Interface Design 1
GrippR
Ideenfindung
Zu Beginn sammelten wir Ideen, wie eine intuitive und funktionale Steuerung für einen Roboter mit Greifarm aussehen könnte. Wichtig war uns dabei, einen innovativen und minimalistischen Controller zu entwickeln, der dennoch nicht auf physisches Feedback und intuitive Bedienung verzichtet.
Unser entscheidender Durchbruch war die Idee, das Scherenprinzip aus alltäglichen Greifbewegungen zu übernehmen, um eine direkte haptische Verbindung zwischen Nutzer und Roboter herzustellen.
Funktionen
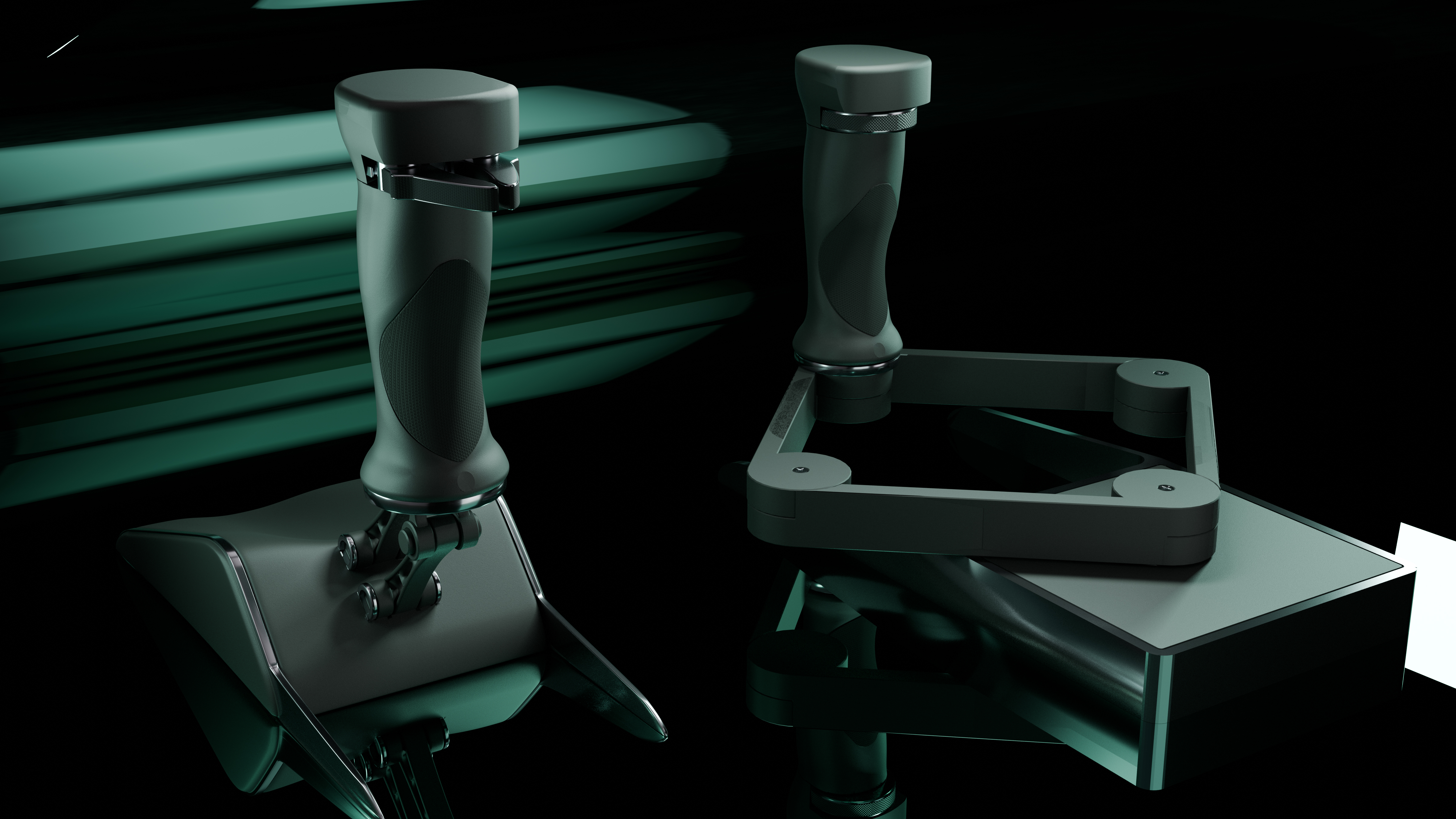
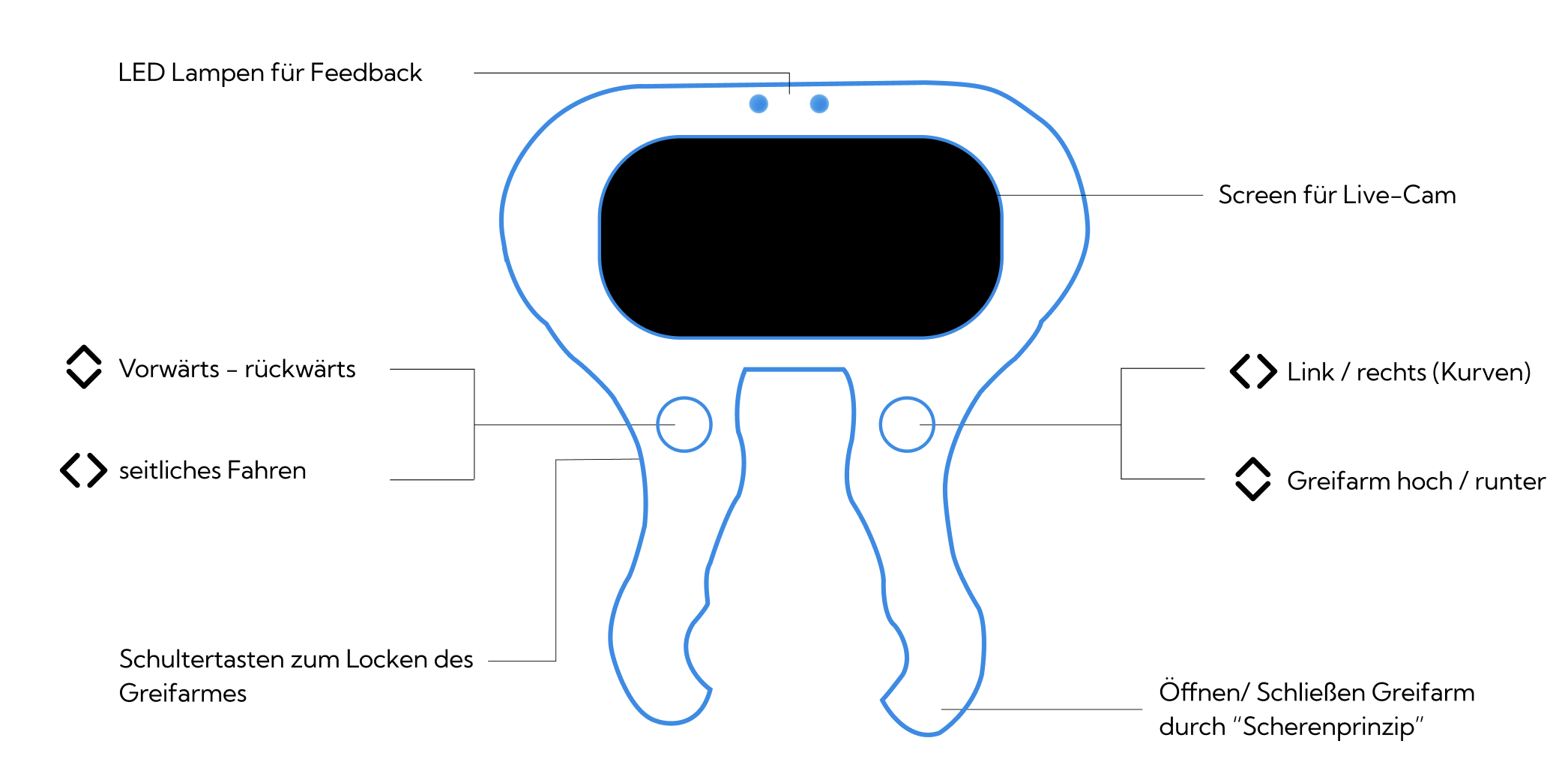
Zwei Joysticks ermöglichen eine präzise und intuitive Steuerung des Roboters: Der linke Joystick steuert Vorwärts-, Rückwärts- und Seitwärtsbewegungen, während der rechte Joystick Drehungen übernimmt und in Kombination mit dem linken für präzises Kurvenfahren sorgt.
Die Controller-Arme bewegen sich nach innen und außen, um die Greifarme des Rovers direkt zu imitieren und ein haptisches, natürliches Steuergefühl zu schaffen. Schultertasten auf der Rückseite der Arme ermöglichen das Fixieren und Lösen der Armbewegungen, wodurch die Nutzung komfortabler wird.

Formprototypen
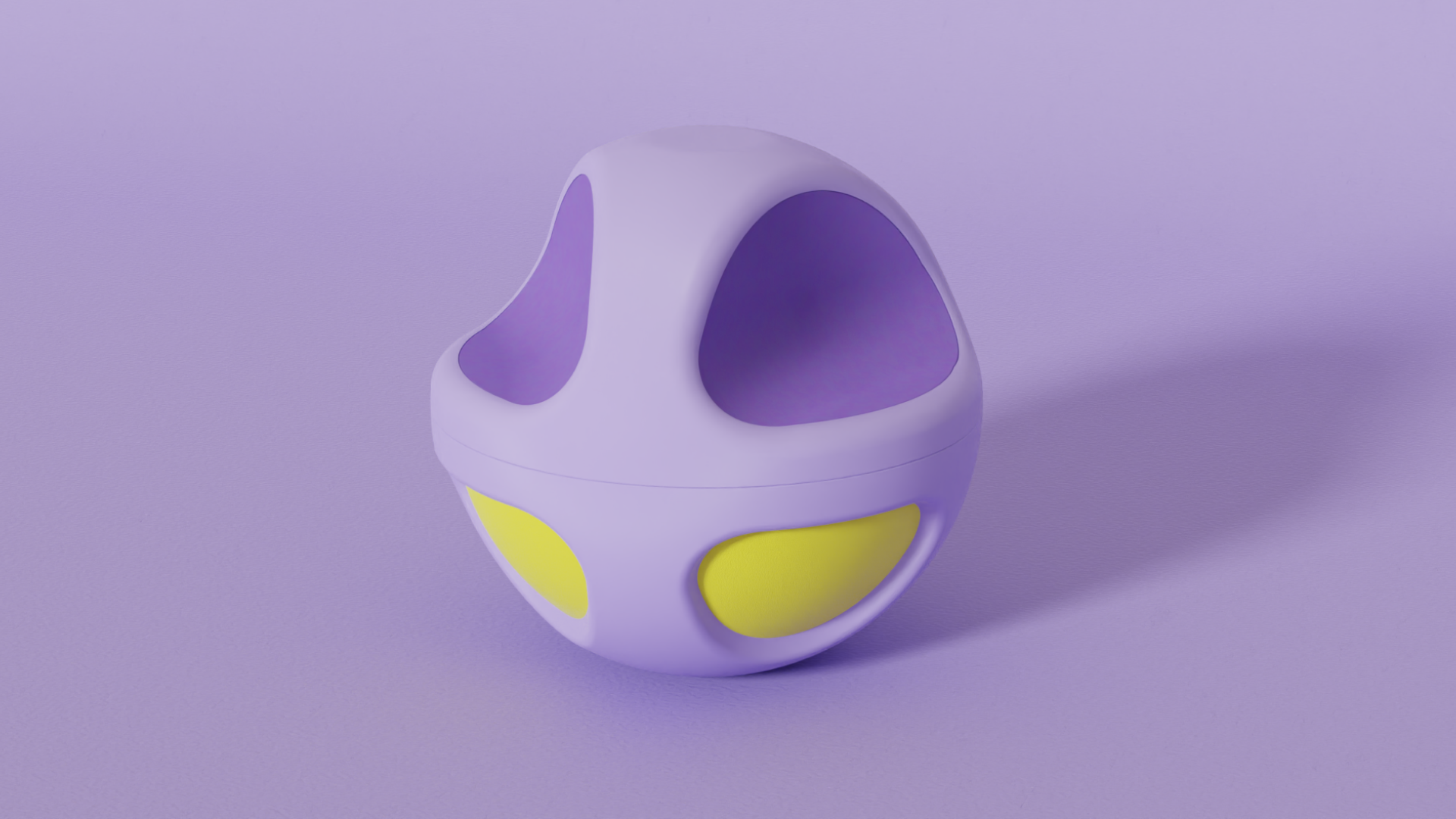
Nach der Funktionsdefinition entwickelten wir erste Skizzen und Designideen, um die passende Form für unseren Controller zu finden. Dabei experimentierten wir mit verschiedenen Formen und Größen, um eine ergonomische und verständliche Gestaltung zu erreichen. Die Varianten reichten von runden bis kantigeren Designs und halfen uns, die beste Balance zwischen Handhabung, Intuition und technischer Wirkung zu finden.
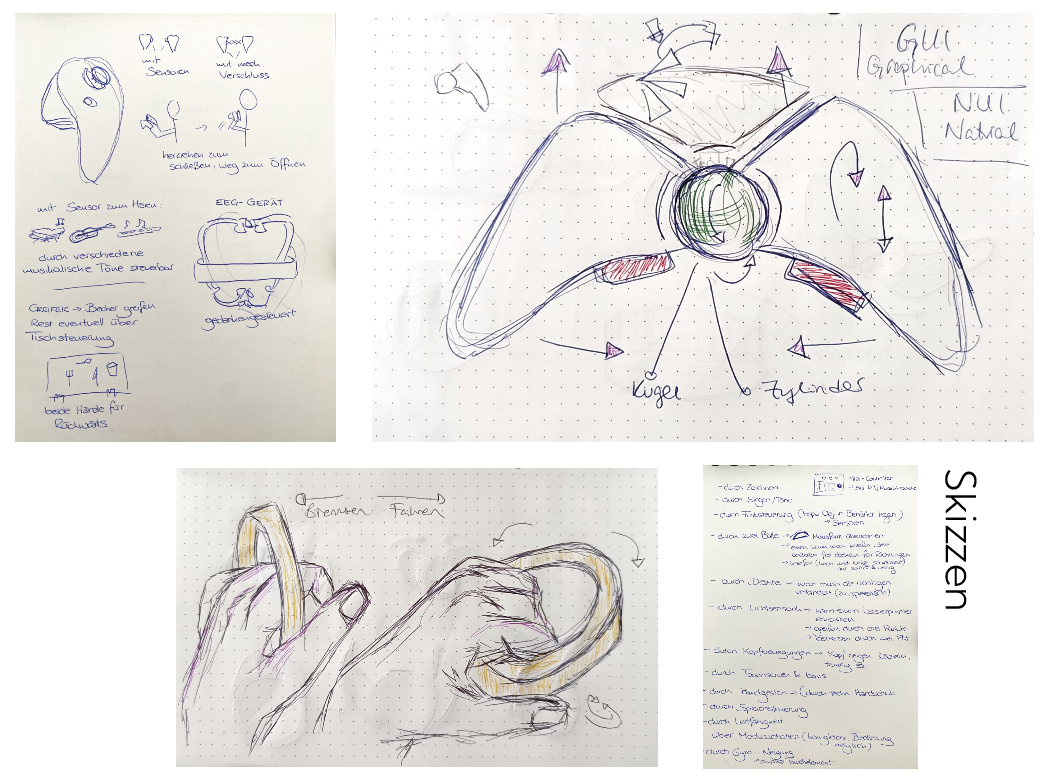
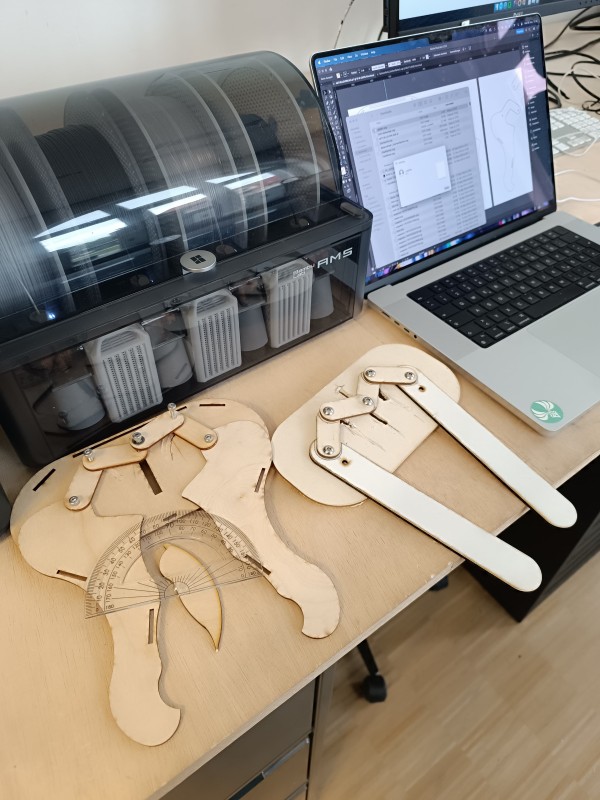
Die ersten Formprototypen haben wir zunächst aus Pappe und Klebeband konstruiert, um ein Gefühl für die Formen und Proportionen zu bekommen.
(Foto Laserprototyp)
Usability Test-I
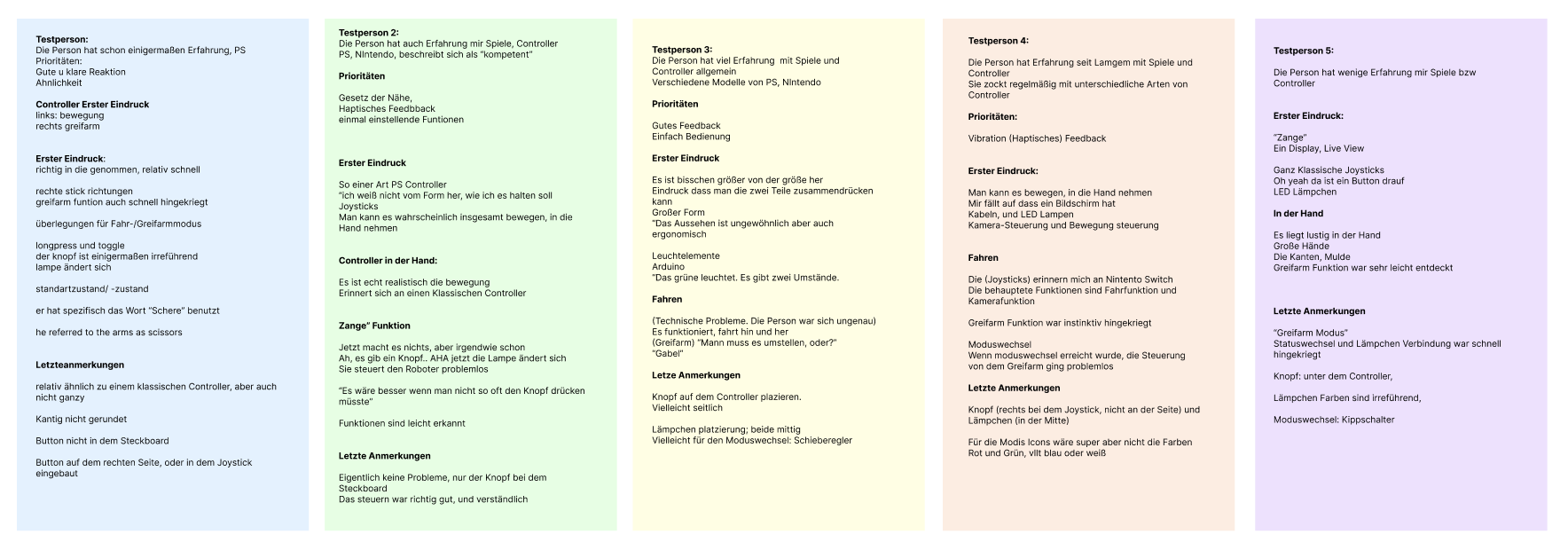
In ersten Usability-Tests testeten Nutzer ohne Vorerfahrung alle Funktionen und gaben Feedback zur Steuerung, Haptik und Verständlichkeit. Es zeigte sich, dass einige Abläufe unklar waren und die Form noch nicht selbsterklärend wirkte.
Optimierung
Nach dem ersten Usability-Test haben wir die Funktionen und die Optik unseres Controllers optimiert. Wir überarbeiteten die Steuerung, entfernten den Modiswitch und passten Form und Ergonomie an. Ziel war es, eine intuitivere Steuerung und eine klarere Funktionserkennung zu erreichen.
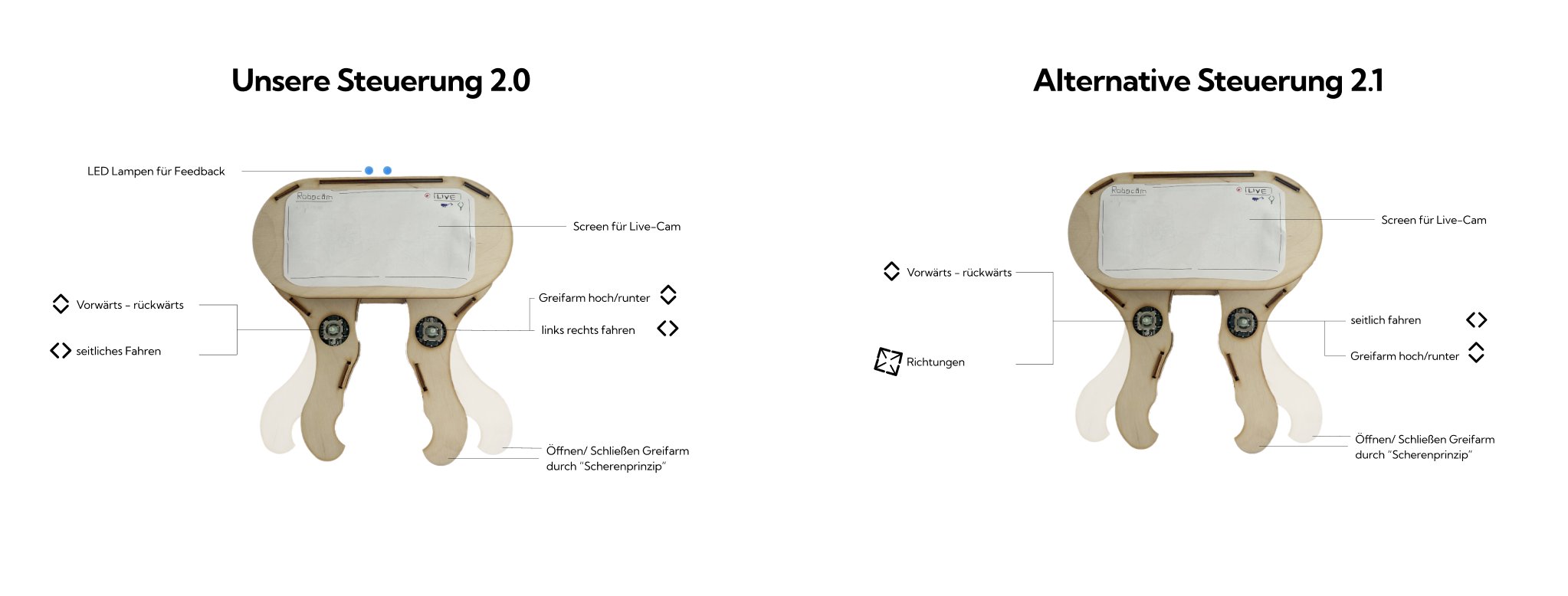
Usability Test-II
In diesem Test überprüften wir die optimierte Version unseres Controllers sowie eine alternative Steuerungsmethode, um herauszufinden, welche Steuerung intuitiver und komfortabler ist. Durch einen A/B-Test konnten wir die beiden Varianten direkt vergleichen und die beste, intuitivste Steuerung für unser Endkonzept auswählen.
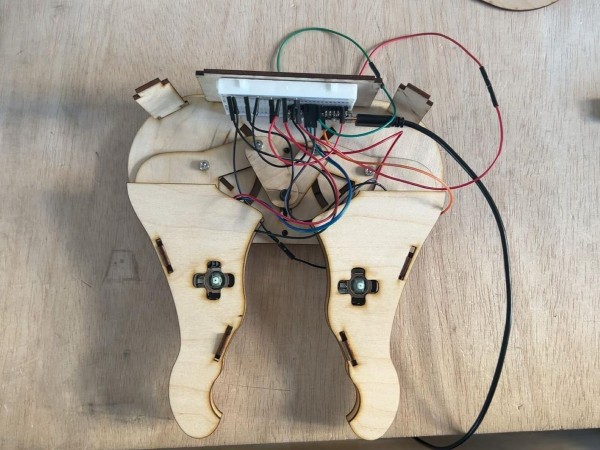
Funktionsprototyp

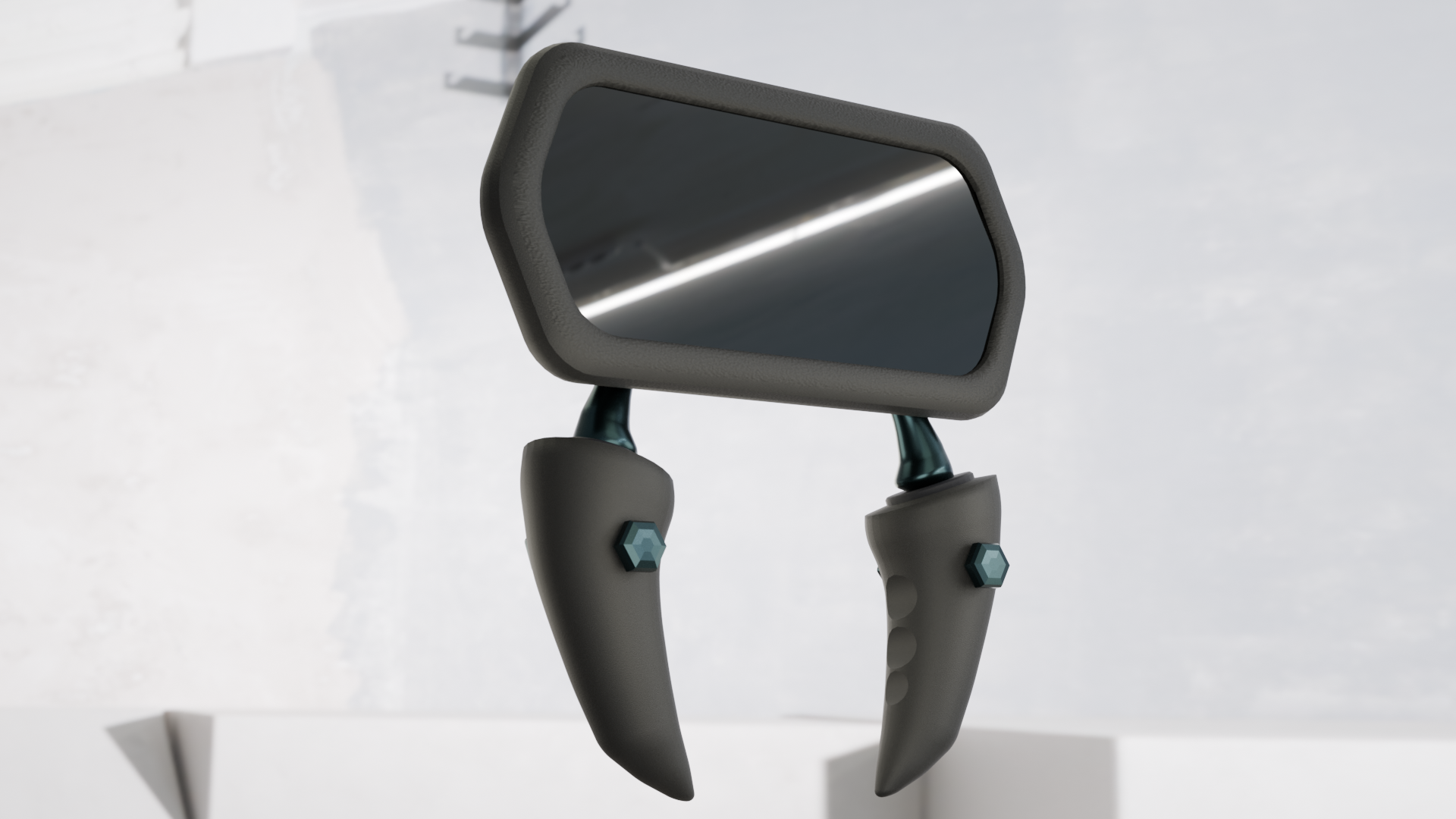
Beim Funktionsprototyp optimierten wir Größe, Proportionen und Form, um den Controller so ergonomisch und organisch wie möglich zu gestalten. Alle Funktionen konnten direkt getestet und in einer kompakten, benutzerfreundlichen Bauweise umgesetzt werden.
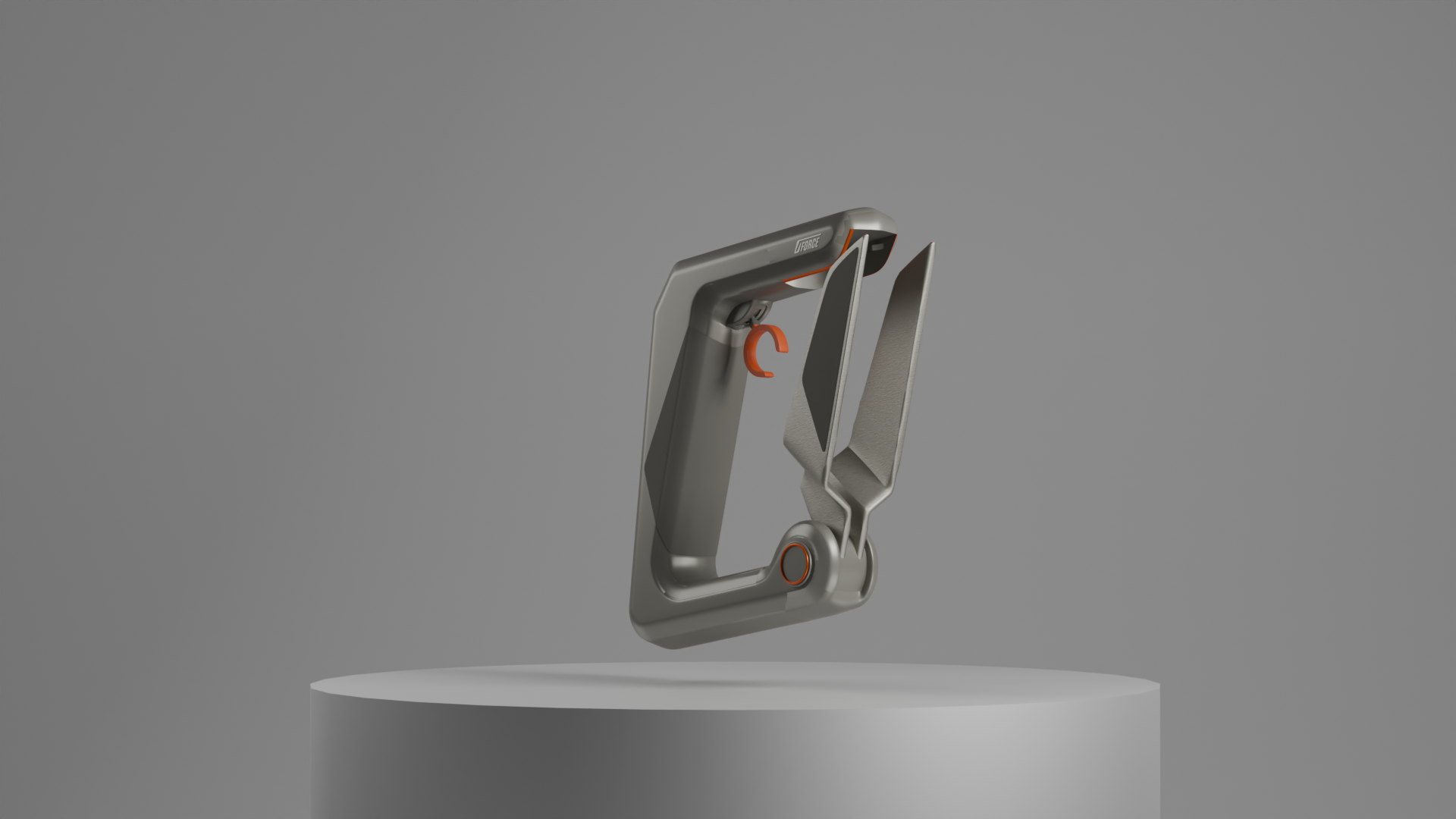
Designprototyp
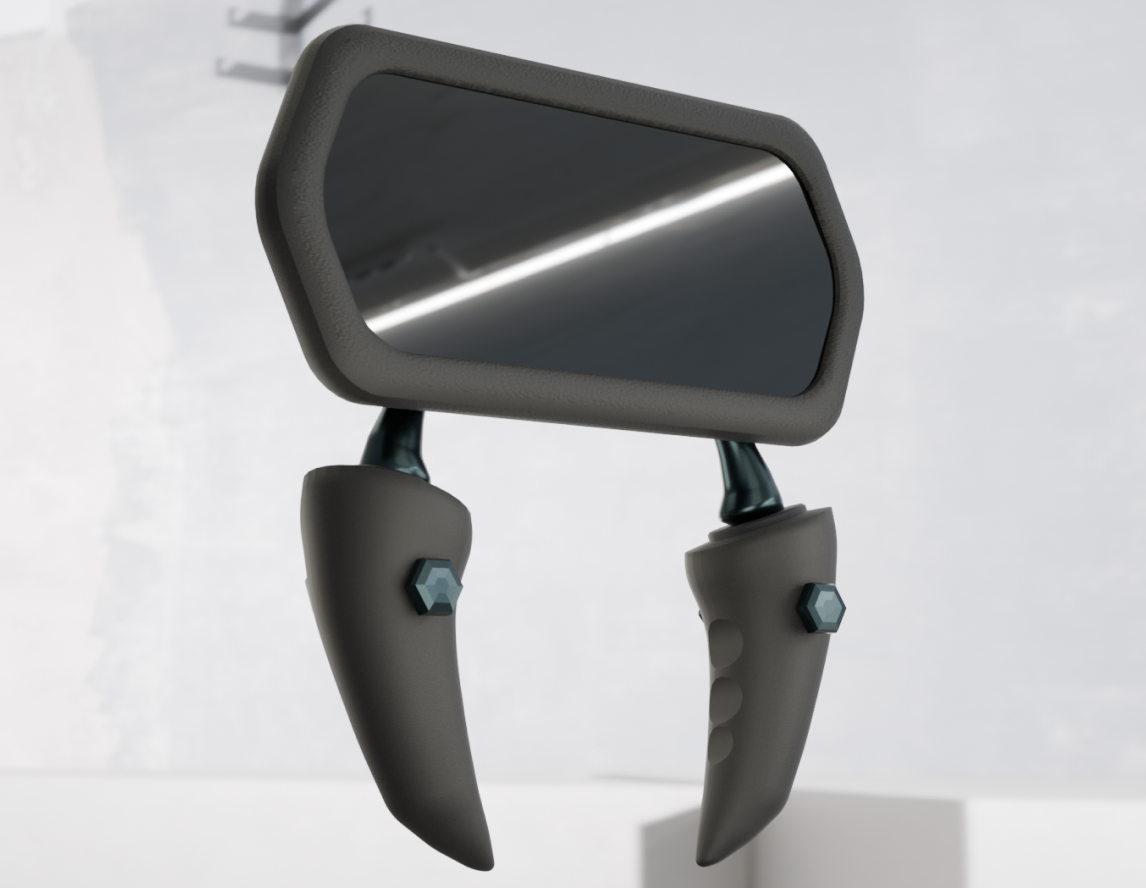
Im Designprototyp kombinierten wir Funktionalität mit einer definierten Material- und Farbgestaltung. Wir verwendeten eine Kombination aus mattem und glänzendem Kunststoff sowie Metallteilen, um eine angenehme Haptik und hochwertige Optik zu schaffen. Unsere Farbpalette bestand aus abgestuften Blau- und Grautönen, die dem Controller einen modernen, technischen Charakter verleihen und gleichzeitig eine ruhige, klare Bedienumgebung unterstützen.
view_grippr_dokumentation.pdf
Lea Hiller, Damla Gedikli, Brian Kosztovits
BetreuungProf. Michael Schuster, Anna Raveling
Tags