Interface Design 1
BrickBoss

Im Fach ‚Interface Design 1‘ wurde ein Roboter bereitgestellt, mit dem es möglich war, das
Geschicklichkeitsspiel ‚Jenga‘ zu spielen.

In einem zweier Team war es unsere Aufgabe, einen Controller zu entwickeln, mit dem der Roboter gesteuert werden kann. Zur Abgabe gehören ein digitales 3D-Modell sowie ein funktionsfähiger Prototyp.
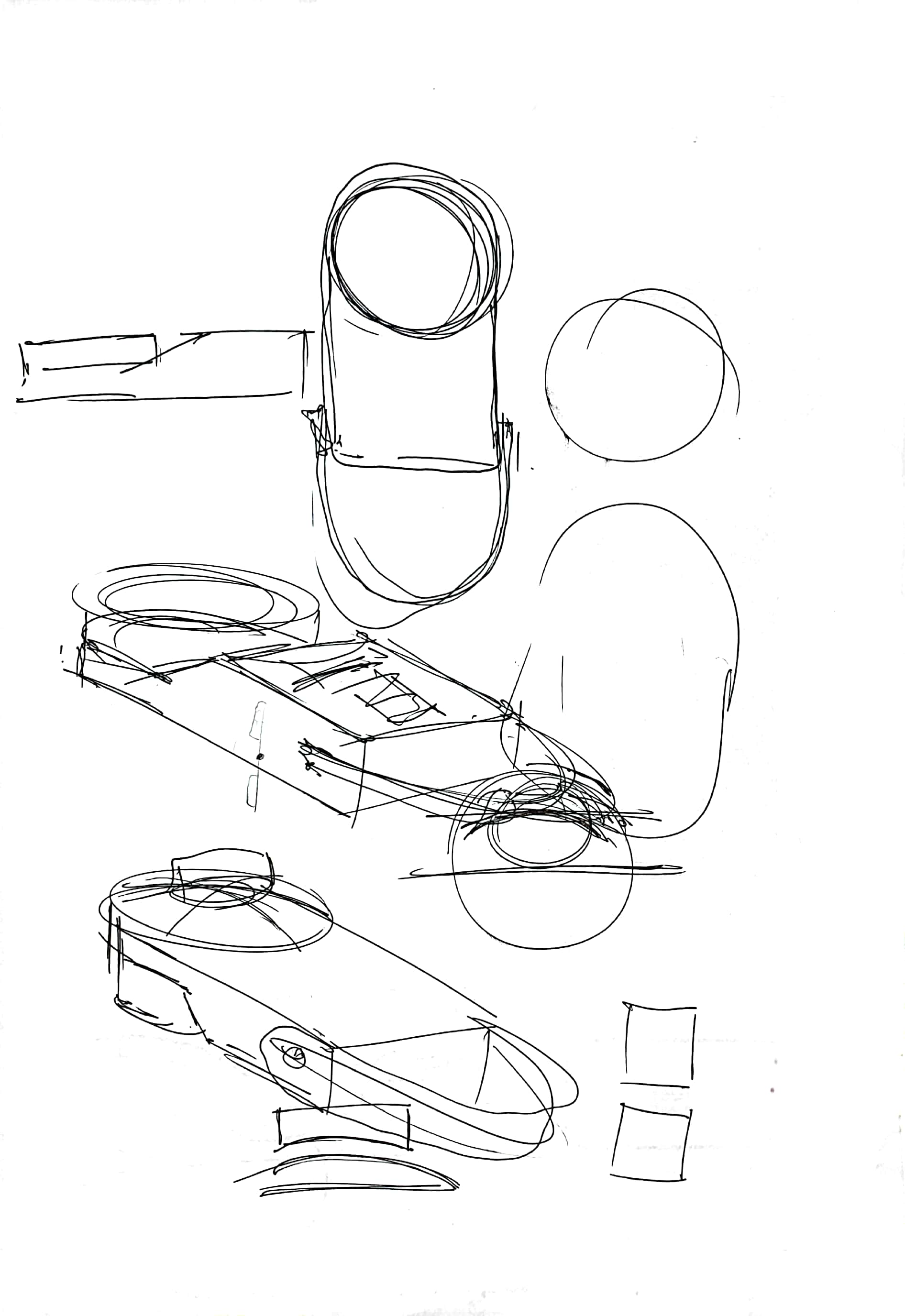
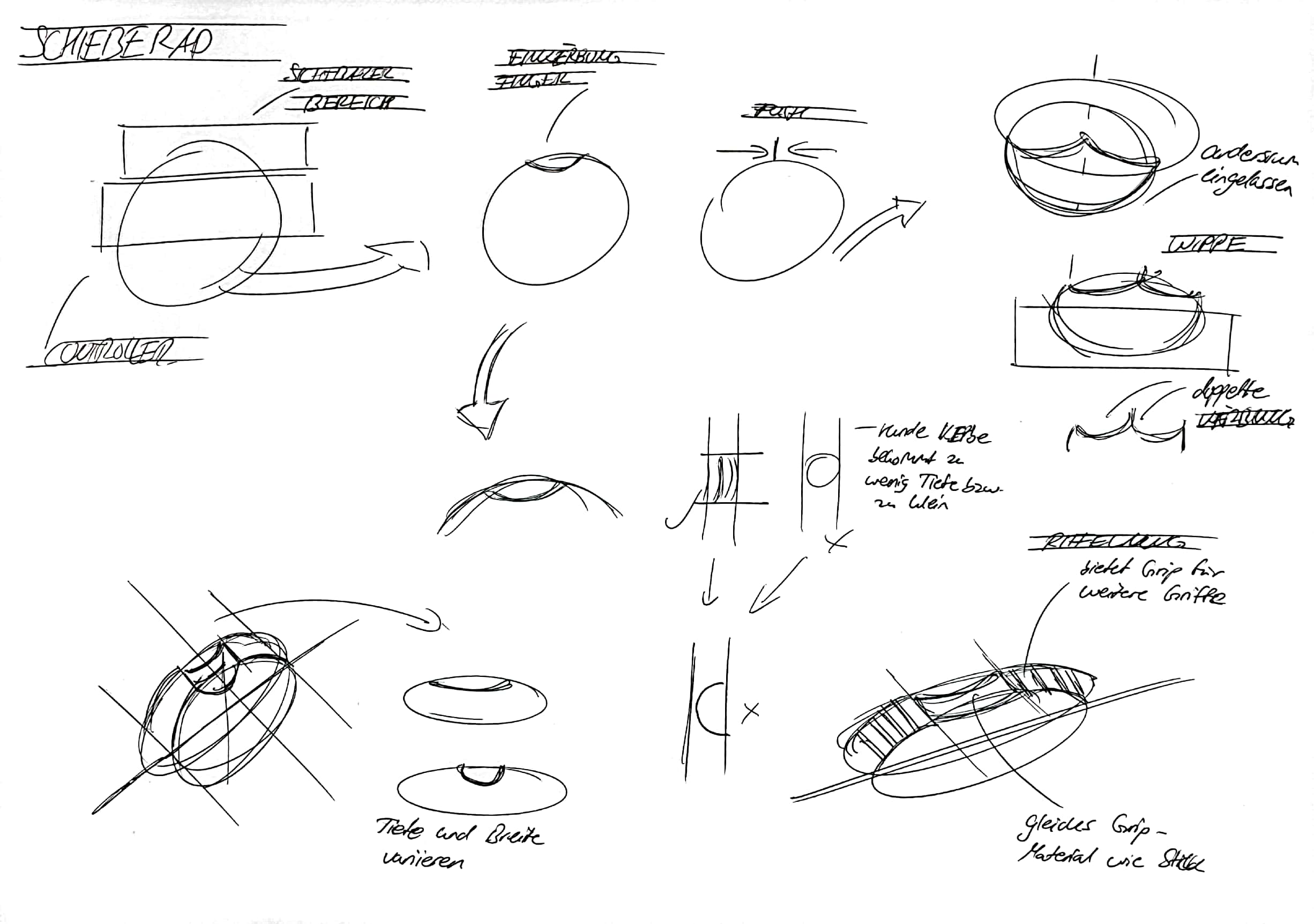
Wir begannen mit der Überlegung, welche Form und welche Bedienelemente für einen Controller mit diesen Anwendungsfall am sinnvollsten wären. Nach Recherchen zu bereits existierenden Steuerungen, beschlossen wir uns an Contollern zu orientieren, die im industriellen Kontext, wie zum Beispiel zum Steuern von Kränen und ähnlichem benutzt werden. Daraus entwickelten sich die beiden folgenden. Die erste der beiden Grundformen wird mit einem Gurt umgehängt und kann so mit beiden Händen gleichzeitig bedient werden. Die zweite wird mit einer Hand gehalten, während mit der anderen Hand gesteuert wird. Wir testeten die Größenverhältnisse und die Bedienbarkeit der Ideen, indem wir sie auf Papier ausdruckten. Wir entschieden uns, mit der zweiten Variante weiterzuarbeiten, da uns die erste Variante zu groß erschien und gerade beim genaueren Betrachten des Turms und des Roboters, um z.B. Abstände besser erkennen zu können, die erste Variante zu oft im Weg war.
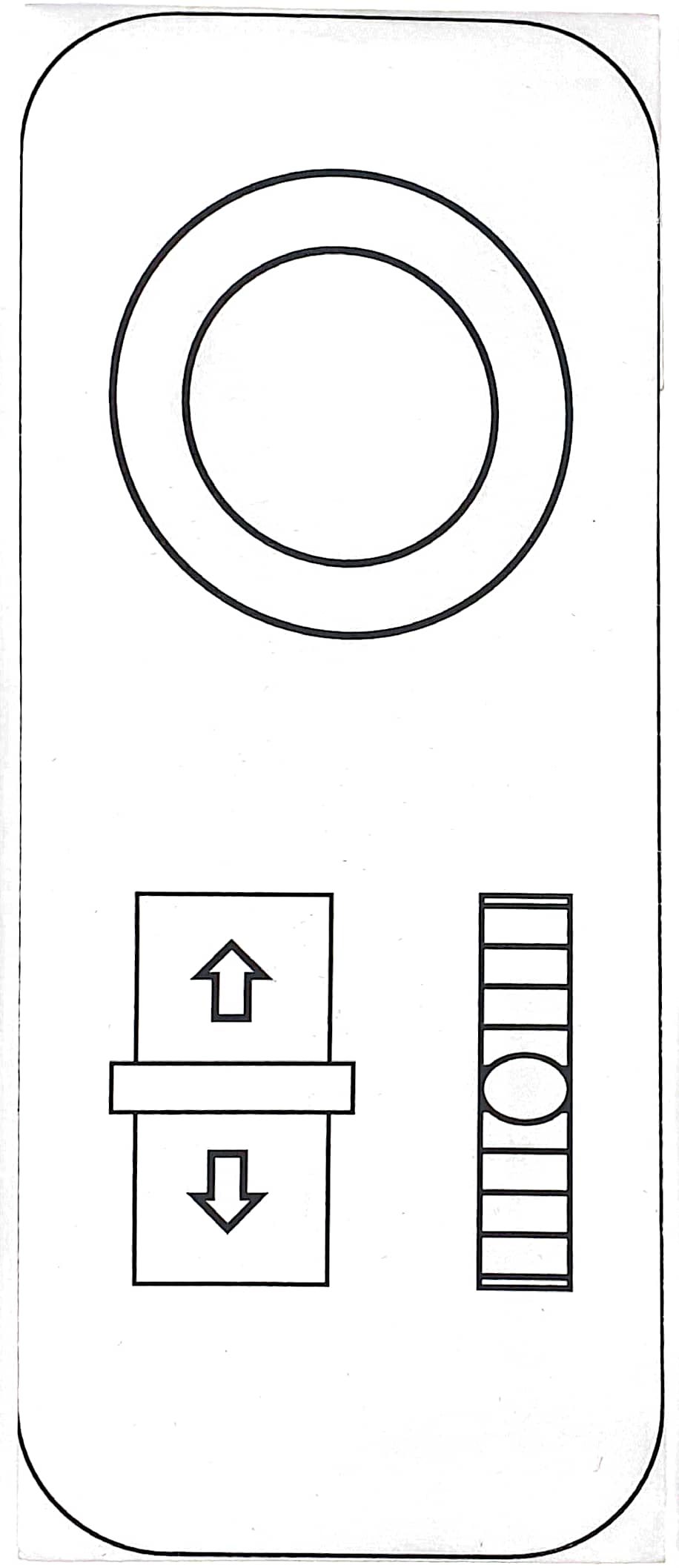
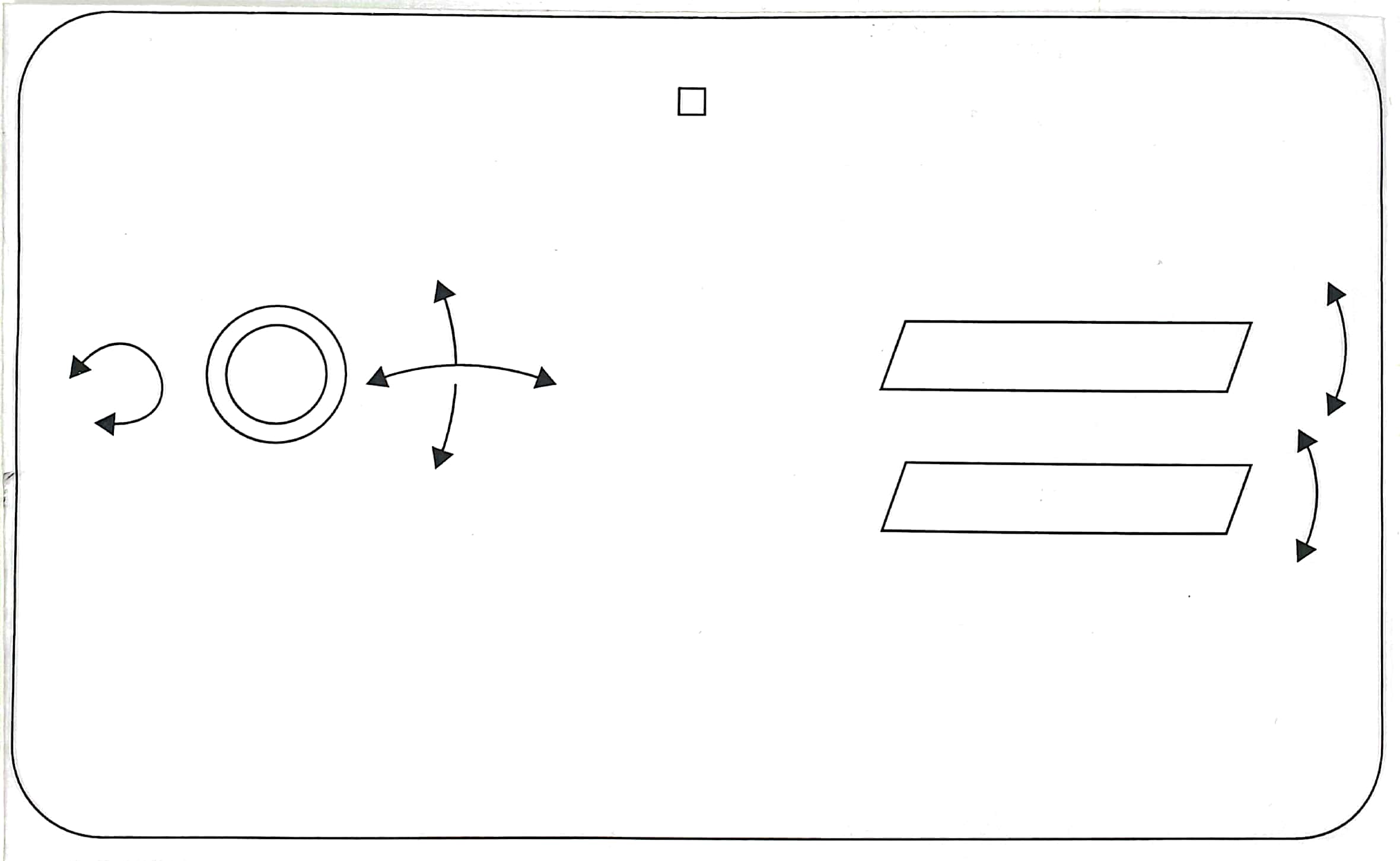
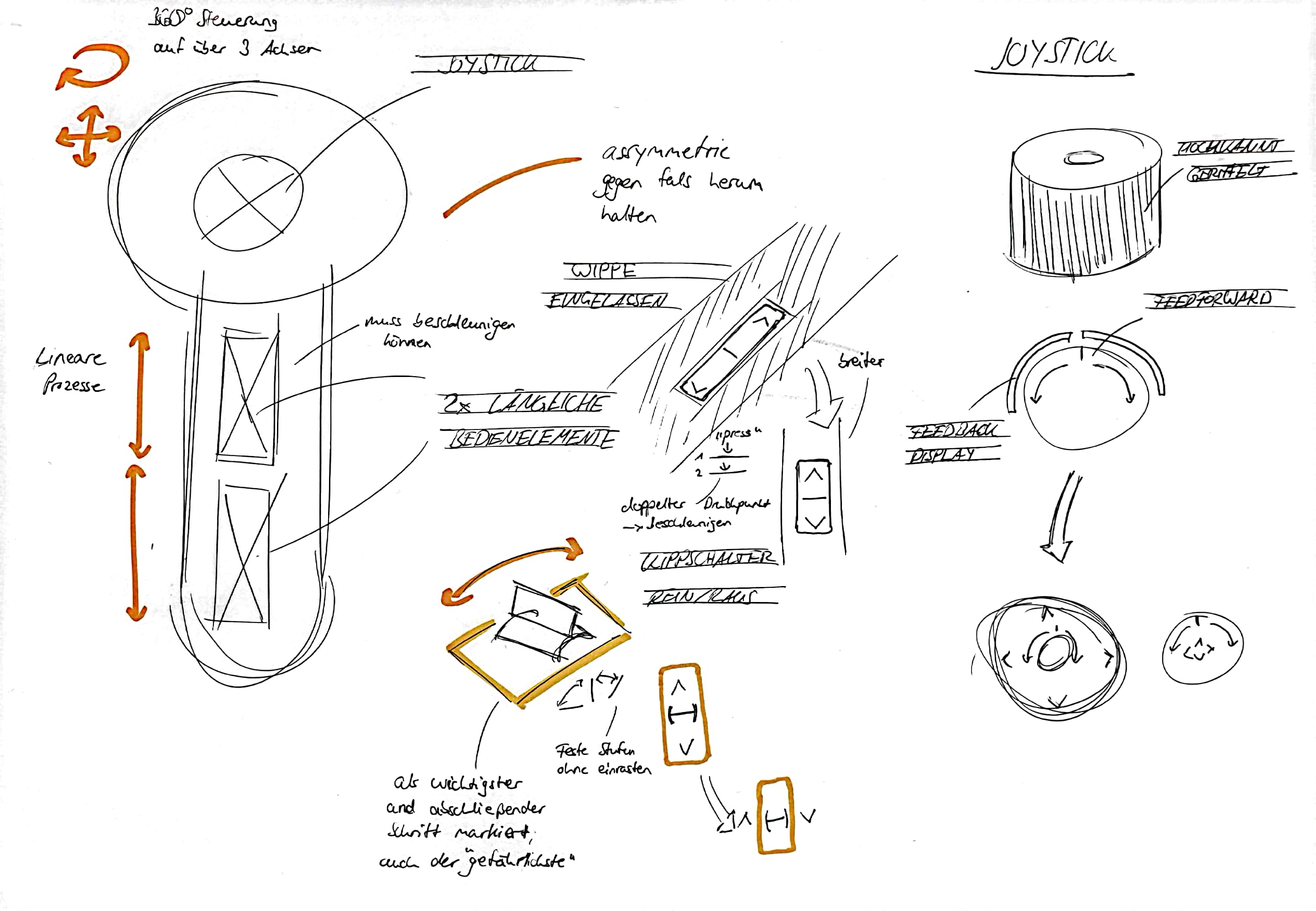
Neben den zwei verschiedenen Formen haben wir auch zwei verschiedene Bedienungsarten getestet. Bei einer der beiden wird ein dreiachsiger Joystick zum steuern des Roboters im Raum verwendet. Mit diesem kann man den Roboter nach vorne oder hinten sowie nach links oder rechts bewegen. Durch ein Drehen des Joysticks um 90 Grad dreht sich auch der Roboter. Zum Steuern des Armes werden zwei Wipp- oder Kippschalter zum hoch oder runter und zum rein oder raus fahren verwendet.
Die zweite Idee basiert auf zwei Joysticks. Mit dem einem lässt sich der Roboter nach vorwärts und rückwärts bewegt, der andere wird verwendet um den Arm hoch oder runter zu fahren und den Roboter nach links oder rechts zu bewegen. Der Gedanke bei dieser Bedienung war den Roboter erst einmal grob mit dem ersten Joystick auszurichten um dann nur noch den Arm mit dem zweiten Joystick genau zu positionieren.
Nach testen der beiden Varianten beschlossen wir die erste Bedienungsarten weiter zu verfolgen, da die zweite Variante länger zum ausrichten brauchte und
die Anordnung komplizierter zu
verstehen war.
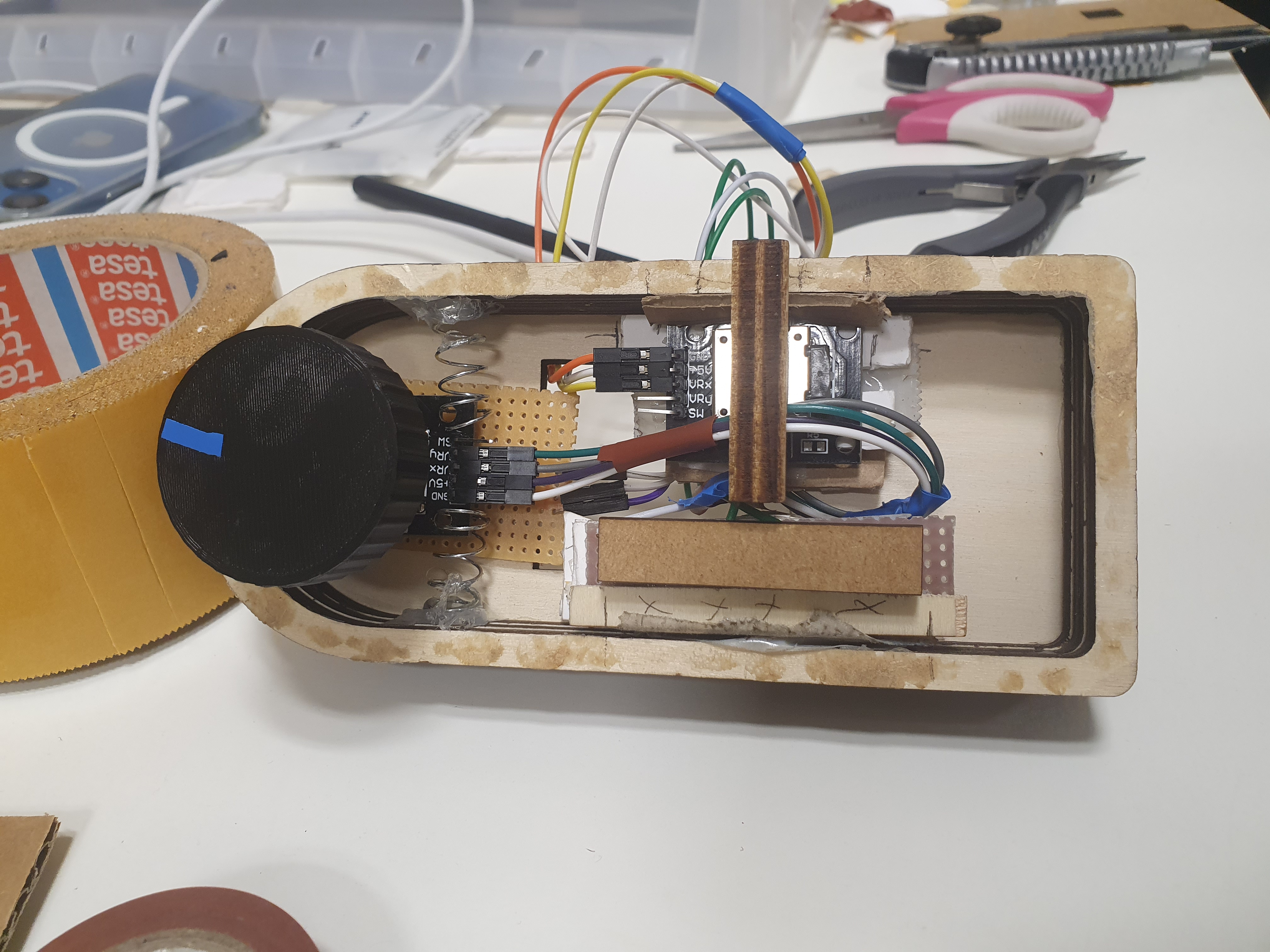
Mit der Form und den Bedienelementen begannen wir mit Hilfe eines Arduinos einen Prototyp zu bauen. Die Grundform besteht aus mehreren Schichten Kappa, die mit einem Lasercutter zugeschnitten wurden. Der Joystick wurde uns bereitgestellt. Der Schieberegler zum hoch und runter fahren des Arms ist ein Joystick von dem nur eine Achse verwendet wird. Dafür haben wir ein lasergecuttetes Holzstück auf dem Joystick befestigt. Die Wippe zum ein- und ausfahren des Arms sind zwei Buttons die unter einem Stück Kappe
liegen. Die Bedienelemente wurden an einen Arduino angeschlossen und konnten mit einer bereitgestellten Library funktionsfähig gemacht werden.
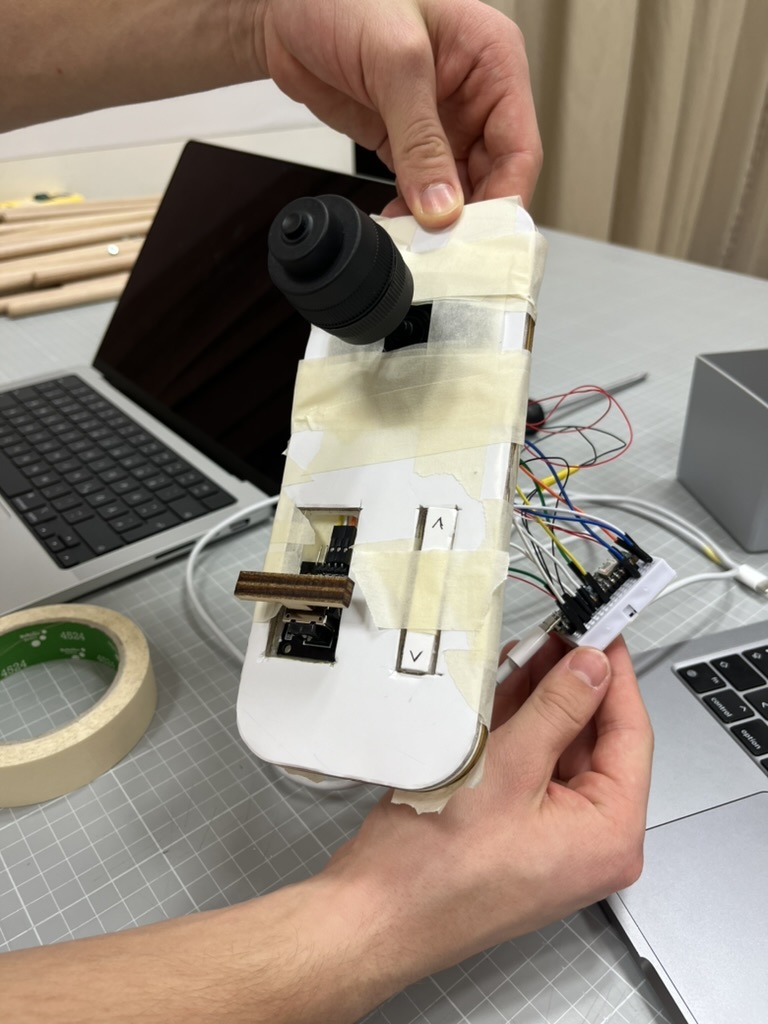
Mit dem Prototyp haben wir das erste Usability Testing gestartet. Dafür luden wir 4 Tester ein, mit denen wir durch Aufgaben und Fragestellungen besser heraus finden konnten, wo noch Problem in unserem aktuellen Prototyp liegen.
Dabei wurde unteranderem deutlich, dass der Controller nicht immer in der richtigen Postion in die Hand genommen wird, sondern oft schräg gehalten wird. Unser Form und die Aufteilung der Bedienelemente hingegen funktionierte wie erhofft gut.
Nach dem User Testing begannen wir den Controller in digital nachzubauen und damit das Endprodukt zu entwickeln.
Wir suchten erneut Inspirationen und verschiedene Ansätze für Materialien und Detailausführungen. Dabei entstanden mehrere Varianten.
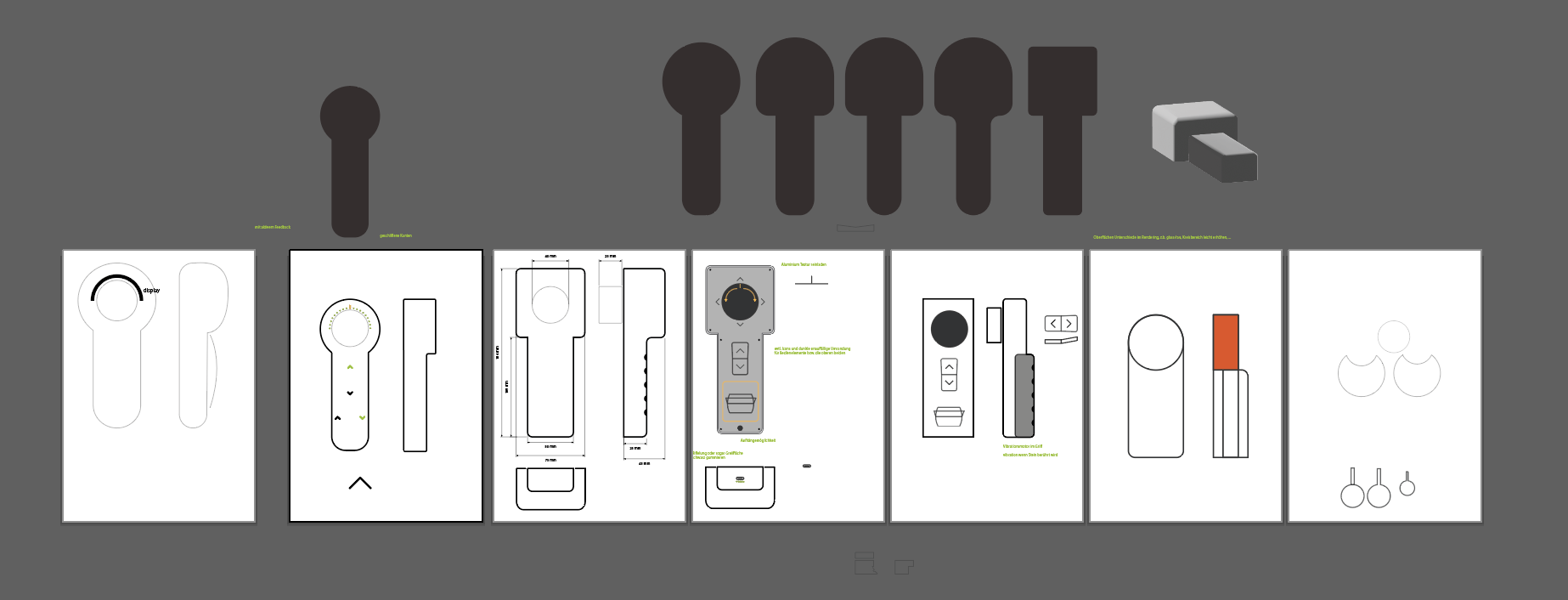
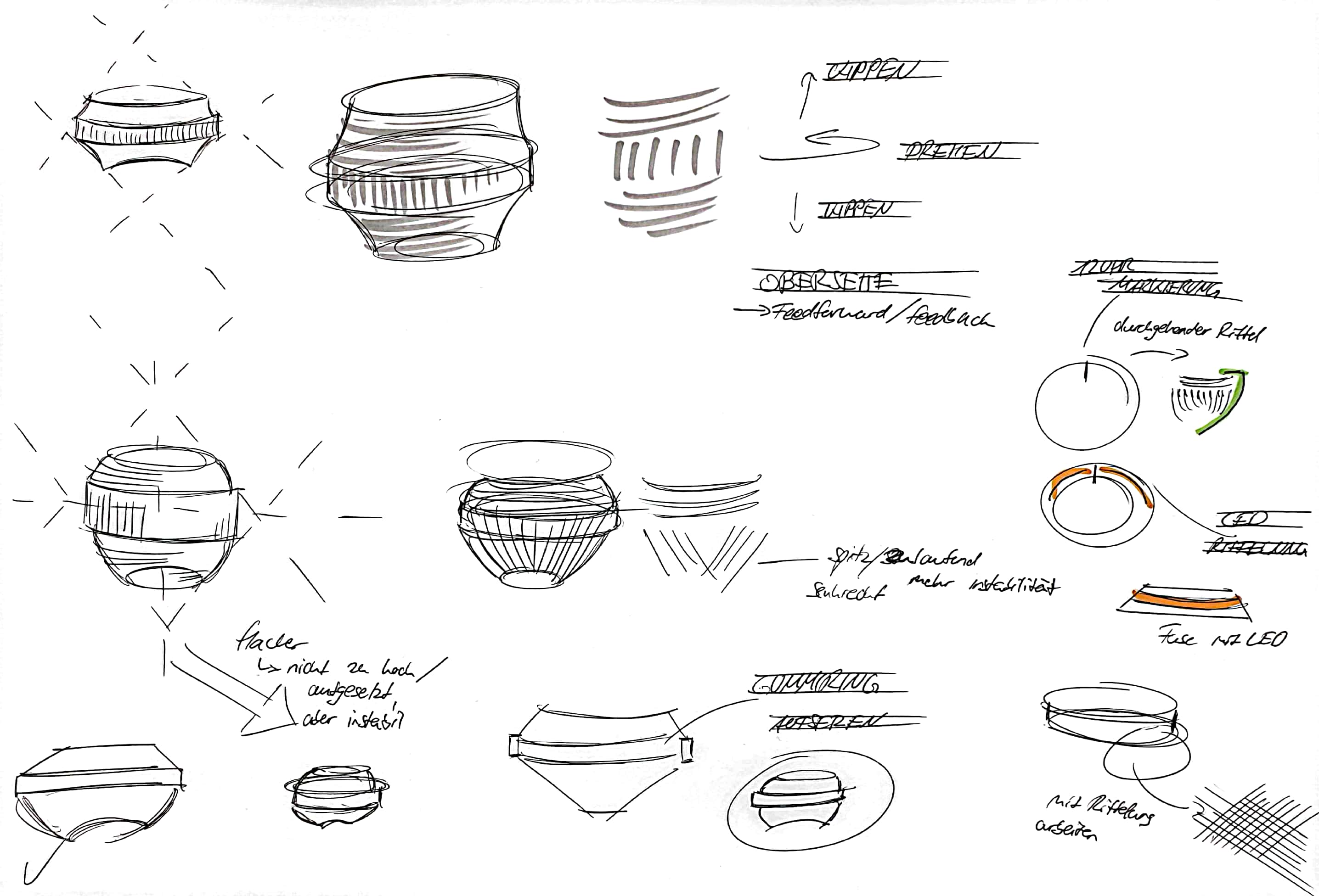
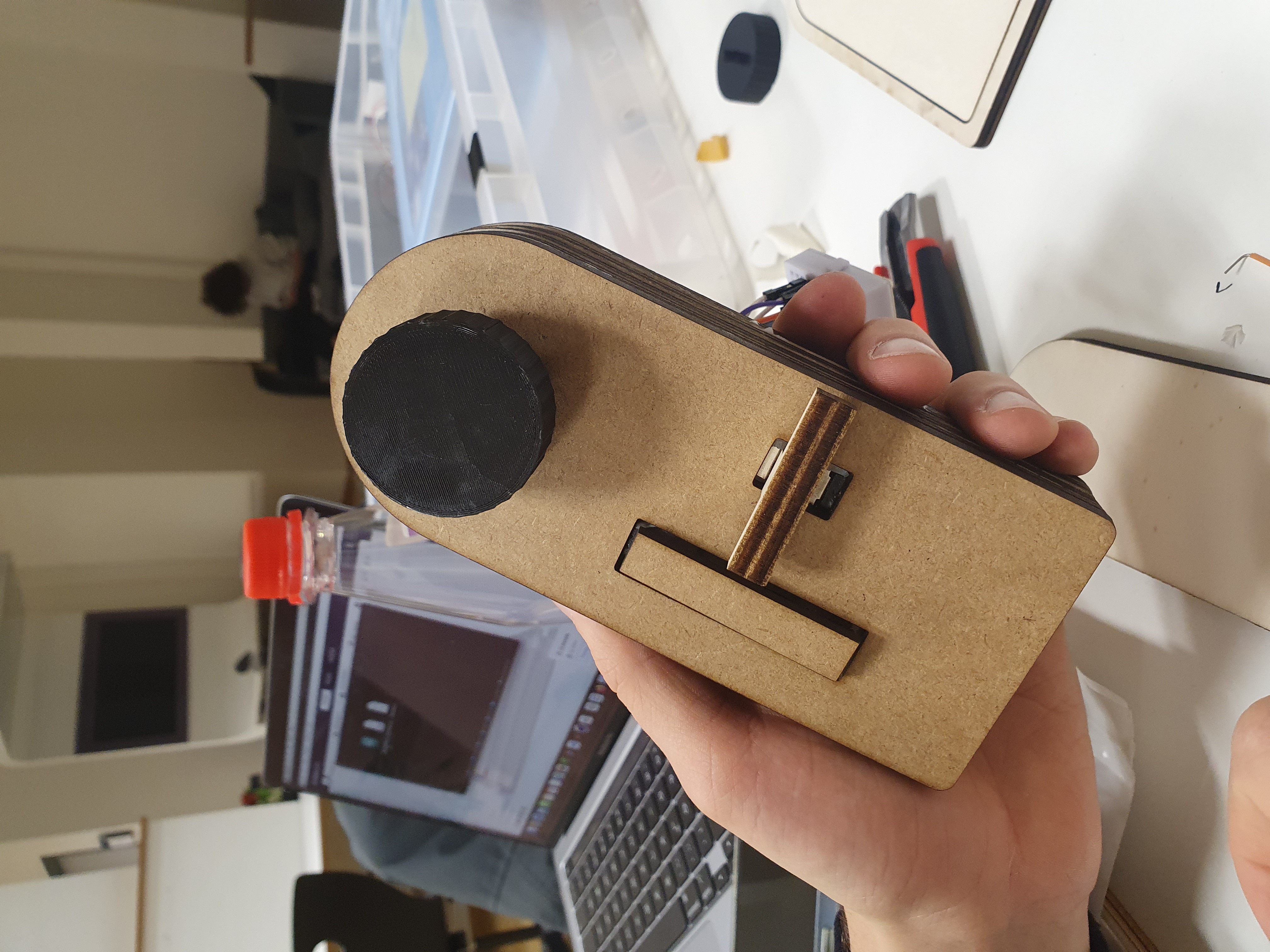
Parallel gestalteten wie auch unseren Prototyp neu. Statt Karton benutzten wie Holz und die Form wurde etwas schmaler und kürzer gemacht mit einer Abrundung vorne. Der 3-achsige Joystick wurde ebenfalls neu gedacht, da uns das zur Verfügung gestellte Model zu groß war. Stattdessen klebten wie ein 2-achsigen Joystick auf einen Schlagbrett Potentiometer und befestigten diesen mit Feder an der Wand des Gehäuses um trotzdem ein Zurückspringen auf die Mitte zu gewähren. Die Wippe und den Kippschalter bauten wir ebenfalls in das neue Gehäuse ein. Im Vergleich zum ersten Prototyp tauschten wir aber die beiden Elemente, sodass die Wippe zum hoch und runter fahren funktionierte und der Wippschalter zum rein und raus fahren des Arms. Außerdem gestalteten wir einen Aufsatz für den Joystick, der 3D gedruckt wurde.
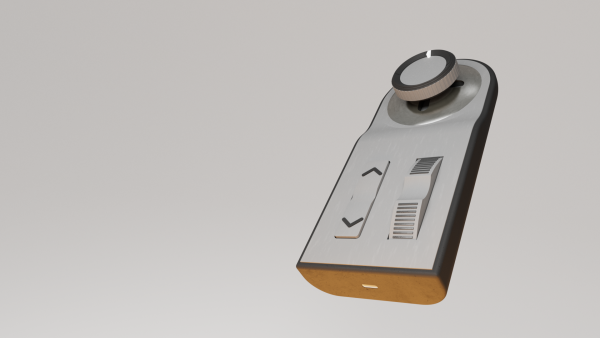
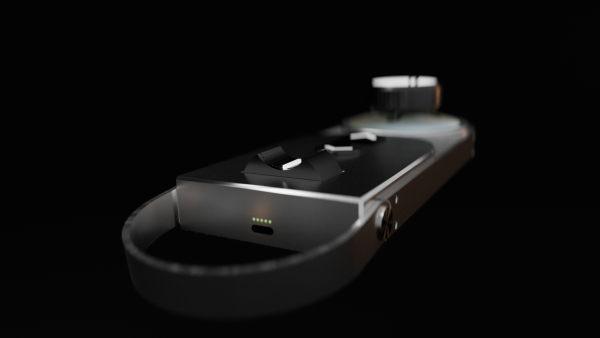
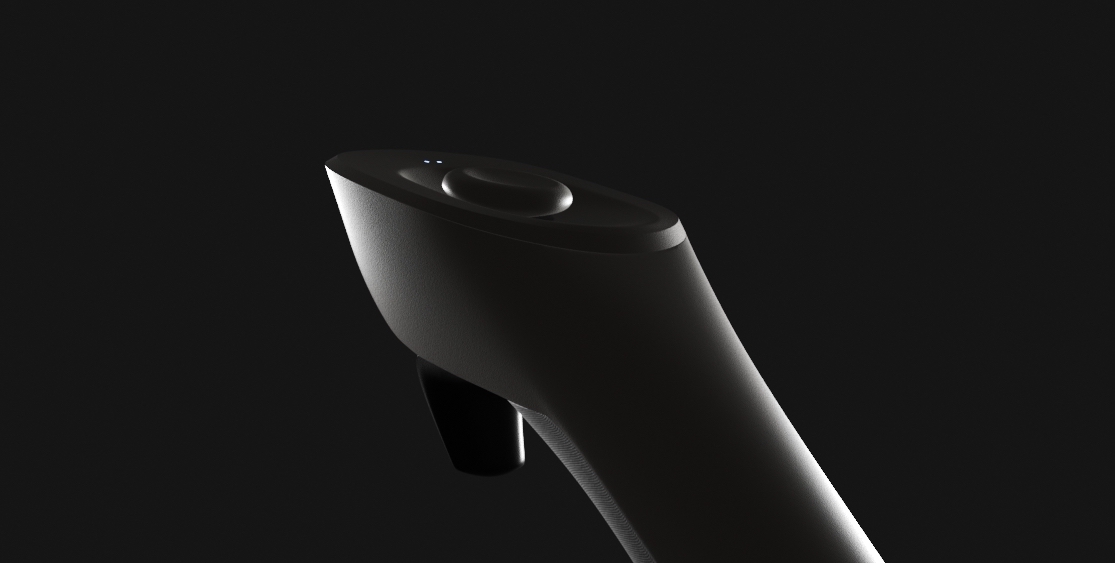
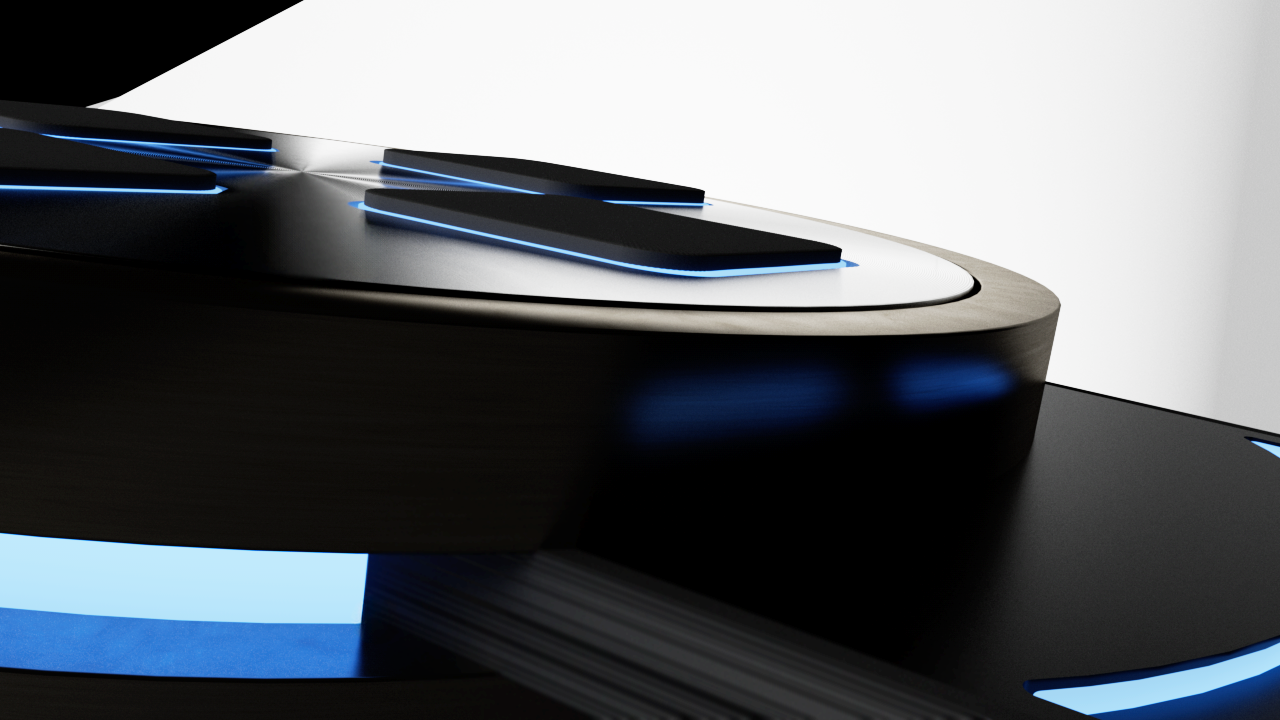
Zum Ende entstanden in Cinema 4D zwei Varianten, die wir mit Bedienelemente und Materialien fertig ausgearbeitet haben. Die Dark Version besteht aus einem Block Metall, der nach vorne etwas dünner wird und von unten mit einer Gummischicht überzogen ist. Die Bedienelemente sind wie beim zweiten Prototyp angeordnet.
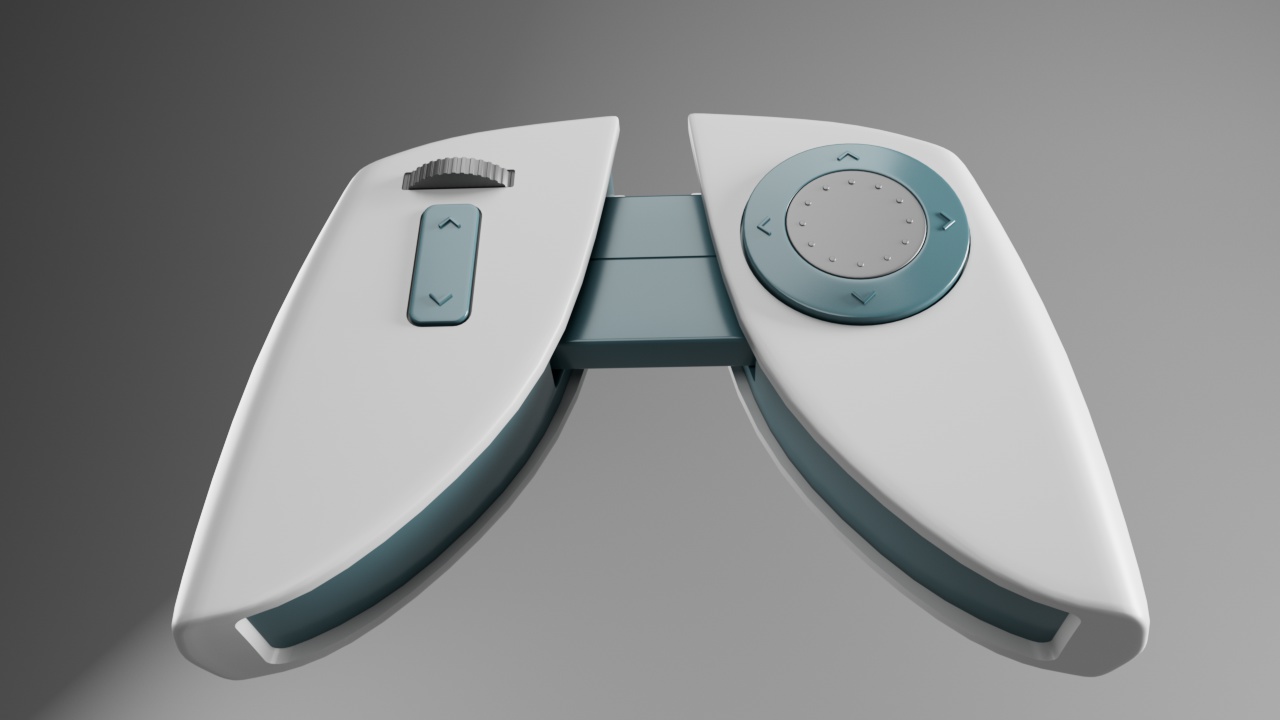
Die Light Version besteht aus zwei getrennten Teilen, die durch einen Metallrahmen um das Gehäuse zusammengehalten werden. Der Joystick ist identisch mit der Dark Version, die anderen Bedienelemente sind untereinander angeordnet. Außerdem ist das Rad um 90 Grad gedreht, so dass es nach links und rechts gedreht werden kann.
Moritz Schneidawind, Moritz Nussbaumer
BetreuungProf. Michael Schuster, Prof. Carmen Hartmann-Menzel
Tags