglich ist den Drehpunkt nicht unterhalb, wie bei einem Joystick, sondern mittig der Hand zu platzieren. Durch das nach vorne Neigen wird Gas gegeben und umgekehrt gebremst. Wird nach Links beziehungsweise Rechts geneigt, steuert das Fahrzeug in die jeweilige Richtung.
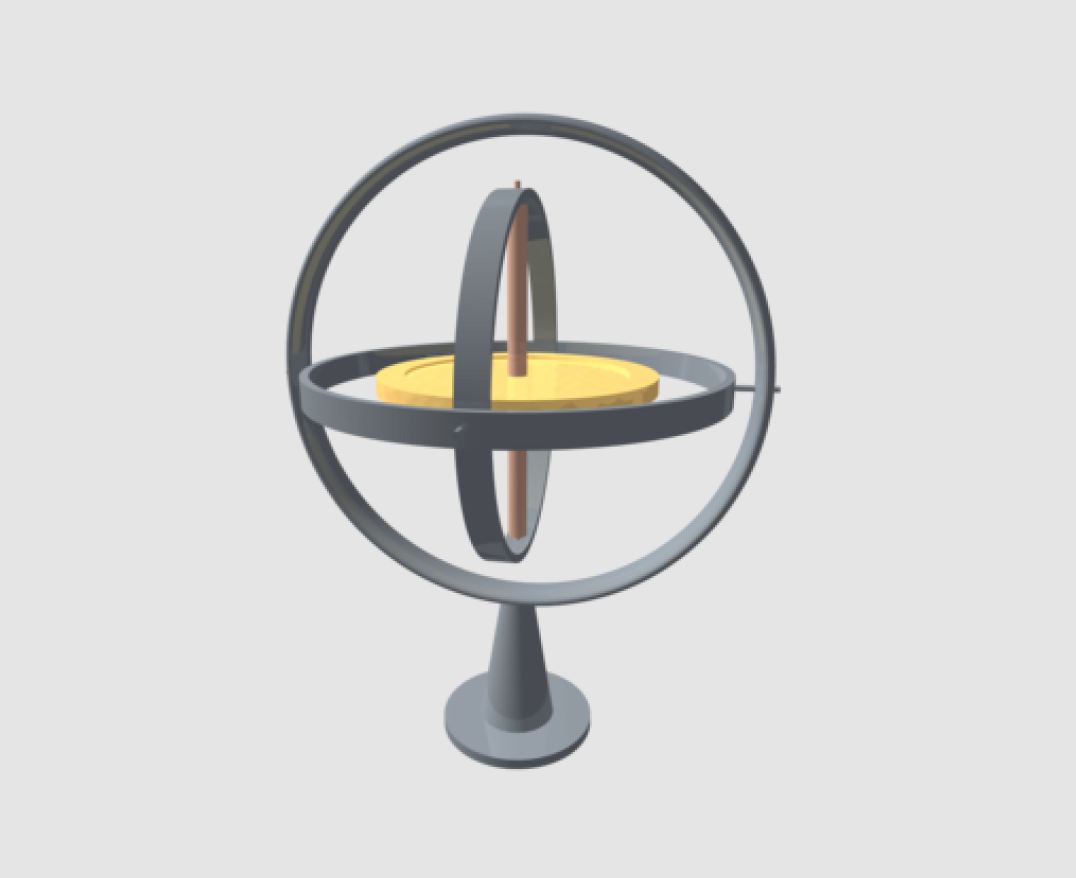
Mit einfachen Mitteln entstand unsere erstes Versuchsmodell.

Probanden haben diesen Prototyp getestet und wurden daraufhin befragt.


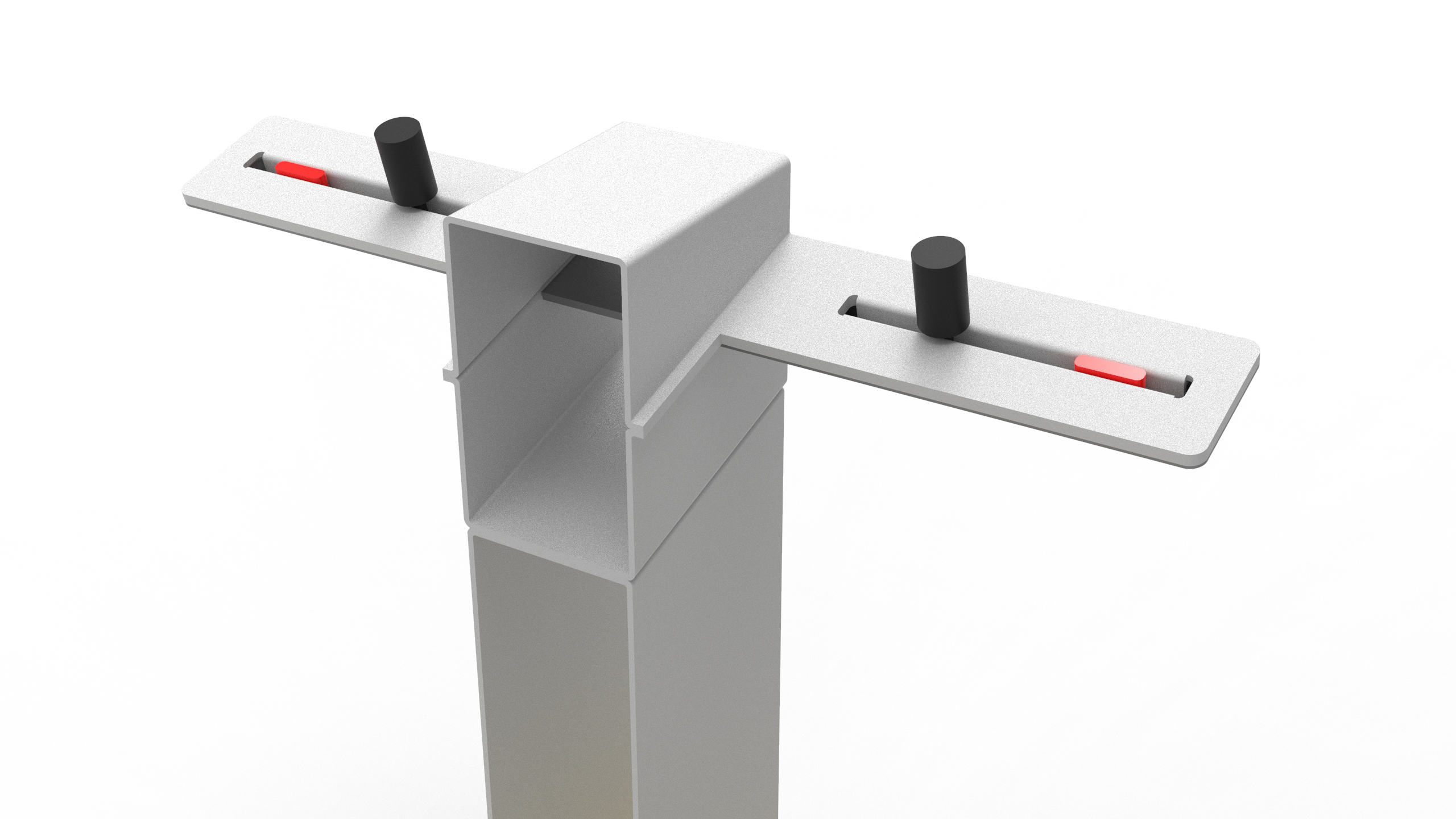
Bei dem Testing stellten wir fest, dass eine Hand nicht die nötige Kontrolle über das Fahrzeug gewährleistet. So überarbeiteten wir das Konzept des Controllers, wobei der Drehpunkt nach wie vor mittig in der Hand platziert bleibt aber die Steuerung zweihändig wird.
Aufbauend auf den Entwurf modellierten wir die benötigten Teile am PC, um sie anschliessend 3D drucken zu können.

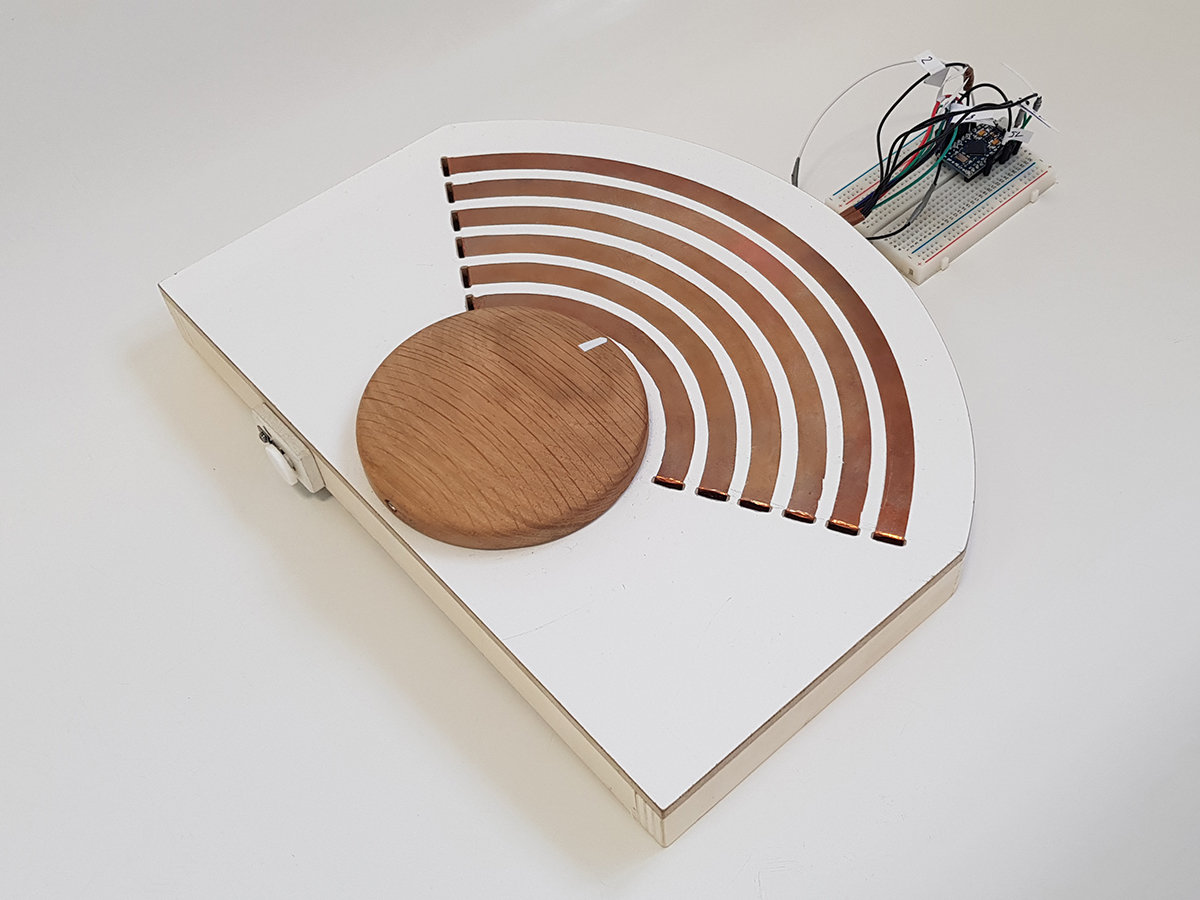
Nachdem der Gyrosensor an den Funktionsprototypen angeschlossen war, und über ein Arduinoboard programmiert war, gab dieser Werte aus. Diese Werte konnten nun als Spielsteuerung umgerechnet werden.
Hier nun der fertige Funktionsprototyp, getestet mit einem Video Spiel:
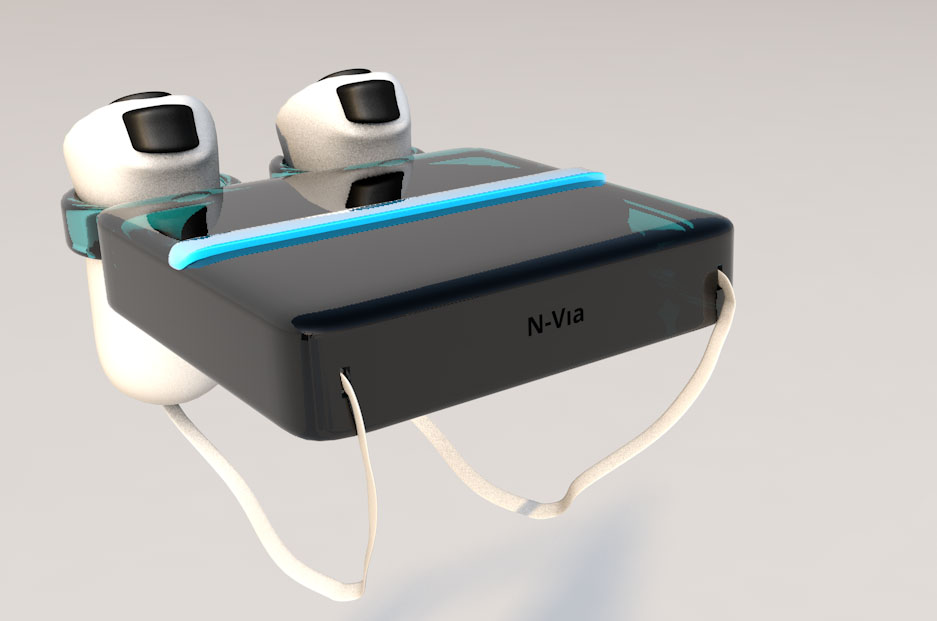
Hier sehen Sie unseren Designprototyp.

Max Schindler Maurice Vater Felix Weber
BetreuungProf. Michael Schuster, Prof. Carmen Hartmann-Menzel
Tags