Interface Design 1
haptiq

Wie lassen sich komplexe Roboterbewegungen so steuern, dass sie sich natürlich, präzise und sicher anfühlen?
In diesem Projekt haben wir einen experimentellen Controller entwickelt, der Roboterbewegungen nicht über klassische Buttons, sondern über direkte körperliche Bewegung und haptisches Feedback steuerbar macht.
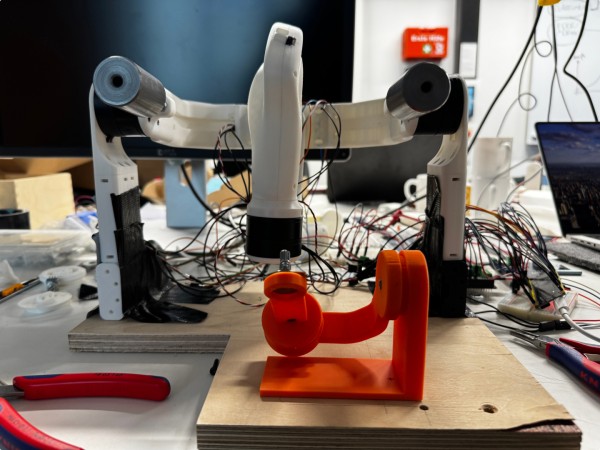
Im Zentrum von haptiq steht eine kardanische Aufhängung, die Bewegungen im dreidimensionalen Raum ermöglicht. Ergänzt wird sie durch Force Feedback, das dem Nutzer Kräfte, Widerstände und Grenzen physisch erfahrbar macht.
Grundidee
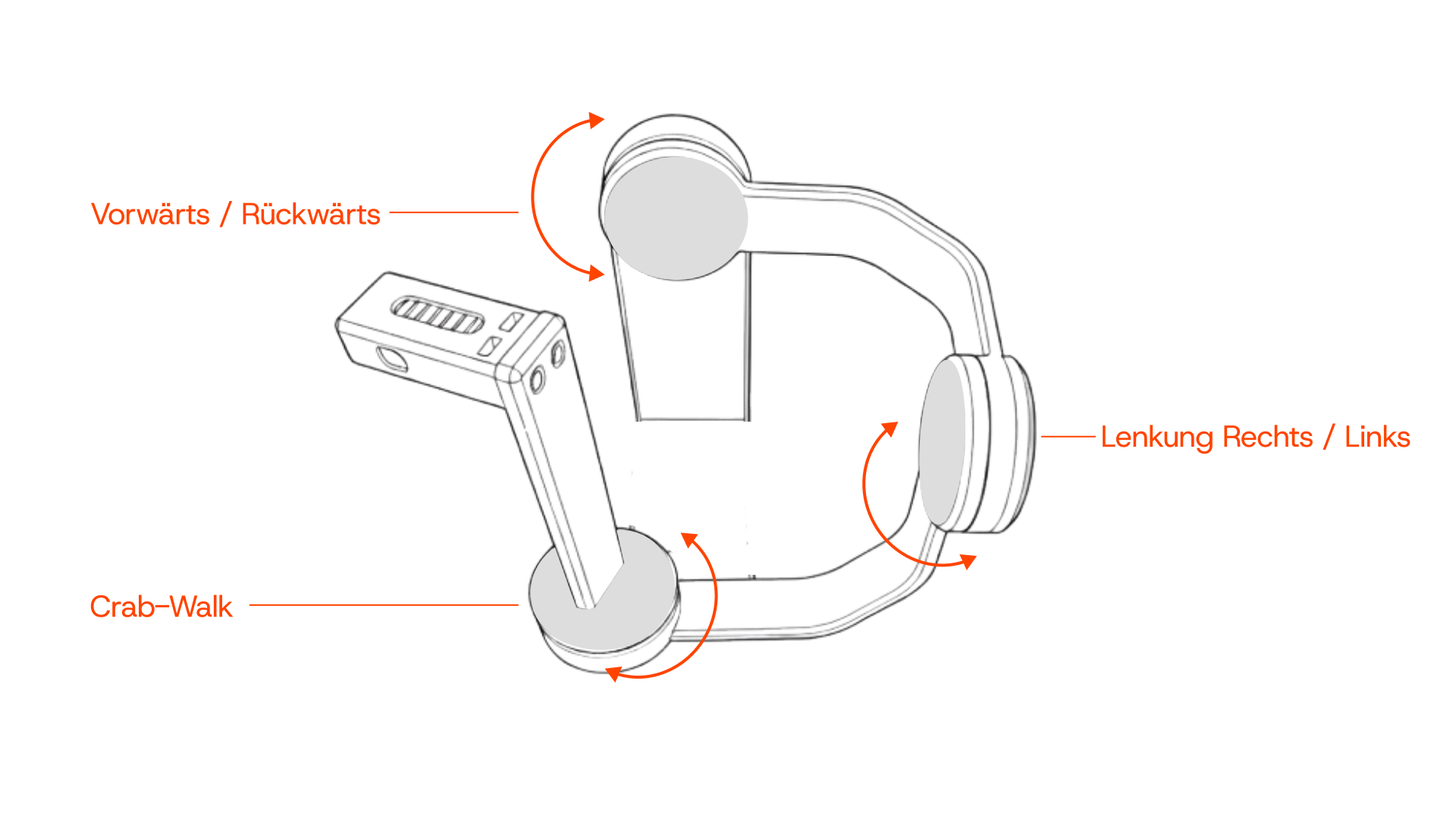
Die Aufgabe bestand darin, einen Controller zu entwerfen, der die vielfältigen Bewegungen eines Roboters wie Fahren, Lenken, diagonales Verfahren (Crab-Walk) und Greifarmsteuerung in einem einzigen Interface bündelt.
Dabei war es uns wichtig, über bekannte Steuerungslogiken hinauszugehen und Interaktion grundlegend neu zu denken.

Unsere zentrale Idee war die Nutzung einer kardanischen Aufhängung als Eingabegerät. Bekannt ist dieses Prinzip unter anderem aus Kamera-Gimbals oder aus der Medizintechnik. Statt Stabilisierung wollten wir die freie Beweglichkeit gezielt als Interaktion nutzen. Jede Bewegung der Hand sollte möglichst direkt und nachvollziehbar auf den Roboter übertragen werden.
Force Feedback als Erweiterung der Interaktion
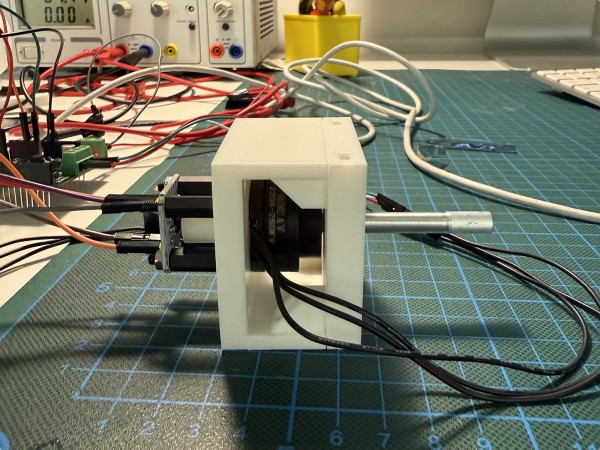
Ein zentrales Merkmal unseres Controllers ist das integrierte Force Feedback.
Über Brushless DC Motoren werden Kräfte in Echtzeit an den Nutzer zurückgegeben. Diese äußern sich als Widerstände, Begrenzungen oder feine Vibrationen.
Dadurch entsteht ein zusätzlicher Kommunikationskanal zwischen Mensch und Maschine. Der Nutzer erhält nicht nur visuelle Rückmeldung, sondern spürt unmittelbar, wie der Roboter auf seine Eingaben reagiert. Das erhöht sowohl die Präzision als auch die Sicherheit bei der Steuerung.
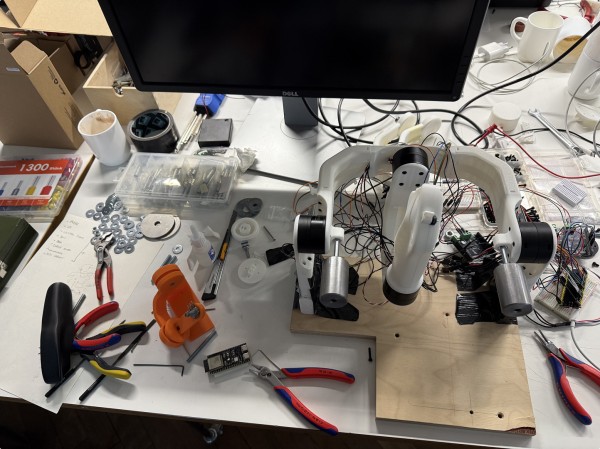
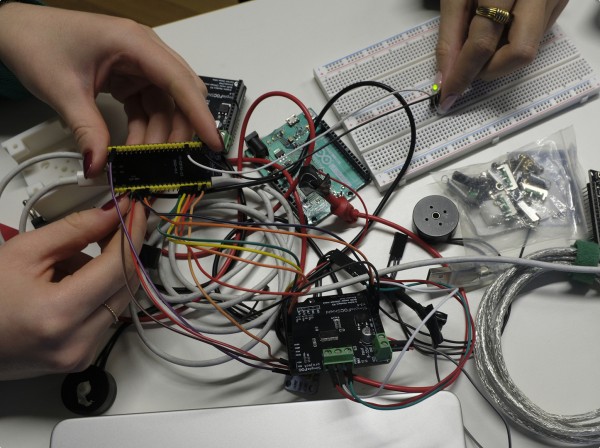
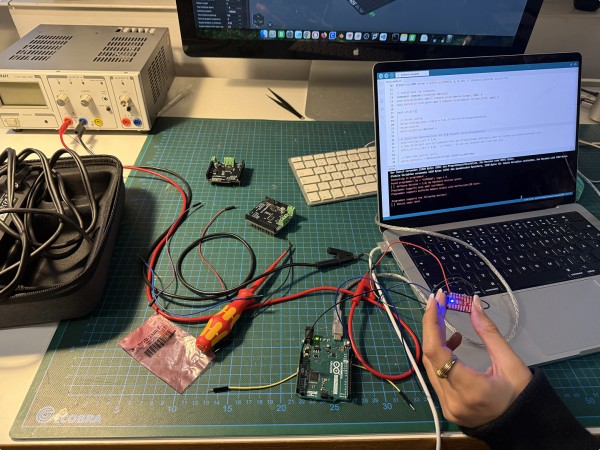
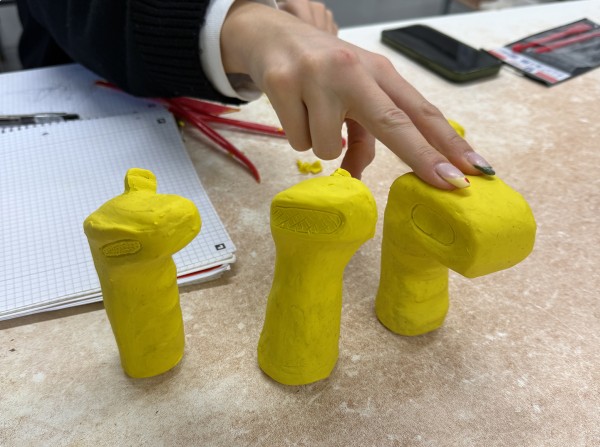
Prozess und Prototypenentwicklung
Unser Entwicklungsweg war geprägt von Iterationen und stetiger Optimierung. Durch den Bau früher Prototypen gelang es uns, die räumliche Logik der kardanischen Aufhängung zu verstehen und das Achsen-Layout festzulegen. Ein zentraler Wendepunkt war die Erkenntnis, dass die Standardmotoren für die Last nicht ausreichten. Durch den Wechsel auf spezialisierte Gimbal-Motoren mussten wir die Konstruktion zwar grundlegend neu denken, konnten so aber die nötige Kraft für ein überzeugendes Force-Feedback sicherstellen.

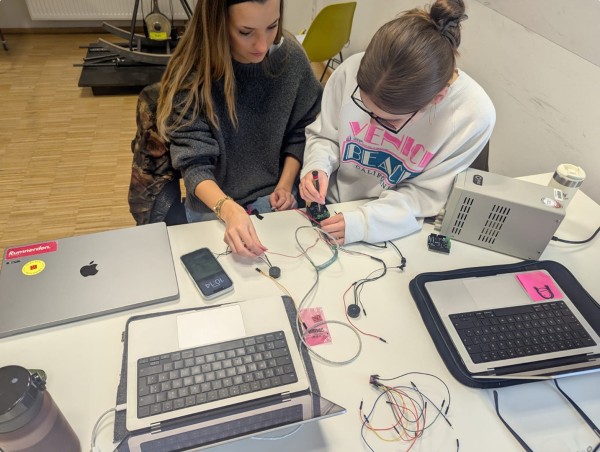
User Tests
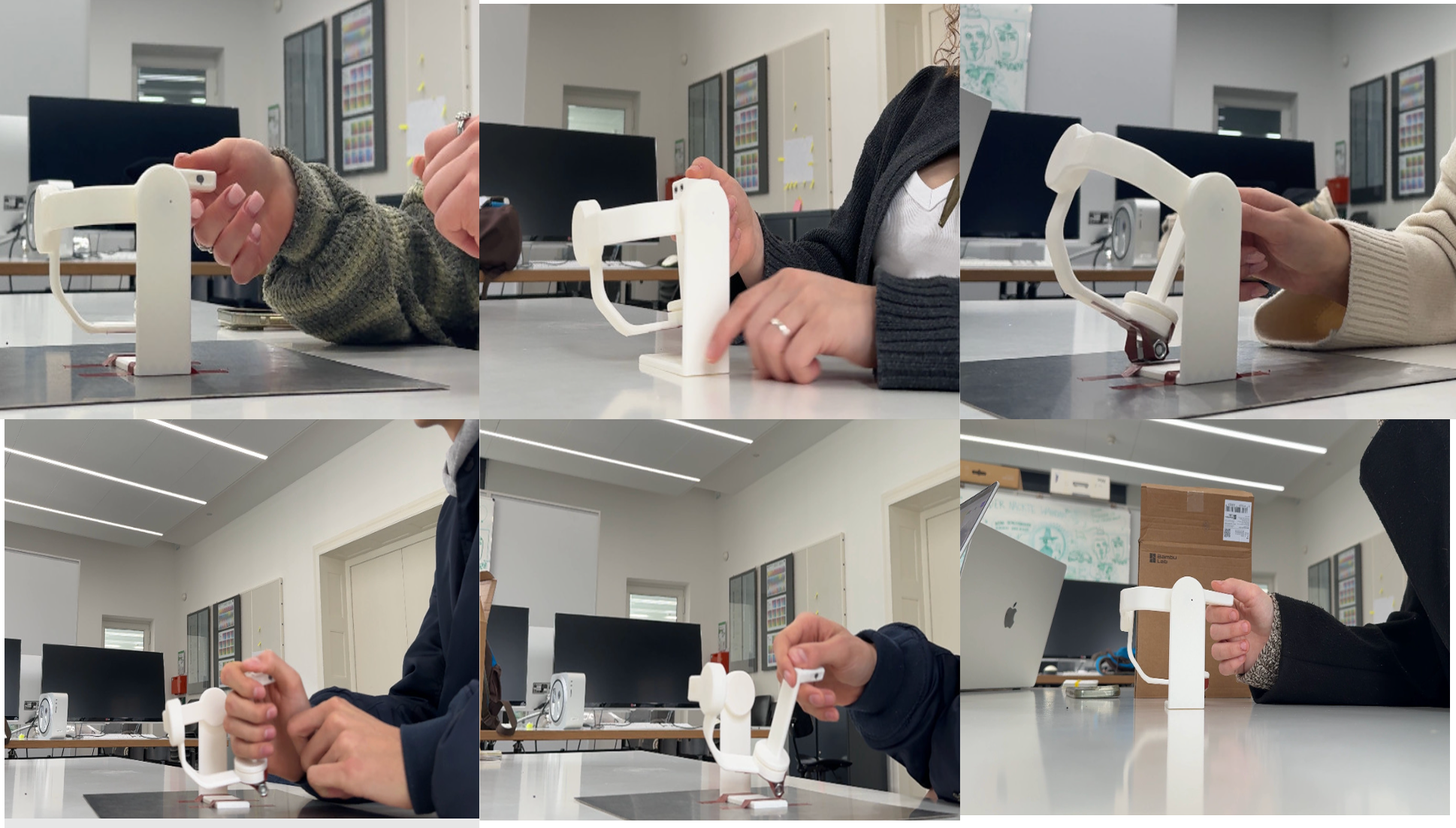
Um die Intuitivität unseres Konzepts zu überprüfen, führten wir mehrere User Tests durch. Dabei zeigte sich, dass die Zuordnung der Bewegungsachsen größtenteils gut verstanden wurde, das ursprüngliche Greifinterface jedoch nicht die gewünschte Klarheit bot.
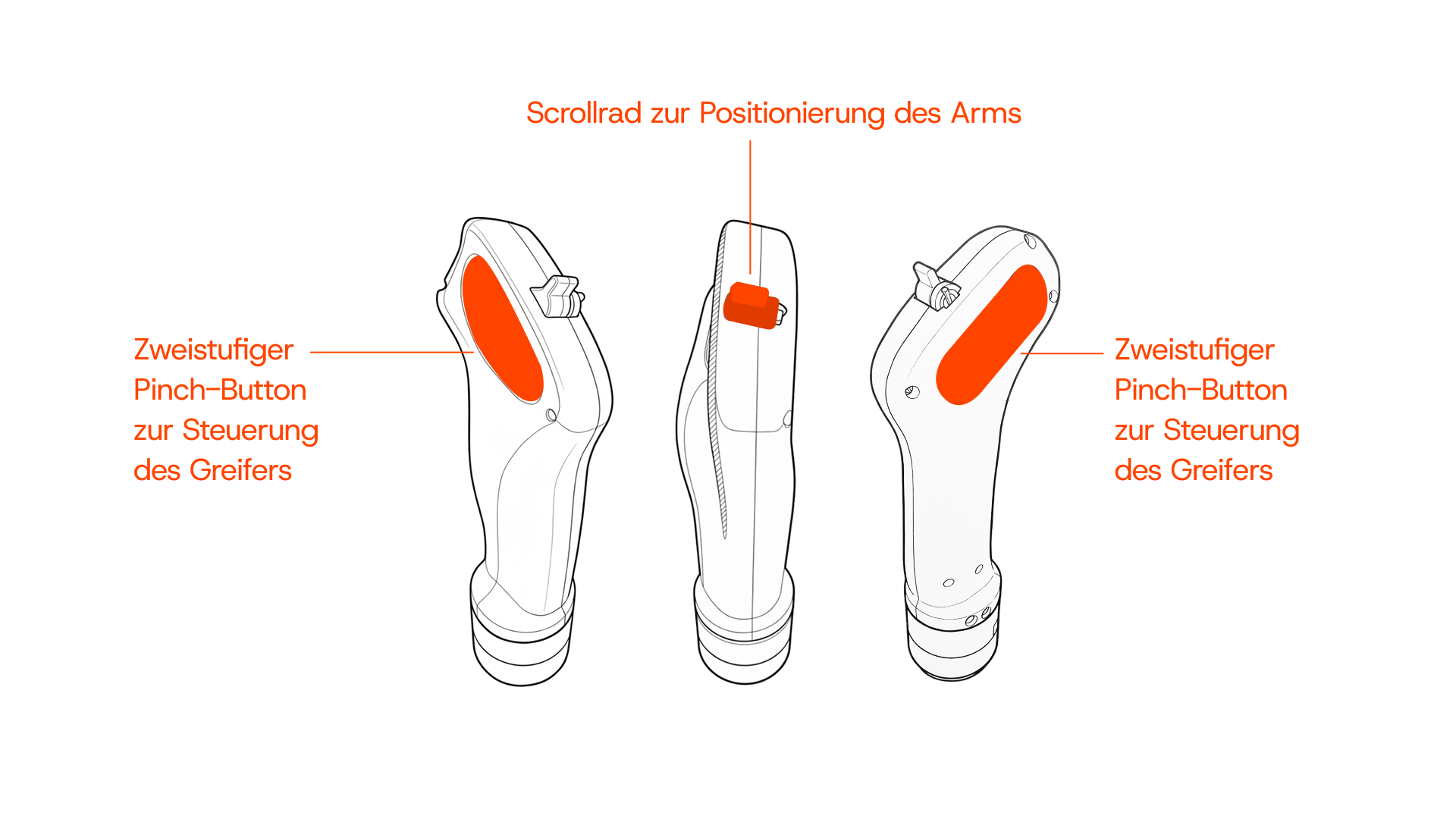
Auf Grundlage dieses Feedbacks entschieden wir uns, das Greifkonzept grundlegend zu überarbeiten. Statt einer komplexen Mechanik entwickelten wir einen ergonomischen, joystickähnlichen Griff, der eine klare Affordance bietet und sofort verständlich ist.
Einsatzszenario im Forschungslabor
Als konkreten Use Case wählten wir ein Forschungslabor.
Der Controller steuert hier einen Roboter, der mit hochinfektiösen Proben oder gefährlichen Substanzen arbeitet. Die Bedienung erfolgt räumlich getrennt vom eigentlichen Arbeitsbereich, etwa durch eine Glaswand oder über eine Bildschirmübertragung.
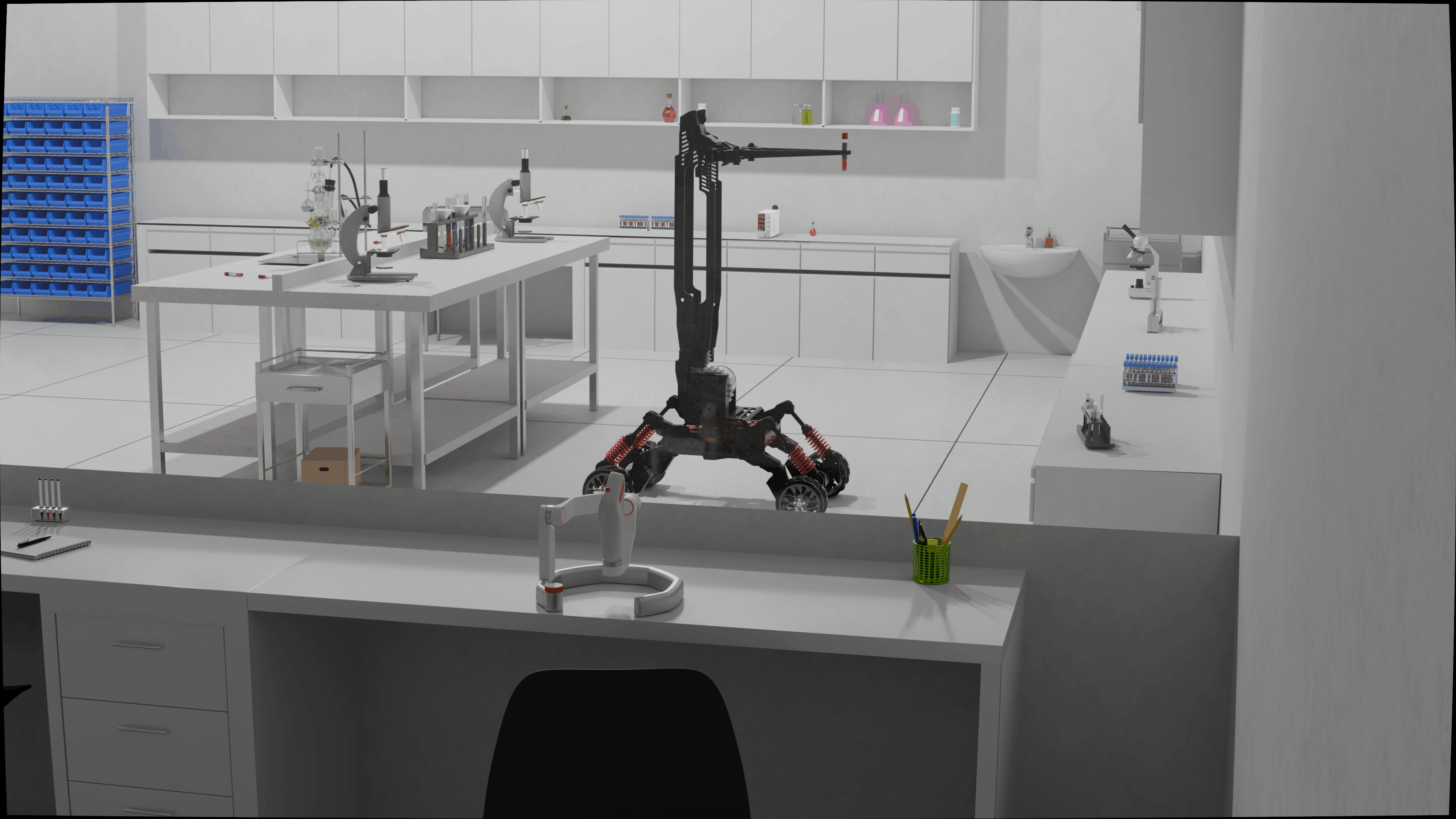
Die einhändige Bedienung ermöglicht es, parallel weitere Aufgaben auszuführen. Durch die kardanische Aufhängung fühlt sich die Steuerung unmittelbar und natürlich an. Zusätzlich erlaubt das Force Feedback eine sichere und kontrollierte Interaktion. Einzelne Achsen können bei Bedarf gesperrt werden, um besonders ruhige und präzise Bewegungen zu ermöglichen.
Design und Materialien

Der Designprototyp übersetzt die technische Idee in eine reduzierte und funktionale Formensprache.
Matte, helle Oberflächen und Edelstahl verweisen auf den Labor-Kontext, während gezielte orangefarbene Akzente die Interaktionselemente hervorheben.
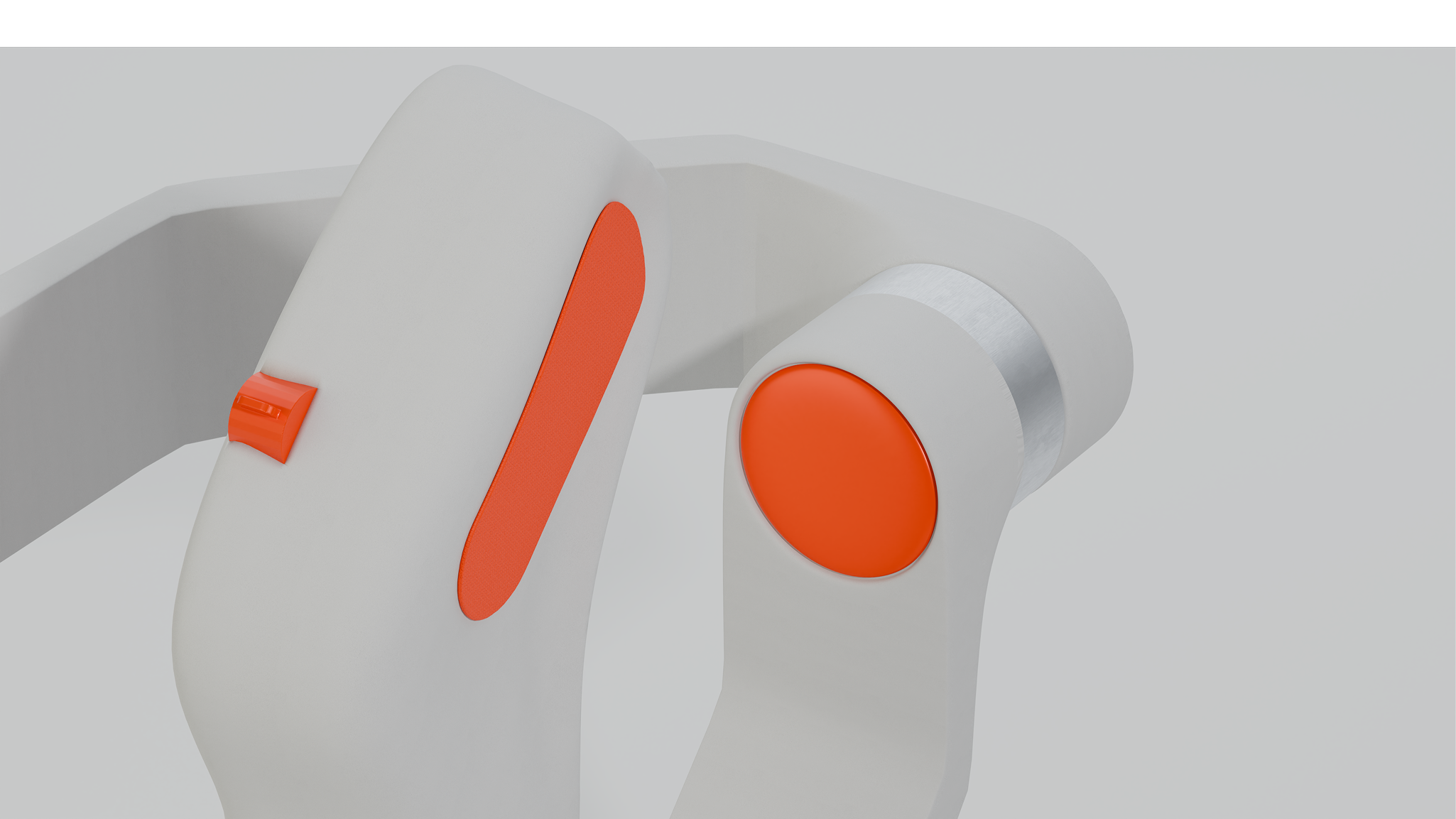
Eine gummierte Oberfläche mit feinen Mikrotexturen verbessert den Halt und unterstützt die haptische Orientierung. Der Griff ist so gestaltet, dass er auch ohne visuelle Kontrolle sicher und intuitiv bedient werden kann.
Ausblick und Weiterentwicklung
haptiq dient als Basis für eine Plattform, in dem haptische Kräfte zur primären Interaktionsform werden. Dabei steht die Gestaltung von Force-Feedback-Patterns im Vordergrund, die eine effiziente Unterstützung im Workflow bietet. Wir sehen in dieser Technologie den Schlüssel, um die Distanz zu virtuellen oder remote-gesteuerten Umgebungen zu überbrücken und diese durch haptische Sinne physisch erfahrbar zu machen.

Klara Richter, Carla Konrad, Luzian Haebe
BetreuungProf. Michael Schuster, Anna Raveling
Tags