Interface Design 1
intersection
Im Kurs Interface Design 1 bestand die Aufgabe darin, ein neuartiges Steuersystem für Videospiele im automotiven Kontext zu entwickeln. Das Konzept wurde mithilfe eines Arduino-Funktionsprototypen realisiert.

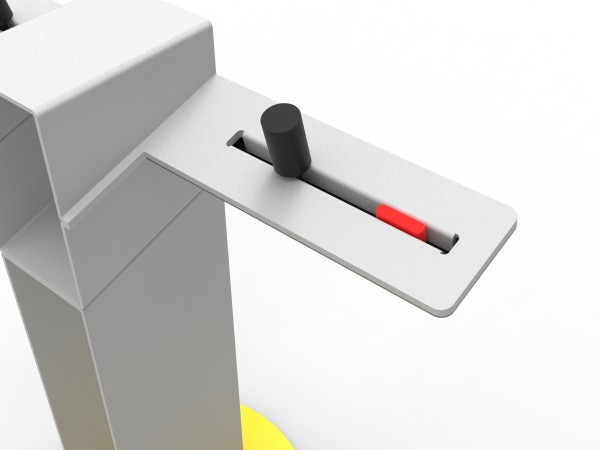
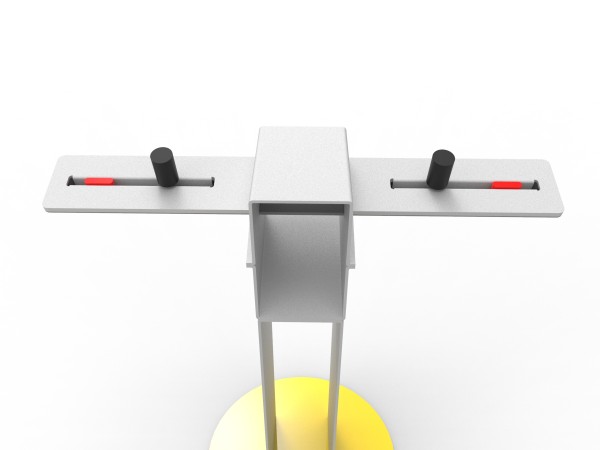
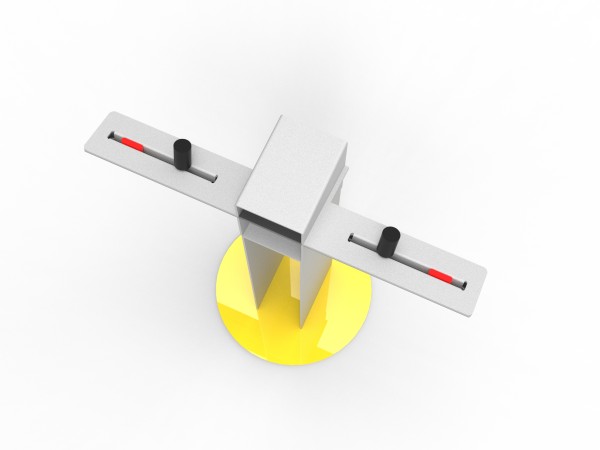
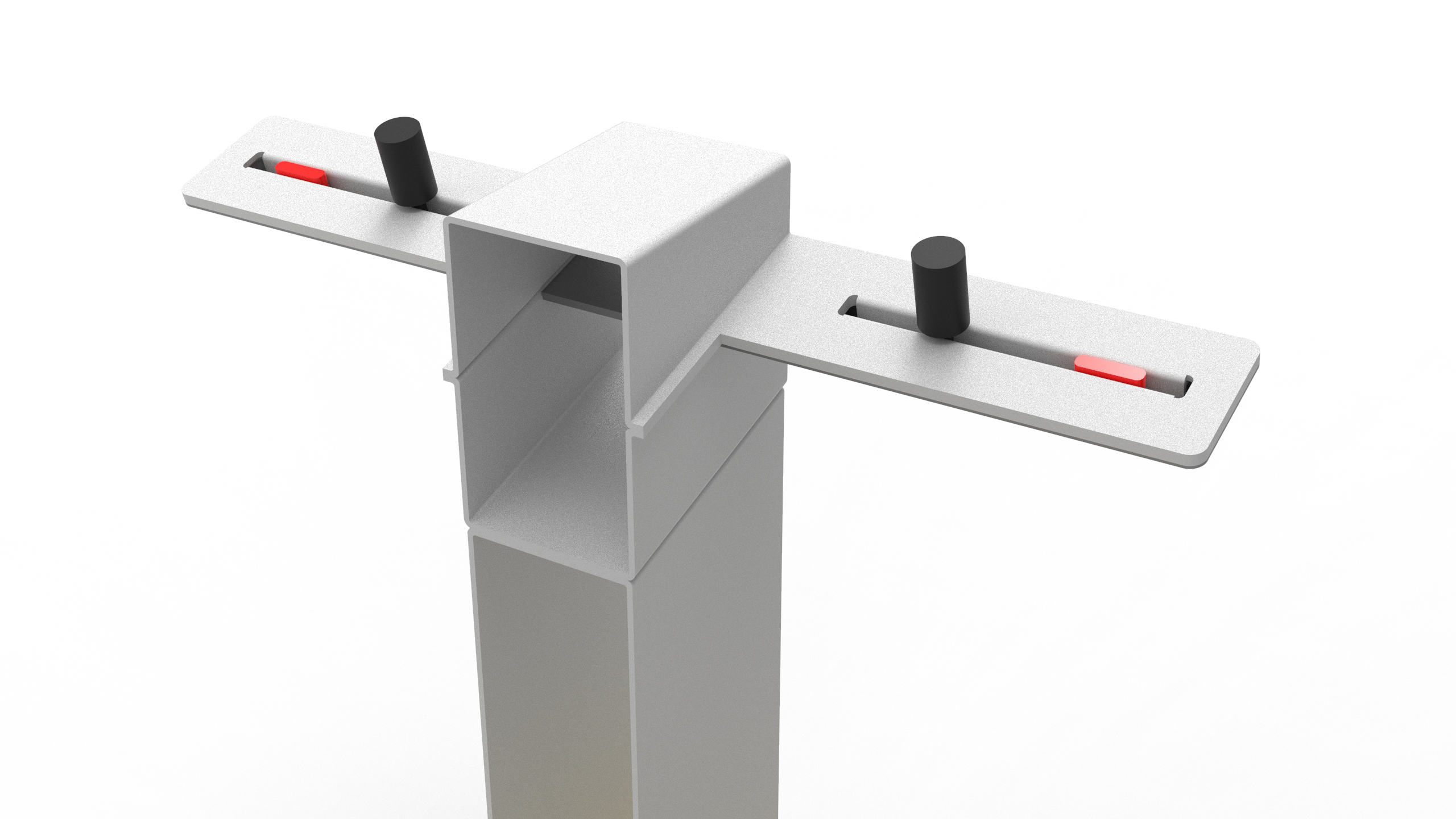
Die Inspiration für unser Steuersystem kam primär von einem Fahrradlenker. Um die Beschleunigung zu integrieren, nahmen wir uns ein Beispiel an einem Bahnradfahrer. Da es hier um Schnelligkeit geht, ist die Stellung der Arme relativ eng. Das Gegenstück dazu ist ein Downhill Mountain Bike Fahrer, der durch das Abbremsen eine breite Armstellung hat. Unser Lenker verfügt über zwei Griffeinheiten, die in Relation zueinander bewegt werden können. Um zu beschleunigen, werden die Griffe nach innen gezogen. Will der Benutzer abbremsen, zieht er die Griffe nach außen. Wie bei einem herkömmlichen Fahrradlenker muss der Benutzer den Lenker in die gewünschte Richtung schwenken, um zu lenken.
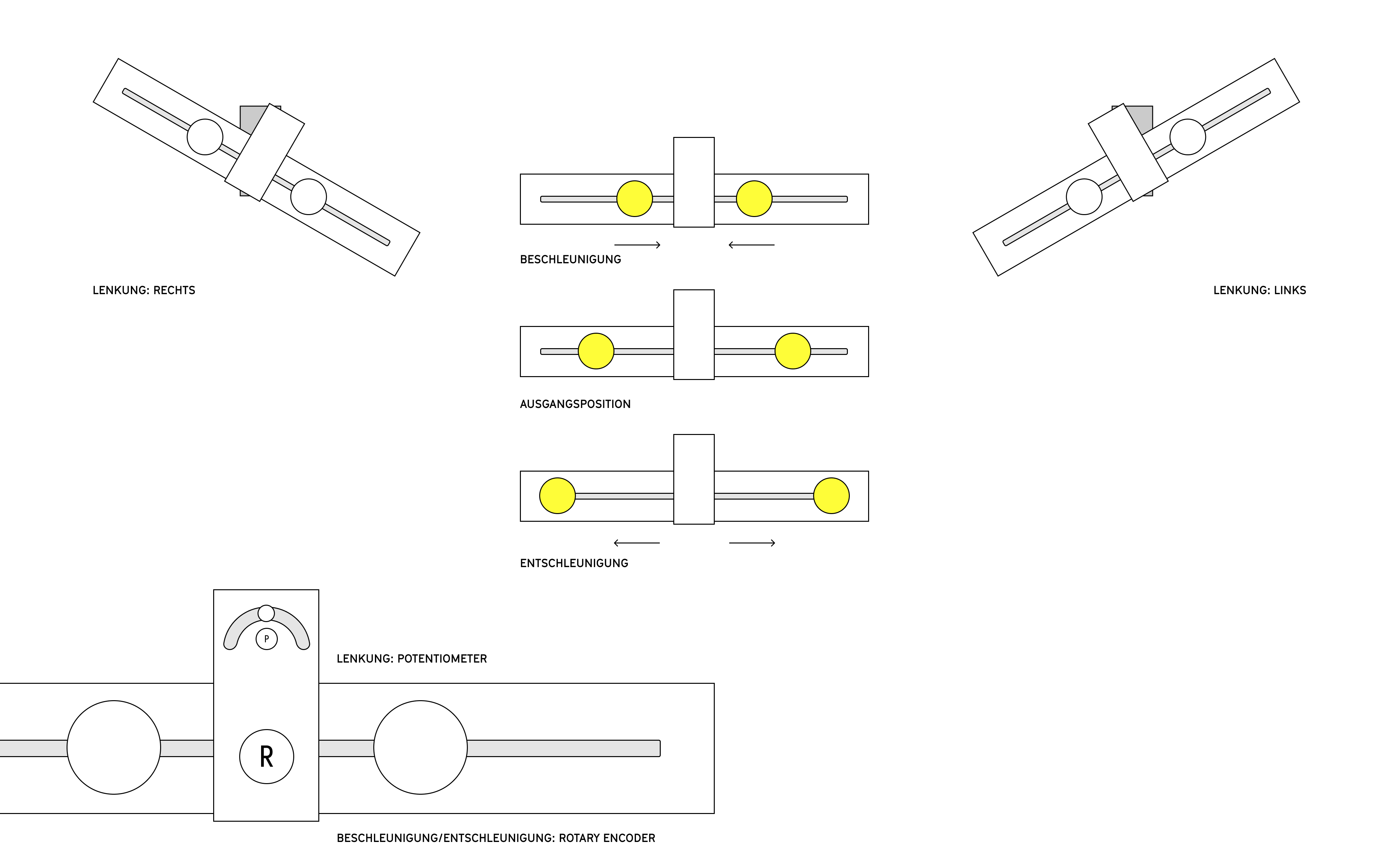
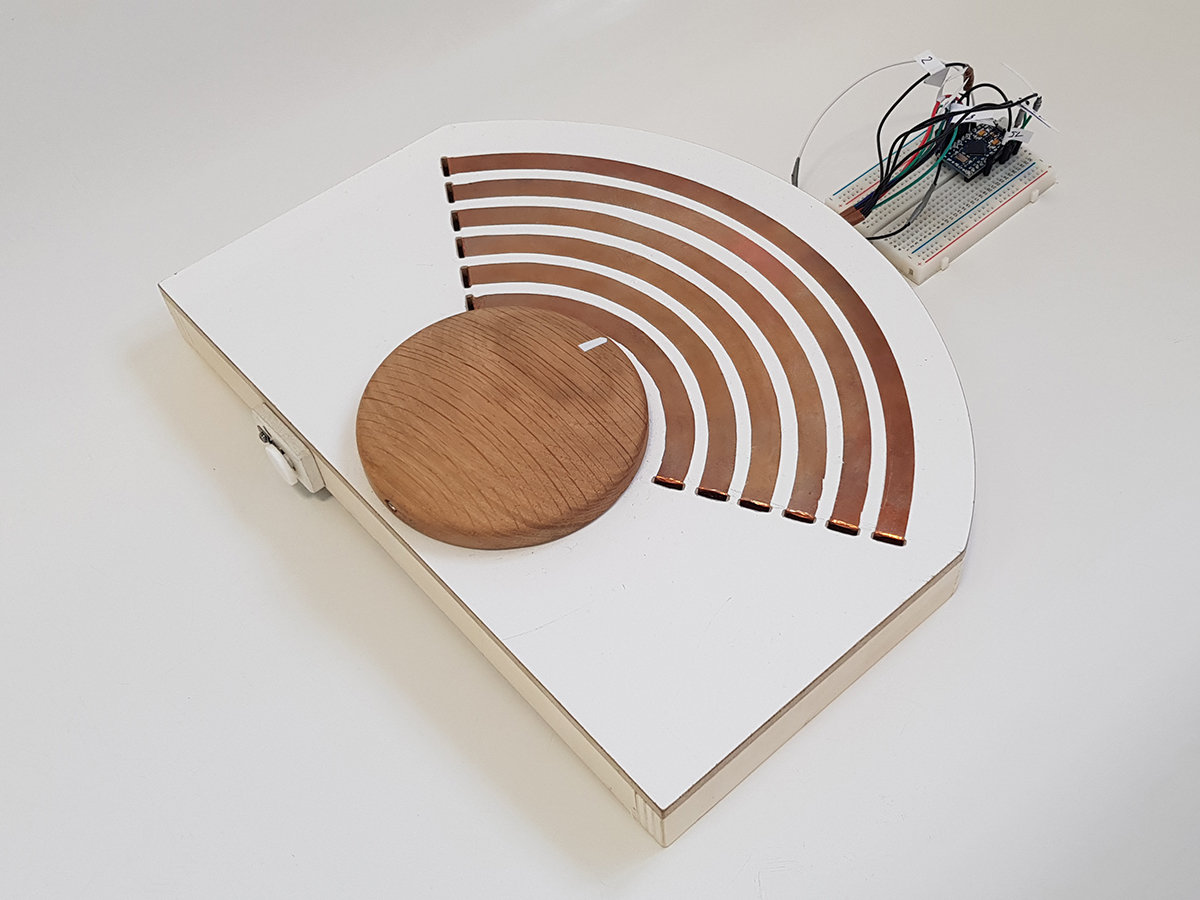
Die benötigten Arduino-Bauteile für unser Funktionsmodell sind ein Rotary Encoder, der für die Beschleunigung zuständig ist und ein Potentiometer, welches die Lenkbewegung für den Code übersetzt. Diese beiden Teile wurden an ein Breadboard angeschlossen und mithilfe von 3D-Druckteilen auf einer robusten Basis befestigt.
↓ Ein Video zum Prozess gibt’s hier. ↓
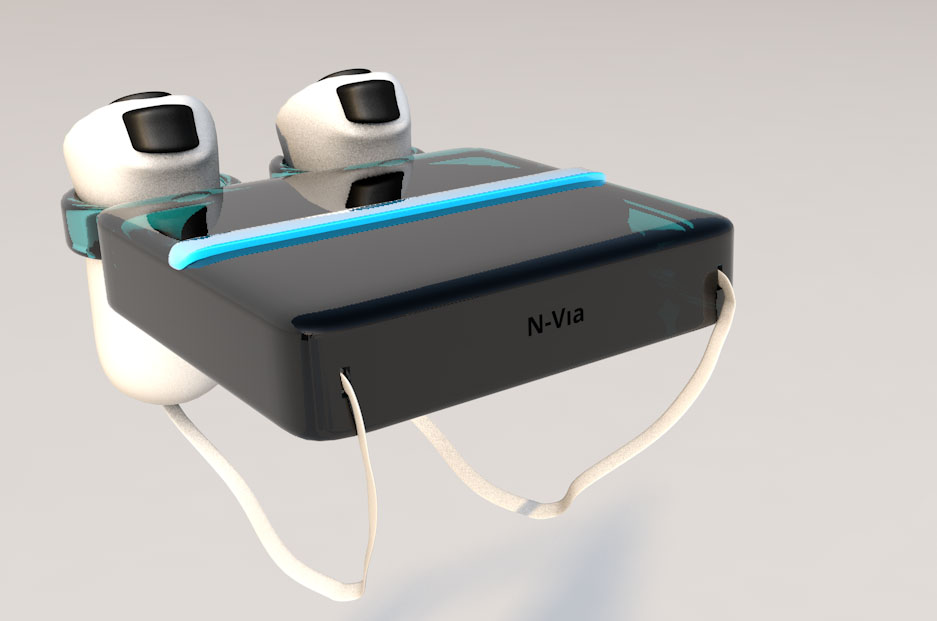
Das Designmodell zum Konzept besteht aus gebogenen Blech, welches zurückhaltend wirkt, aber durch kleine Details trotzdem zu einem Blickfang wird. Es vermittelt Leichtigkeit und überzeugt mit minimalen Farbakzenten. Im Vergleich zum Funktionsmodell steht die Mechanik hier im Hintergrund.
Ina Kaller, André Hieber, Thanh Nguyen, Ina Kaller, Thanh Nguyen, Andre Hieber
BetreuungProf. Michael Schuster, Prof. Carmen Hartmann-Menzel
Tags