Interface Design 1
EQ Nexus

Erste Schritte
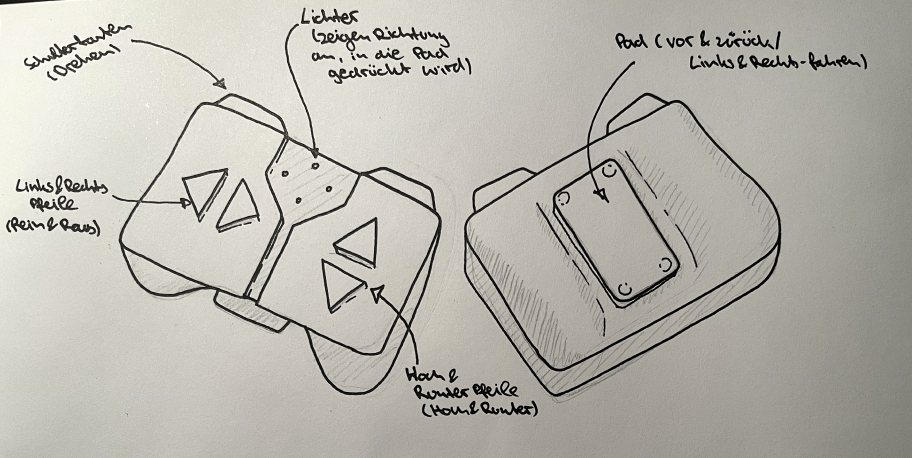
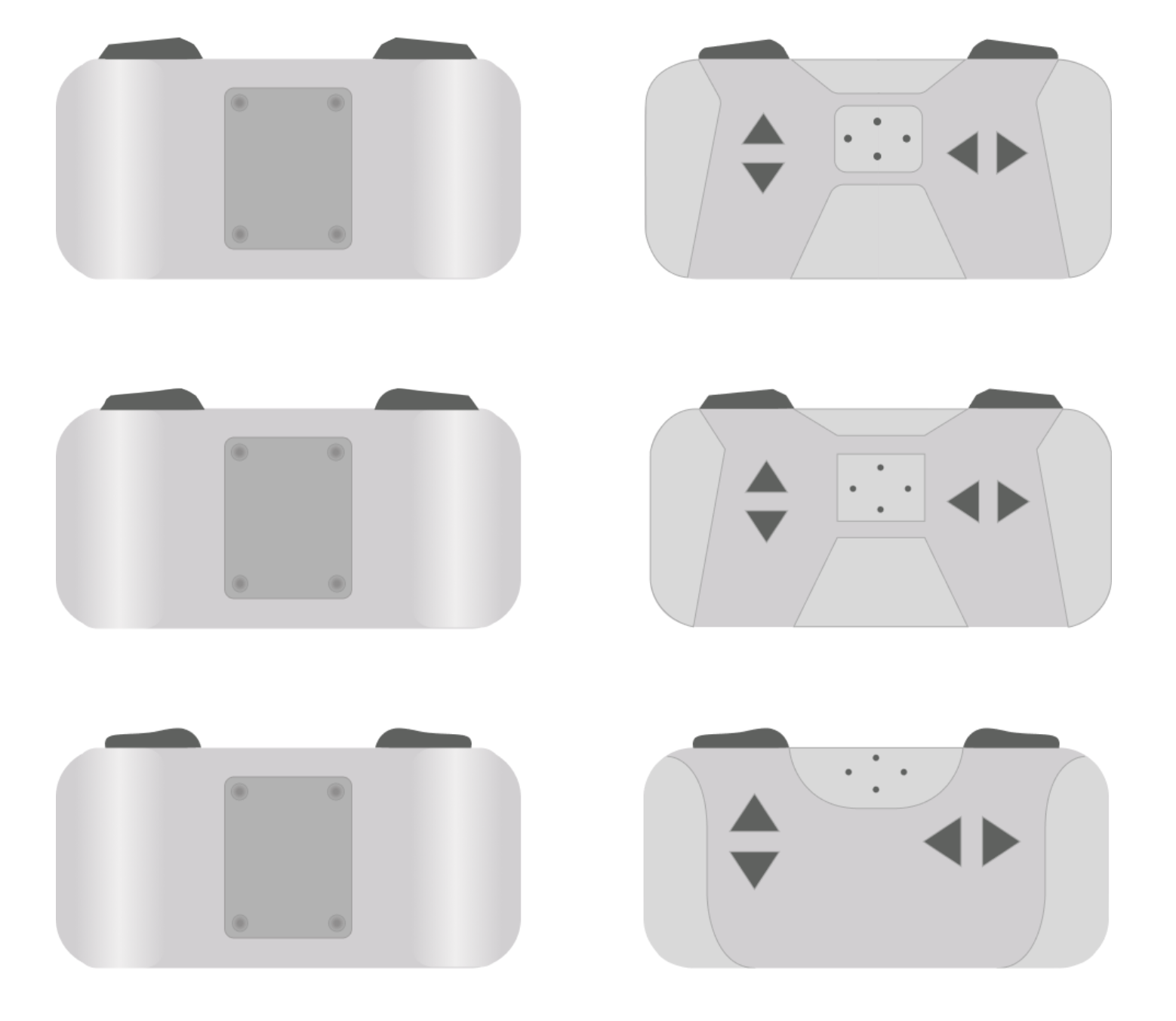
Als erstes haben wir uns eine grobe Form für den Controller überlegt und Skizzen gemacht.
Wir haben uns für das Steuerpad auf der Rückseite als Hauptsteuerelement entschieden, da wir der Meinung waren, dass das wippen des Pads in die Richtung, in die man fahren will, eine selbsterklärende Bewegung ist.
Außerdem fanden wir die Idee cool, da wir ein solches Steuerelement zuvor noch nicht an einem Controller gesehen haben.
Die Schultertasten zum Drehen des Roboters, schien für uns die simpelste Lösung zu sein.
Für das Hoch-/ Runter- und Ein-/ Ausfahrten des Roboterarms hatten wir uns vorerst für einen Slider und Pfeiltasten entschieden.
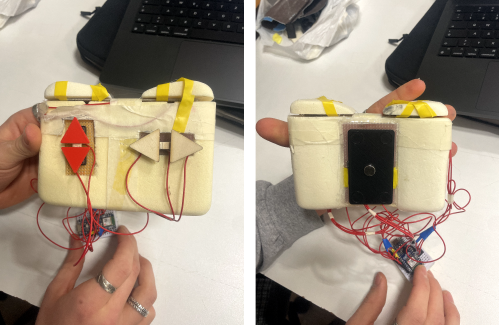
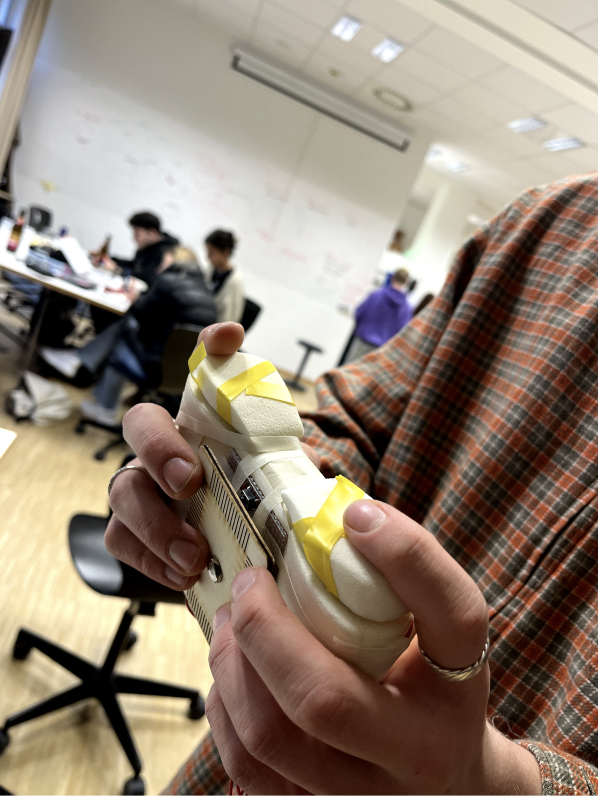
Bau des Prototypen
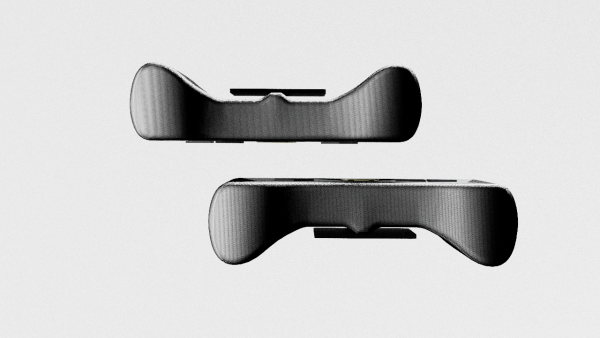
Nächster Schritt war es, nachem wir nun entgültige Form und Größen bestimmt haben, den Kneteprototypen nun nachzubauen.
Den Grundkörper haben wir aus einem hartem Schaumstoffblock herausgefeilt, um die gewünschten Rundungen zu erhalten.
Es war wichtig für uns Bedienelemente wie das steuerpad und die Schultertasten „wippbar“ zu machen, sodass man nur eine Aktion zu selben Zeit audgeführt werden kann,



Usertesting
Das Usertesting verlief gut und hat uns gute neue Erkenntnisse gebracht, die wir direkt umgesetzt haben, aber auch Bestätigung für Form und Steuerelemente, wie zum Besipielk das Steuerpad und die Schultertasten.
Dinge, die unsere User kritisiert haben, waren zum Besipiel der Slider fürs Hoch- und Runterfahren des Arms, diesen haben wir einfach durch zwei Pfeiltasten nach dem Testing ersetzt.
Der zu hohe Abstand des Pads zu den darunterliegenden Knöpfen erschwerte den Useren eine bequeme Bedienung, auch die vertikale Höhe des Pads machte das Vor- und Zürückfahren schwer.
Um diese Feheler auszubessern, haben wir das Pad und das Wippobjekt, welches sich unter dem Pad befindet, mit neuen Maßen 3D-Gedruckt
Unter anderem wurde kritisiert, dass sich die Pfeiltasten drehen, da sie nicht richtig befestigt waren, was wir aber schnell ausbessern konnten.

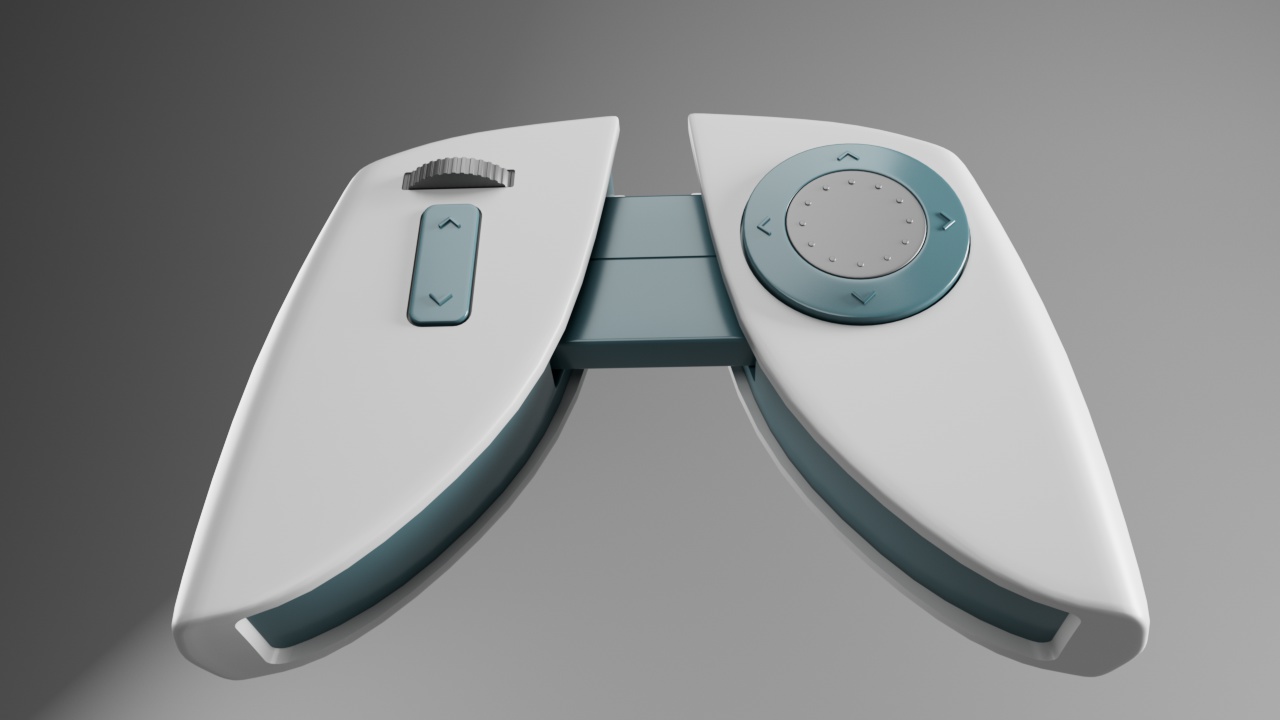
Rendering
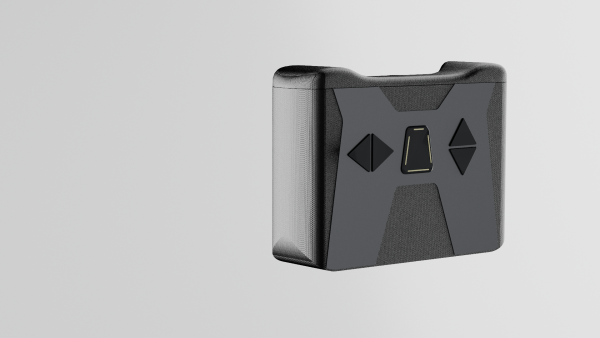
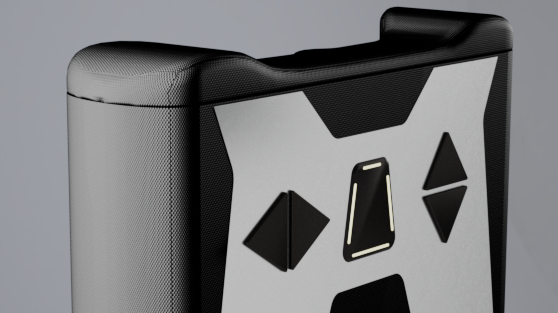
Bei unserem Rendering des Controllers haben wir uns an modernen Gaming-Controllern orientiert und haben uns für drei verschieden Materialien entschieden. Für die Buttons ein glattes Gummi, für die Greifflächen ein raues texturiertes Gummi, um einen festen Halt zu garantieren und für die freie Fläche auf der Oberseite des Controllers ein glattes Aluminium.
Die Led-Anzeige auf der Vorderseite ist beim Rendern als Idee dazugekommen und soll dem User Feedback zu dem Steuerpad auf der Rückseite geben. Es zeigt an, in welche der vier Richtungen der Controller Momentan gesteuert wird.
Otis Peissner, Gregor Baars, Joshua Quere
BetreuungProf. Michael Schuster, Prof. Carmen Hartmann-Menzel
Tags