Interface Design 1
CLUTTR

CLUTTR
Einleitung
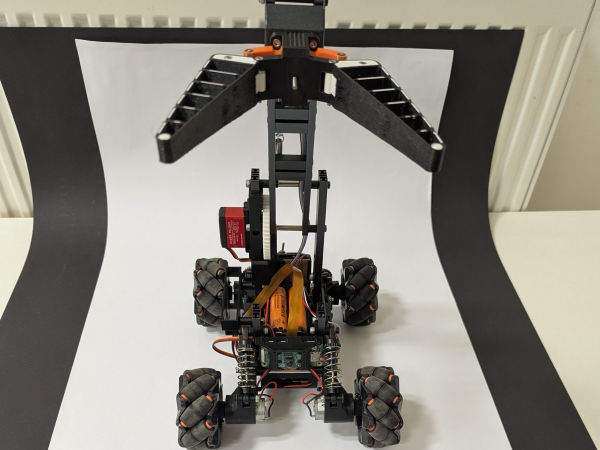
Im Fach Interface Design beschäftigten wir uns viel mit nutzerorientierter Gestaltung. Aufgabe war es passend zu einem bereitgestellten Roboter einen Controller zu entwickeln.
Die Funktionen des Roboters waren ebenfalls schon vorgegeben und galten bei der Gestaltung des Controllers zu beachten. Der Einsatzbereich und die daran gebundene Zielgruppe durften gruppenintern festgelegt und ausgearbeitet werden.
Konzept
Das grundliegende Konzept bestand aus der Entwicklung eines Controllers der sich perfekt für den Einsatz im Kinderalltag eignet.
Dafür wollten wir die Funktionen des Roboters nutzen, um Kindern den Aufräumprozess zu erleichtern und aus einer nichtgemochten Aufgabe ein spielerisches Erlebnis zu gestalten.
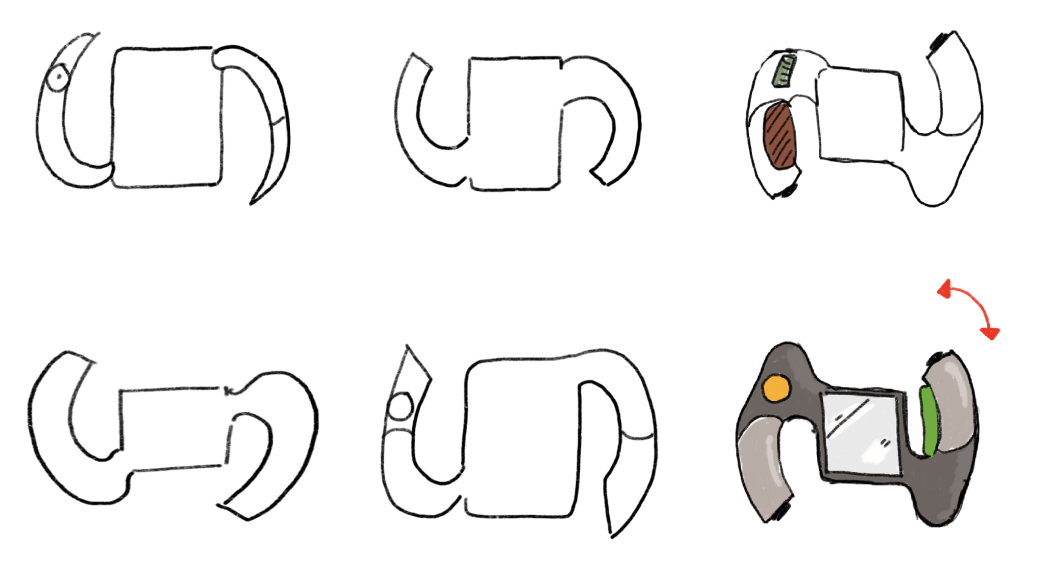
Ideenfindung
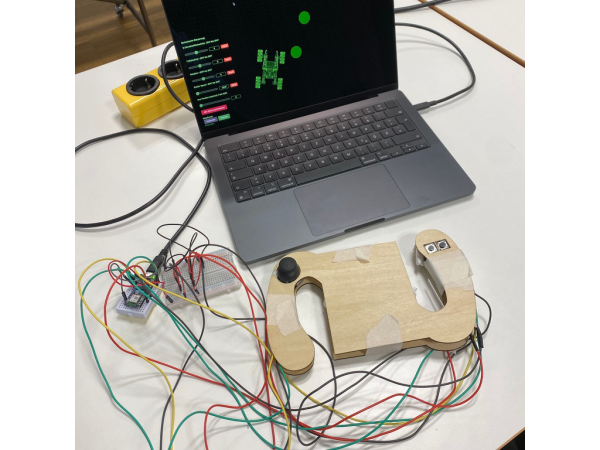
Usertesting
Um die von uns konzeptionierte Idee zu testen, wandten wir uns an Studierende der HfG Schwäbisch Gmünd.
Dabei fragten wir unter Anderem nach Vorerfahrungen mit Controllern, der Verständlichkeit der Funktionen, sowie der Ersichtlichkeit aller Bauteile. Das Fachwissen der Studierenden half uns bei der weiteren Optimierung unseres Konzepts ungemein.
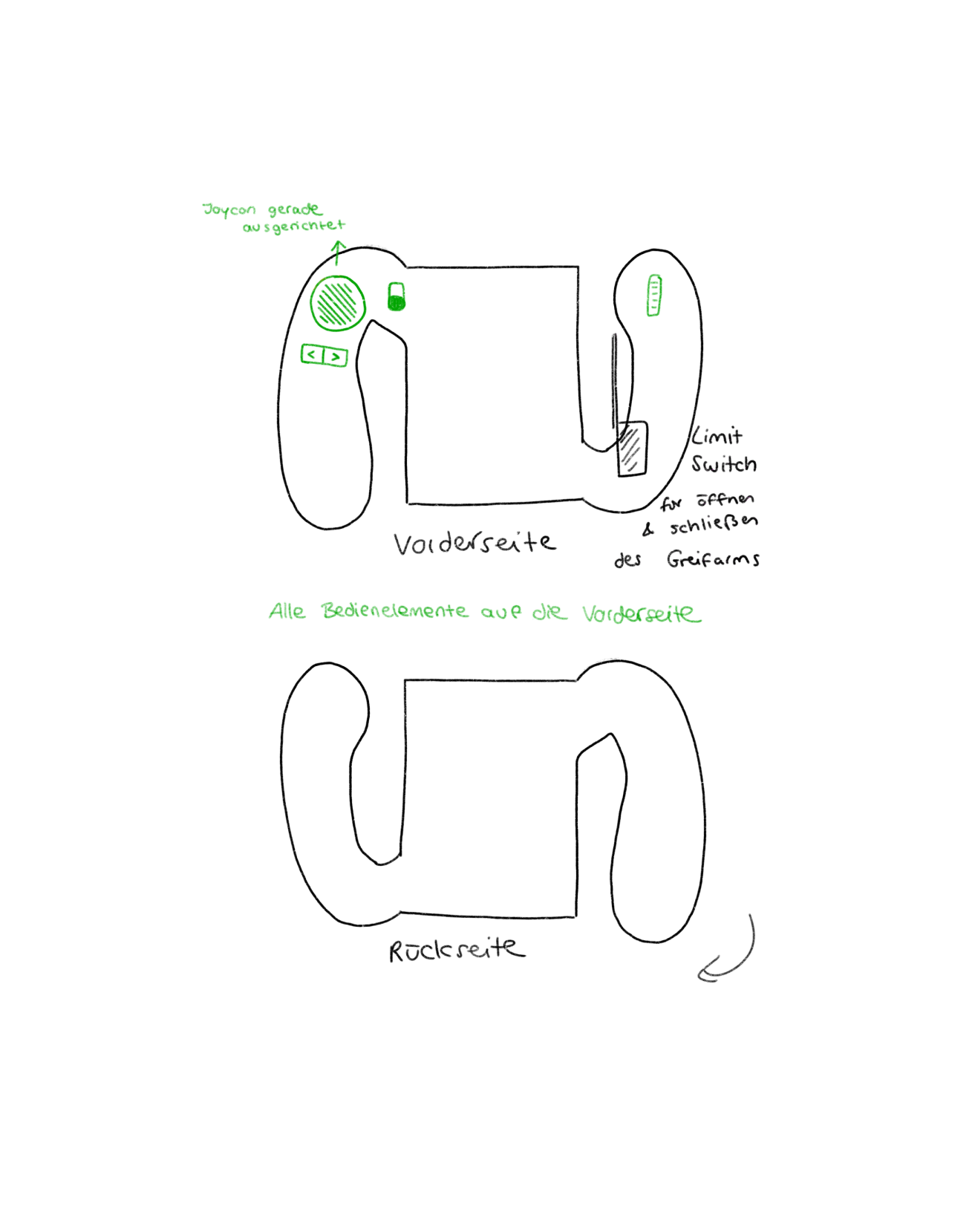
technische Umsetzung
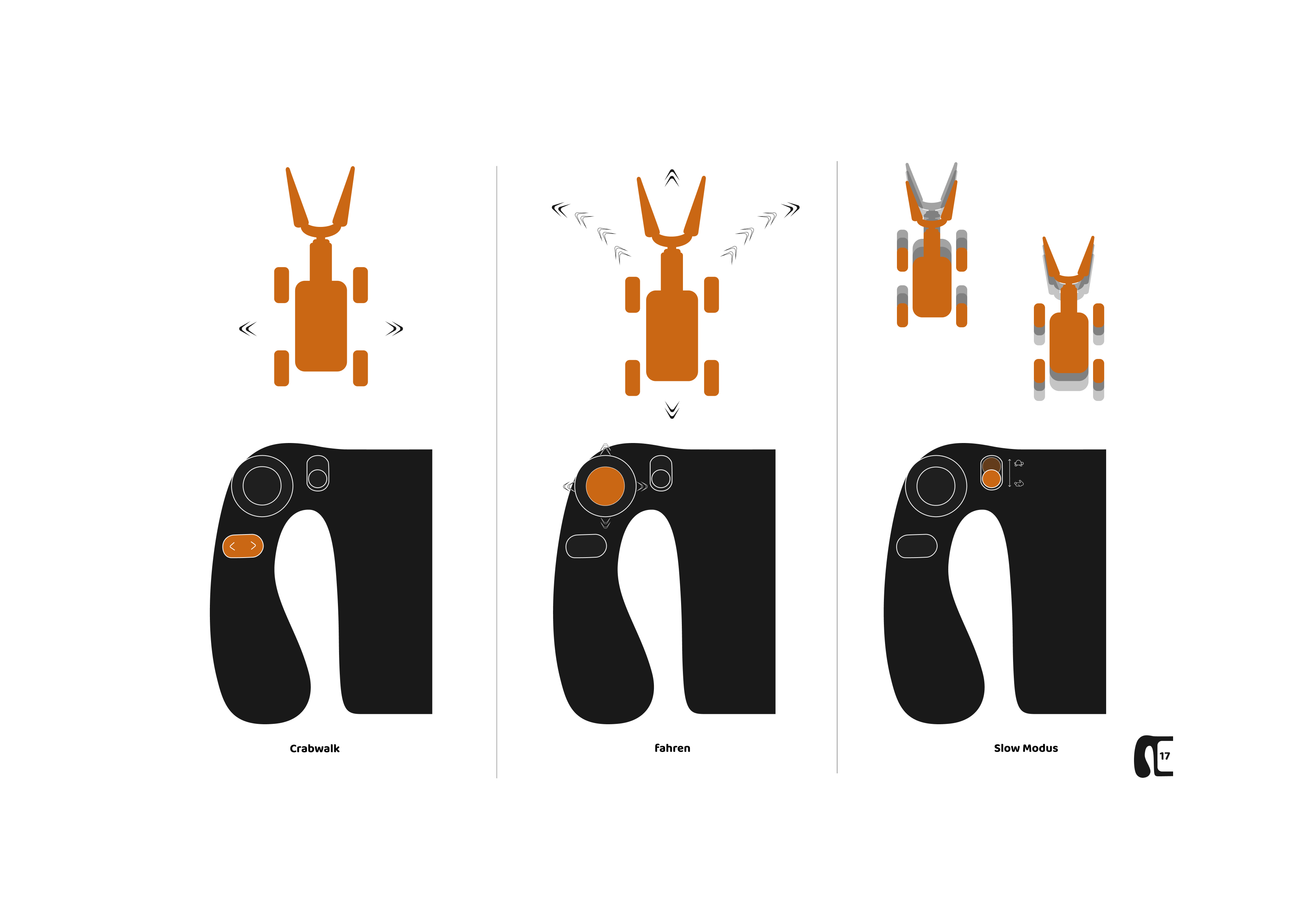
- Fortbewegung: Ein Joycon mit zwei Walzen um die zwei verschieden gemappten Achsen
visuell unterschieden zu können. - Crabwalk: Zwei Buttons in einem speziell angefertigtem 3D-gedruckten Gehäuse um Verrutschen oder Herausbrechen vorzubeugen.
- Slowmodus: Ein On/Off-Switch um die Aktivität des Slowmodus visuell ersichtlich zu machen.
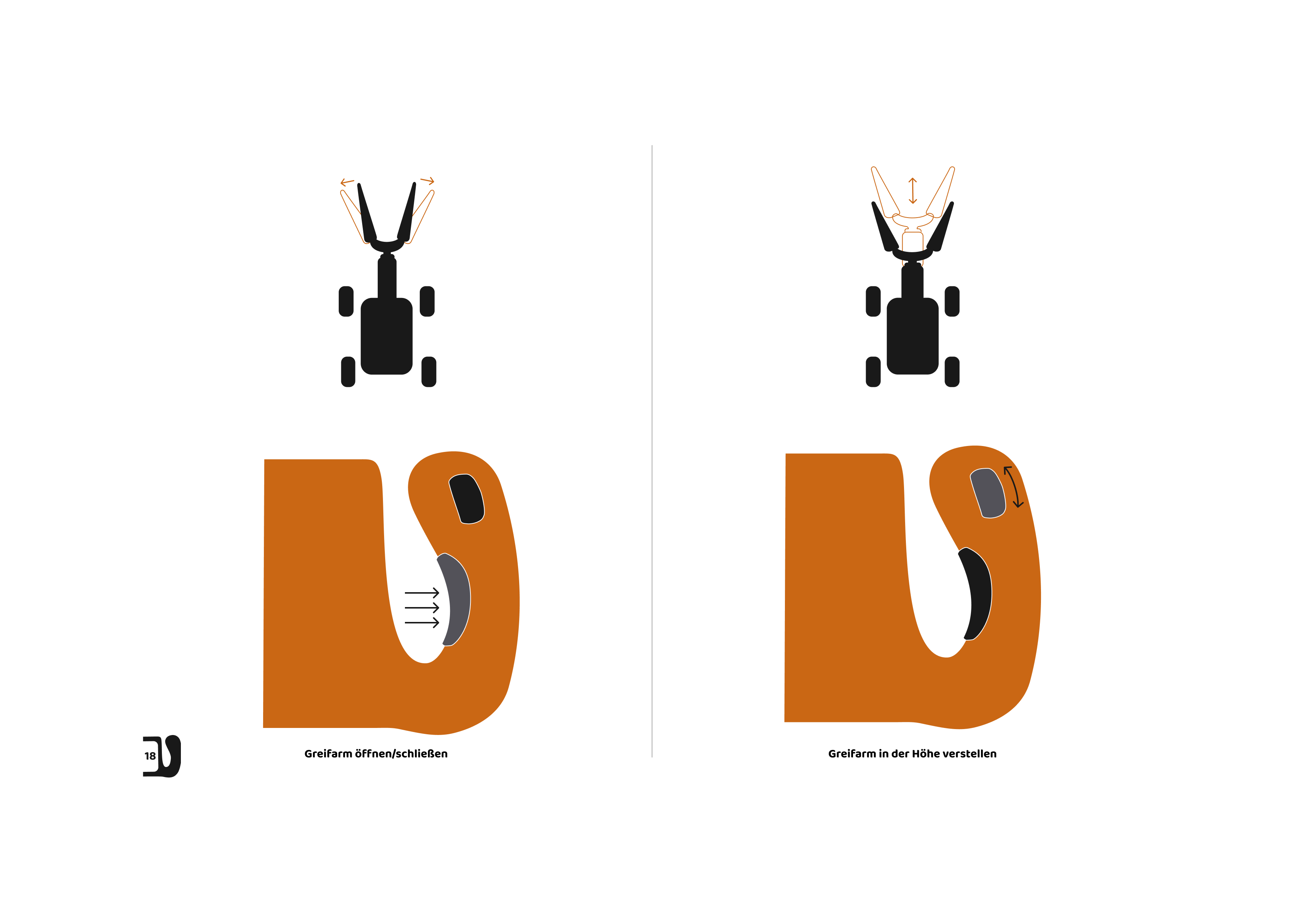
- Greifer: Ein Limit-Switch um die natürliche Bewegung des Greifens in den Controller zu integrieren.
höhenverstellbarer Greifarm: Potentiometer mit einem durch 3D-Druck speziell angefertigtem Drehrad-Aufsatz für gute Bedienbarkeit mit nur einem Daumen. - Ground- /3,3V-Hub: Ein Hub um die Stromversorgung zentral für alle Bauteile bereitzustellen und Kabel zu sparen.
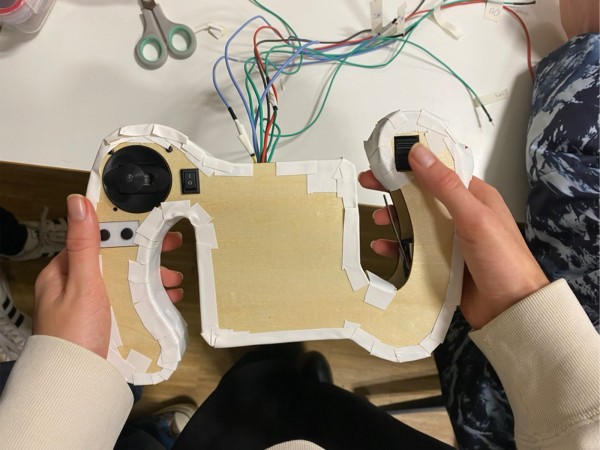
Usertesting 2
Nachdem uns die Optimierung unseres Konzepts, basierend auf der konstruktiven Kritik der HfG Studierenden und den aus dem Testing gezogenen Erkenntnissen, weitgehend gelungen war, hatten wir die Möglichkeit mit Repräsentanten unserer tatsächlichen Zielgruppe (5. Klässler einer Realschule) einen weiteren Usertest durchführen zu können. Dabei erhielten wir weitere wichtige Erkenntnisse - sowohl was die Form als auch die visuelle Gestaltung anging.
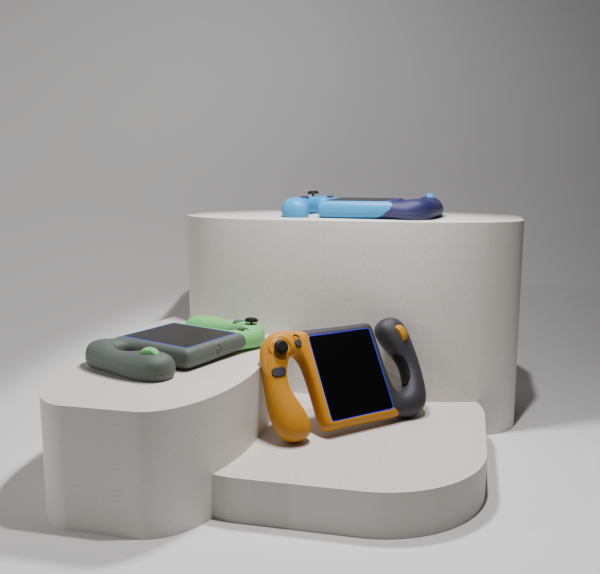
finales Konzept
Unser finales Konzept vereint eine spielerische Form mit Ergonomie und Funktionalität. Die Platzierung der Bauteile wurde so verändert, dass eine Zweiteilung der Funktionen - zum Einen die Steuerung des Roboters selbst, zum Anderen für die Interaktion mit dem Greifarms - erfolgt. Diese räumliche Aufteilung spiegelt sich auch in der visuellen Gestaltung wieder.
Yannik Stegmaier, Cosima Bühler, Paula Grimm
BetreuungProf. Michael Schuster, Anna Raveling
Tags