Interface Design 1
fortuneC01
Aufgabe
Im Rahmen des Kurses “Interface 1” waren wir damit beauftragt, einen Controller zu entwickeln, der zur Steuerung eines Roboters verwendet werden sollte. Der entwickelte Controller sollte somit sämtliche Funktionen umfassen, die der Roboter für das Spiel Jenga benötigt.
Idee
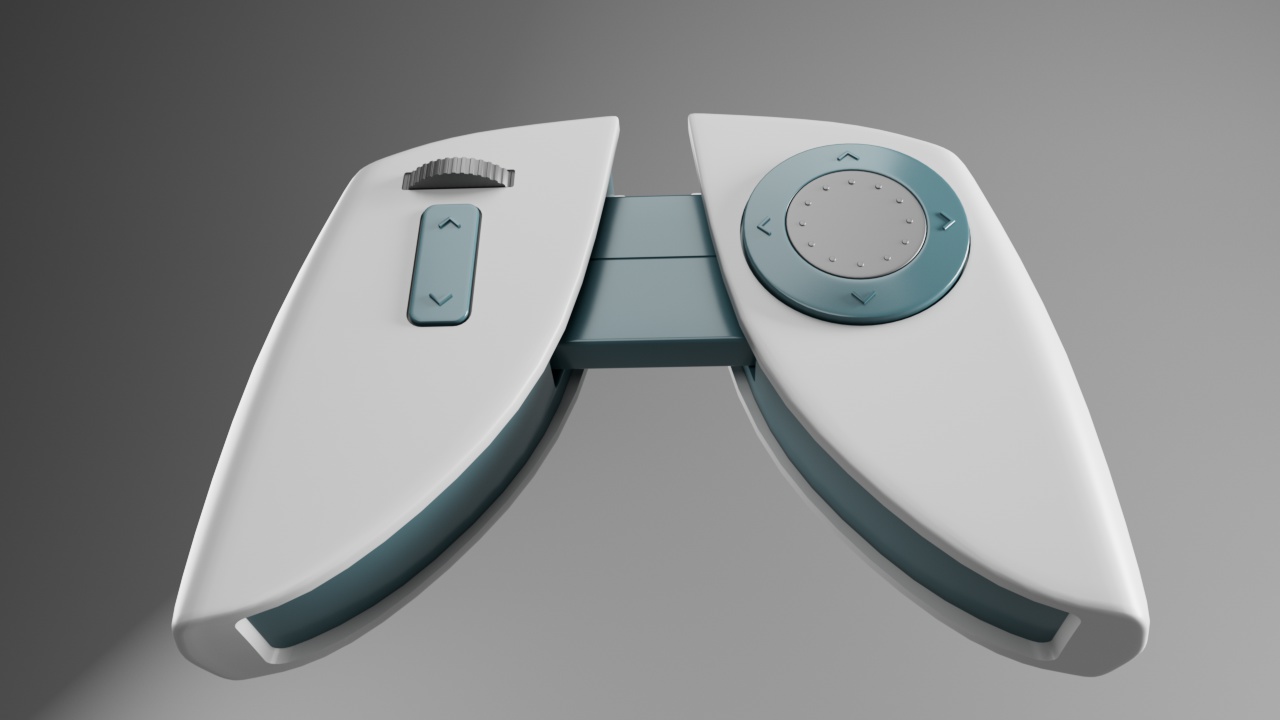
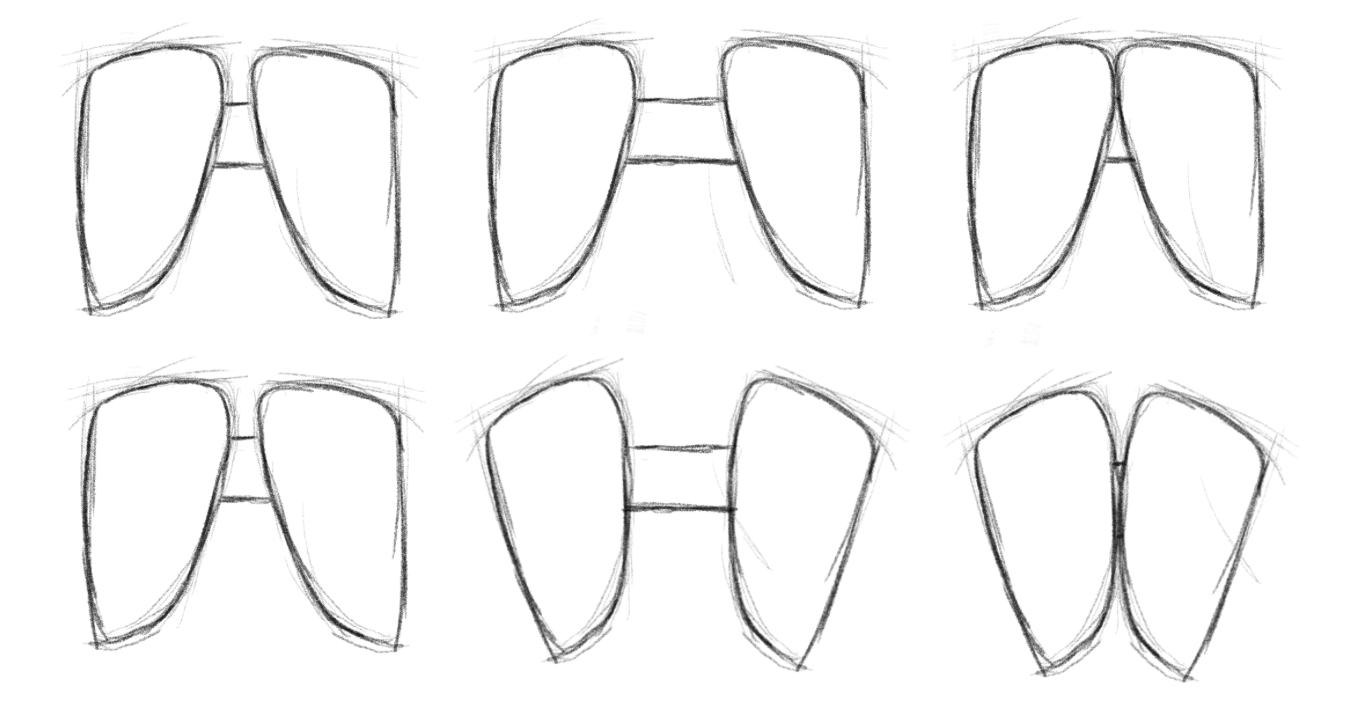
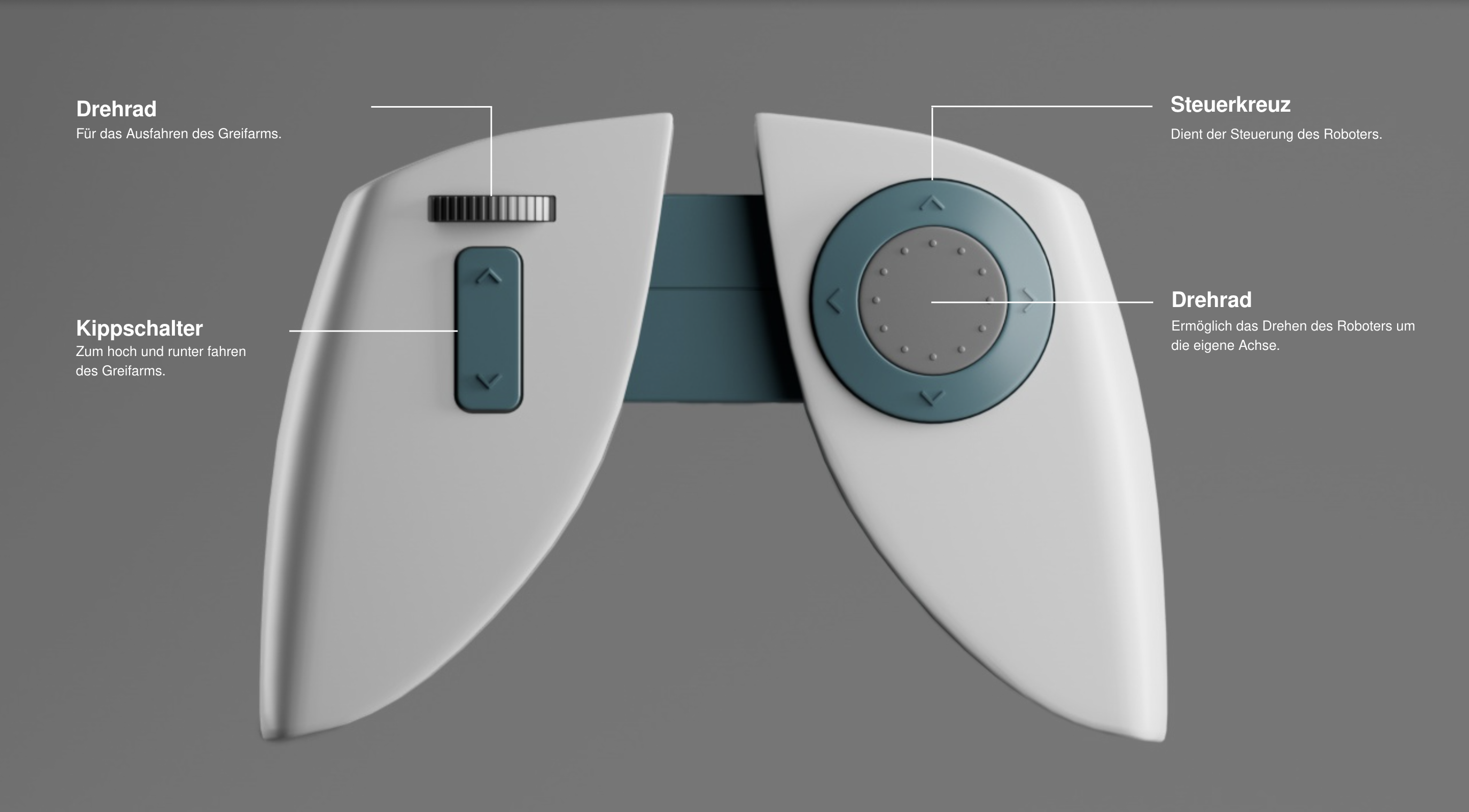
In der Entwicklung unseres Controllers stand die klare und einfache Bedienung im Fokus, verbunden mit einem schlichten Design. Die zweihändige Nutzung gewährleistet einen sicheren Halt. Ein weiteres Anliegen war es feine und grobe Bewegungen zu trennen, um so ein präzises Spiel ermöglichen zu können. Zudem wollten wir ein ansprechendes Drehrad gestalten, welches das Ausfahren des Maßbandes ermöglicht und eine metaphorische Verbindung zur Windung des Maßbandes herstellt.
Praktische ergonomische Ergänzung
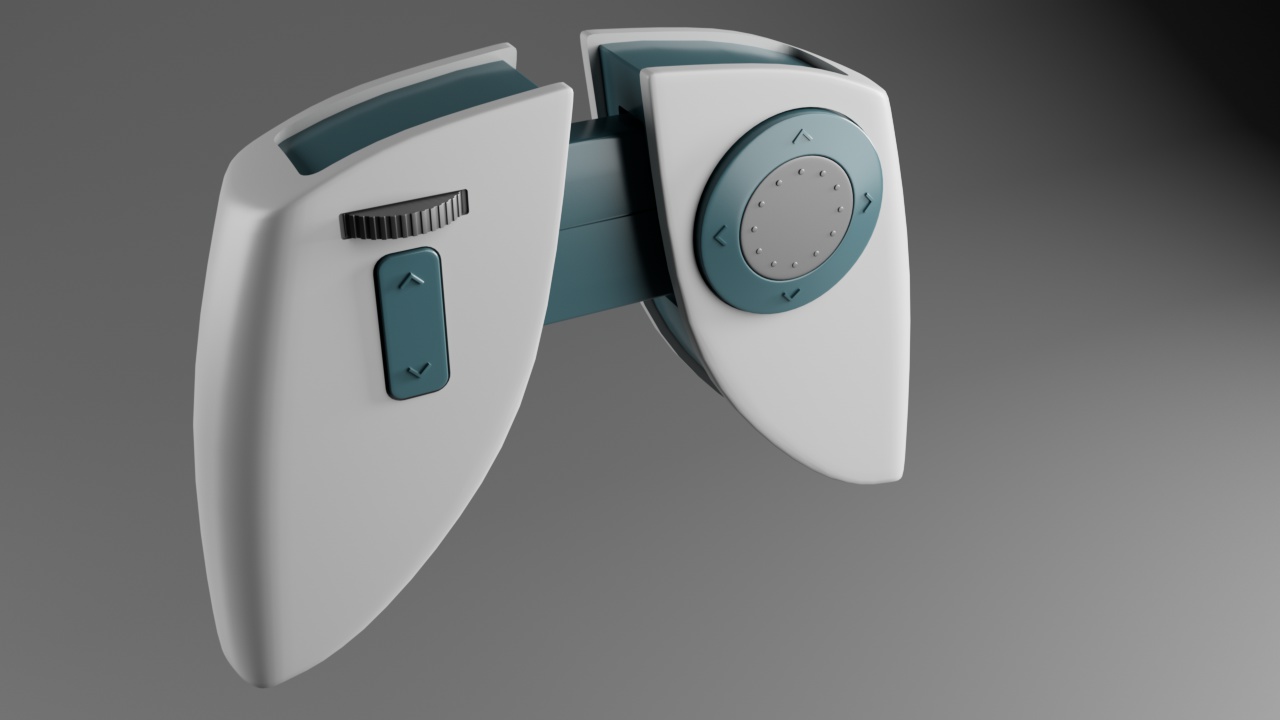
Gegen Ende des Prozesses kamen wir auf die Idee zwei neue Mechanismen einzubauen. Durch die ergonomische Anpassung wird es dem Benutzer ermöglicht, den Controller individuell anzupassen. Er kann ihn ausziehen oder zusammenschieben, um den Abstand an die eigene Hand anzupassen, je nachdem, wie nah man die Hände aneinander positionieren möchte.
Zusätzlich lässt sich der Controller von beiden Seiten durch einen Mechanismus nach innen klappen, was eine Anpassung an den gewünschten Winkel des Handgelenks ermöglicht. Darüber hinaus ermöglichen beide Mechanismen, den Controller vollständig zusammenzuschieben und einzuklappen. Auf diese Weise nimmt der Controller wenig Platz ein und kann mühelos überall verstaut und mitgenommen werden.
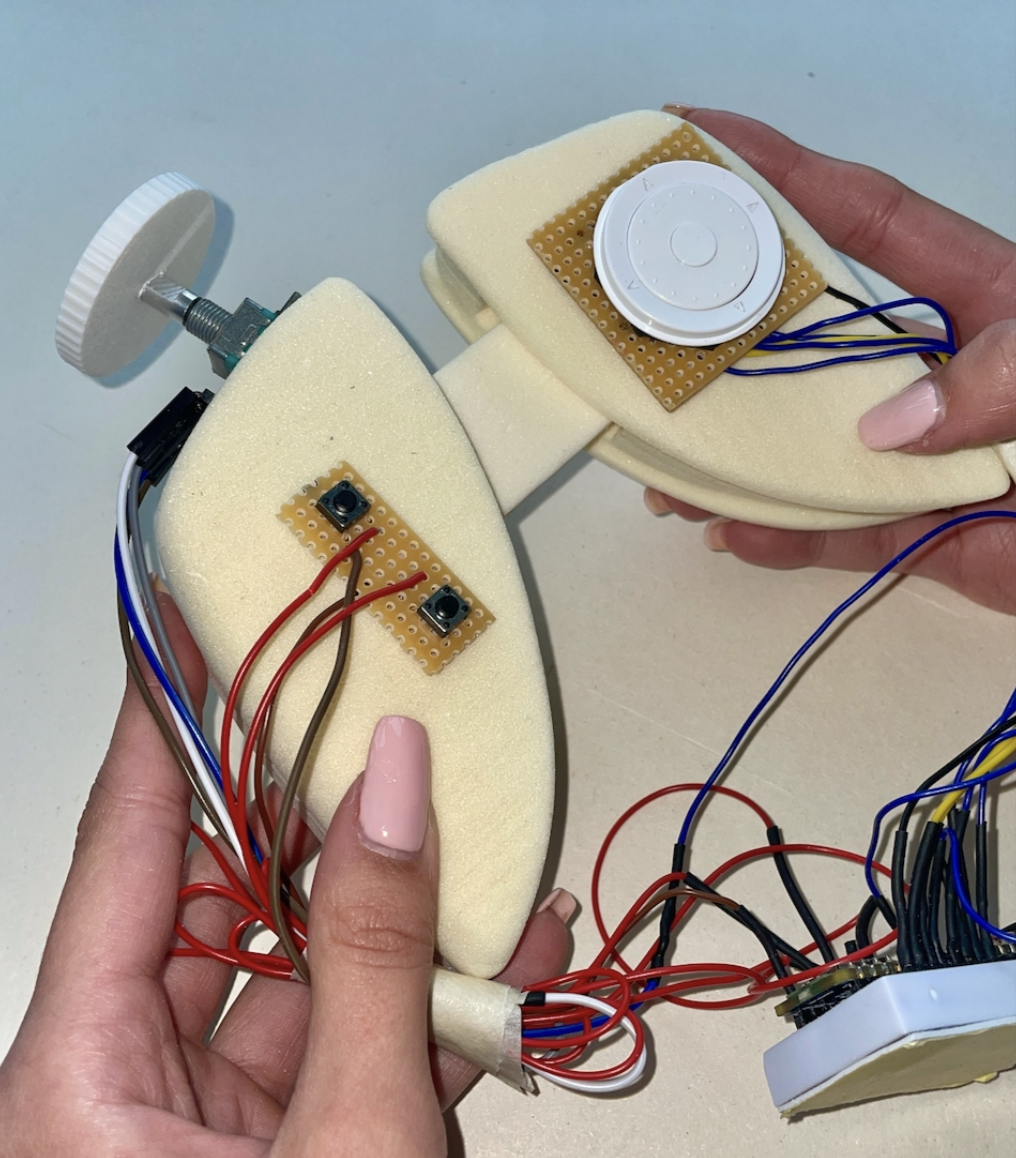
Funktionsprototyp
Wir bauten unseren Funktionsprototyp und befestigten die zuvor gelöteten Platinen oberhalb. Die Größe des Controllers und die Positionierung der Buttons sind nun finalisiert worden. Aus Platzgründen musste lediglich das Rad oberhalb der linken Hälfte positioniert werden.
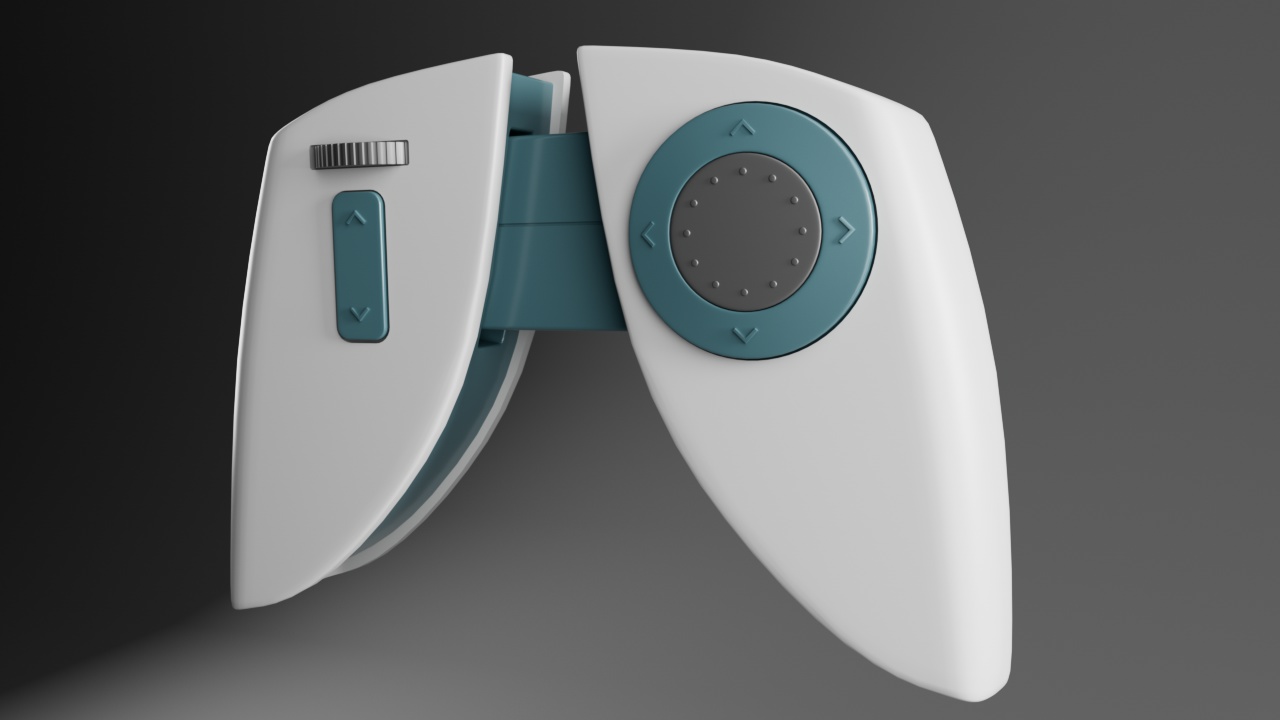
Final Product
Hannah Moser, Lea Dannenhauer, Dimitri Wagner
BetreuungProf. Michael Schuster, Prof. Carmen Hartmann-Menzel
Tags