Interface Design 1
RoboRide

Kurzbeschreibung:
Im Rahmen des Kurses Interface Design haben wir ein neuartiges Steuerkonzept für einen Roboter mit Omni-Wheels und Greifarm entwickelt.

Der Nutzer steuert den Roboter über einen speziell konzipierten Sitz – den sogenannten RoboRide – der verschiedene Eingabemöglichkeiten direkt integriert.
Ziel & Motivation:
Ziel des Projekts war es, eine immersive Steuerung für komplexe Roboterbewegungen zu schaffen. Statt klassischer Gamepads oder Tastaturen wollten wir eine physische Steuerzentrale entwickeln, die sowohl intuitiv als auch funktional ist und dem Nutzer eine direkte Verbindung zum Roboter vermittelt.
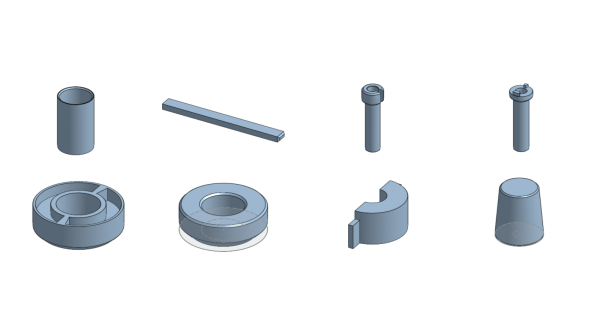
Technische Umsetzung:
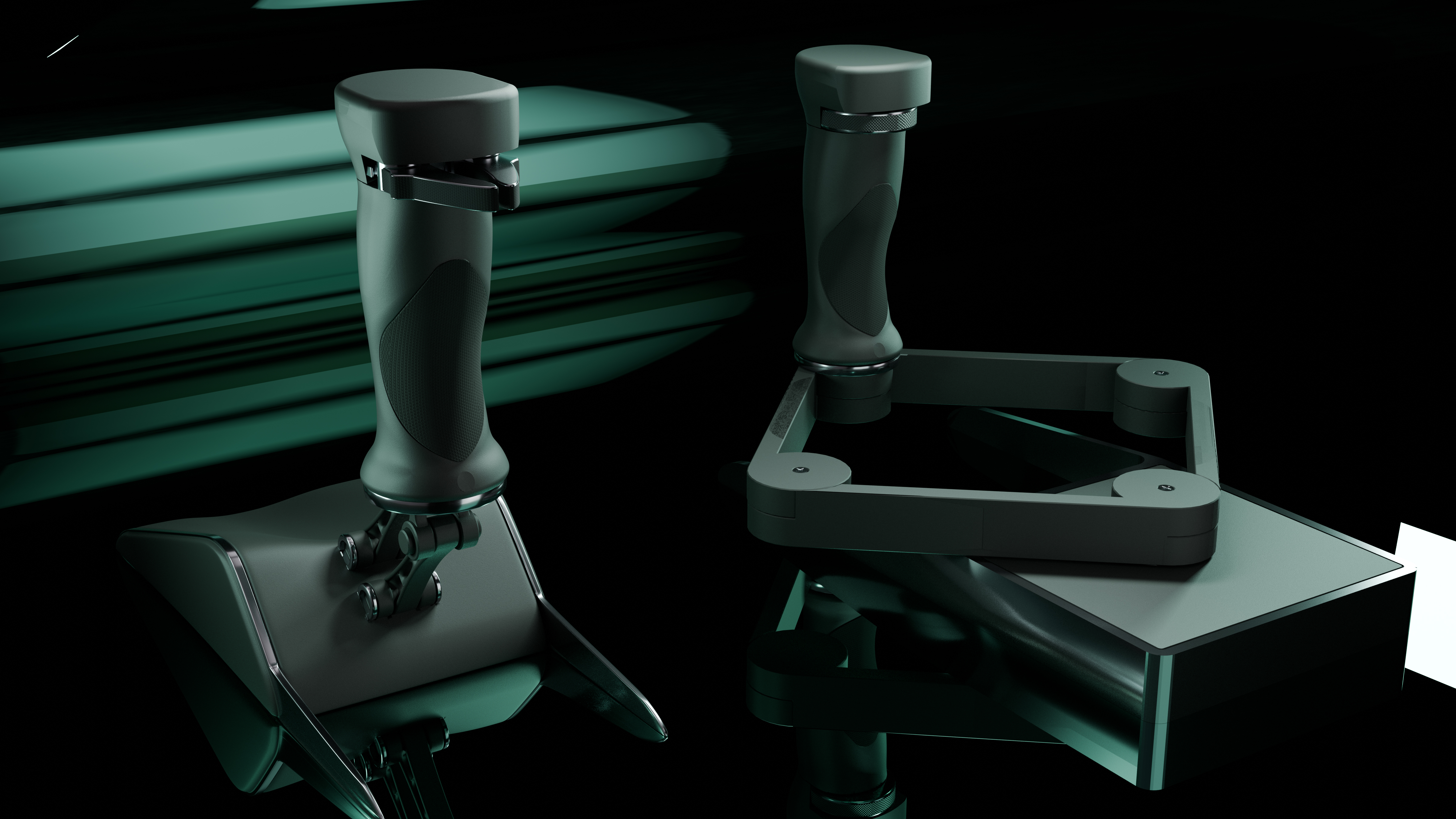
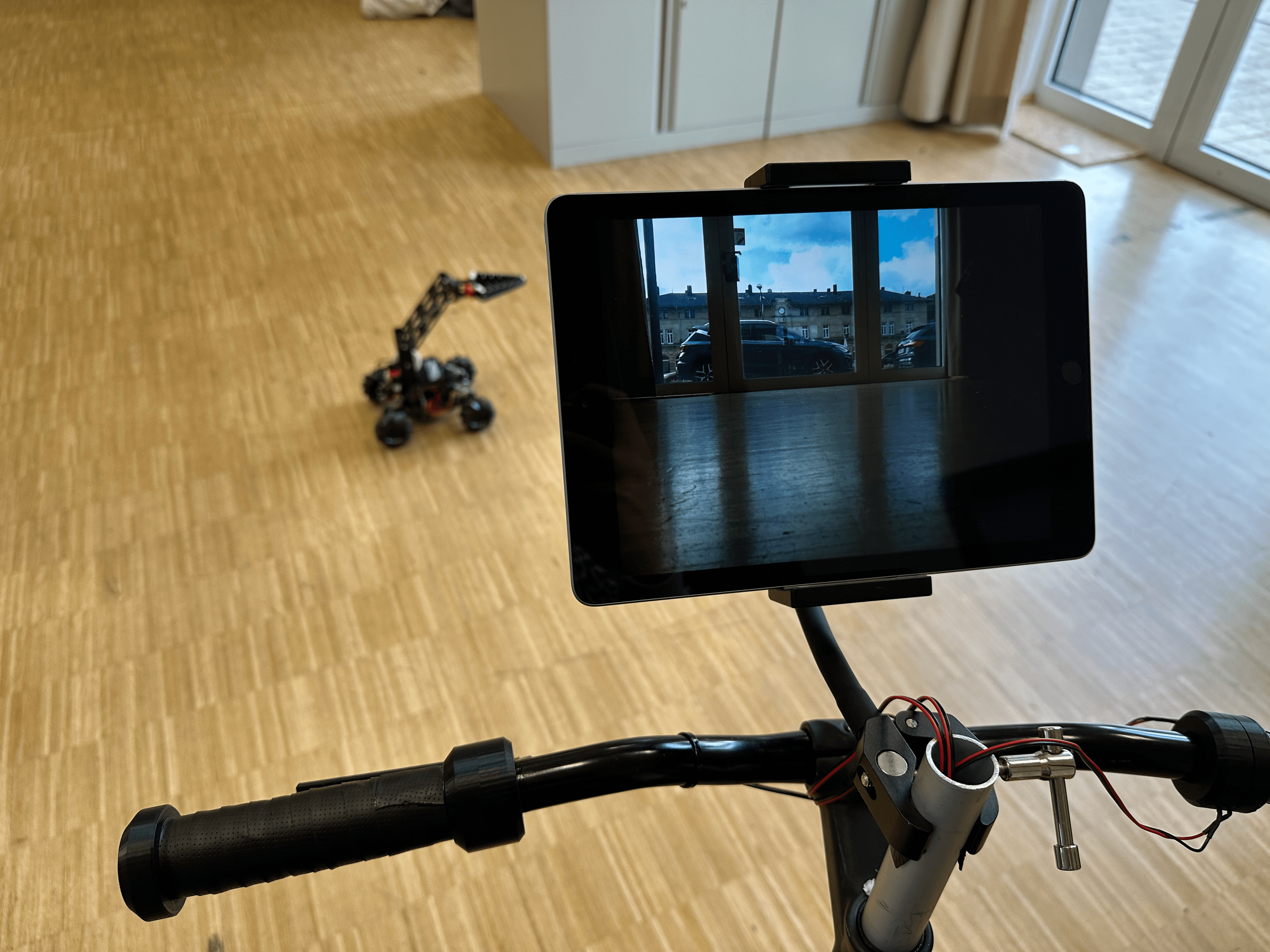
Der Nutzer sitzt „falsch herum“ auf dem Stuhl – die frühere Rückenlehne wurde zum Lenker umgebaut. Dieser Lenker ist über den originalen Lehnen-Mechanismus neigbar. Ein darunter befestigtes Schiebepotentiometer misst den Neigungswinkel und steuert damit die Geschwindigkeit des Roboters.

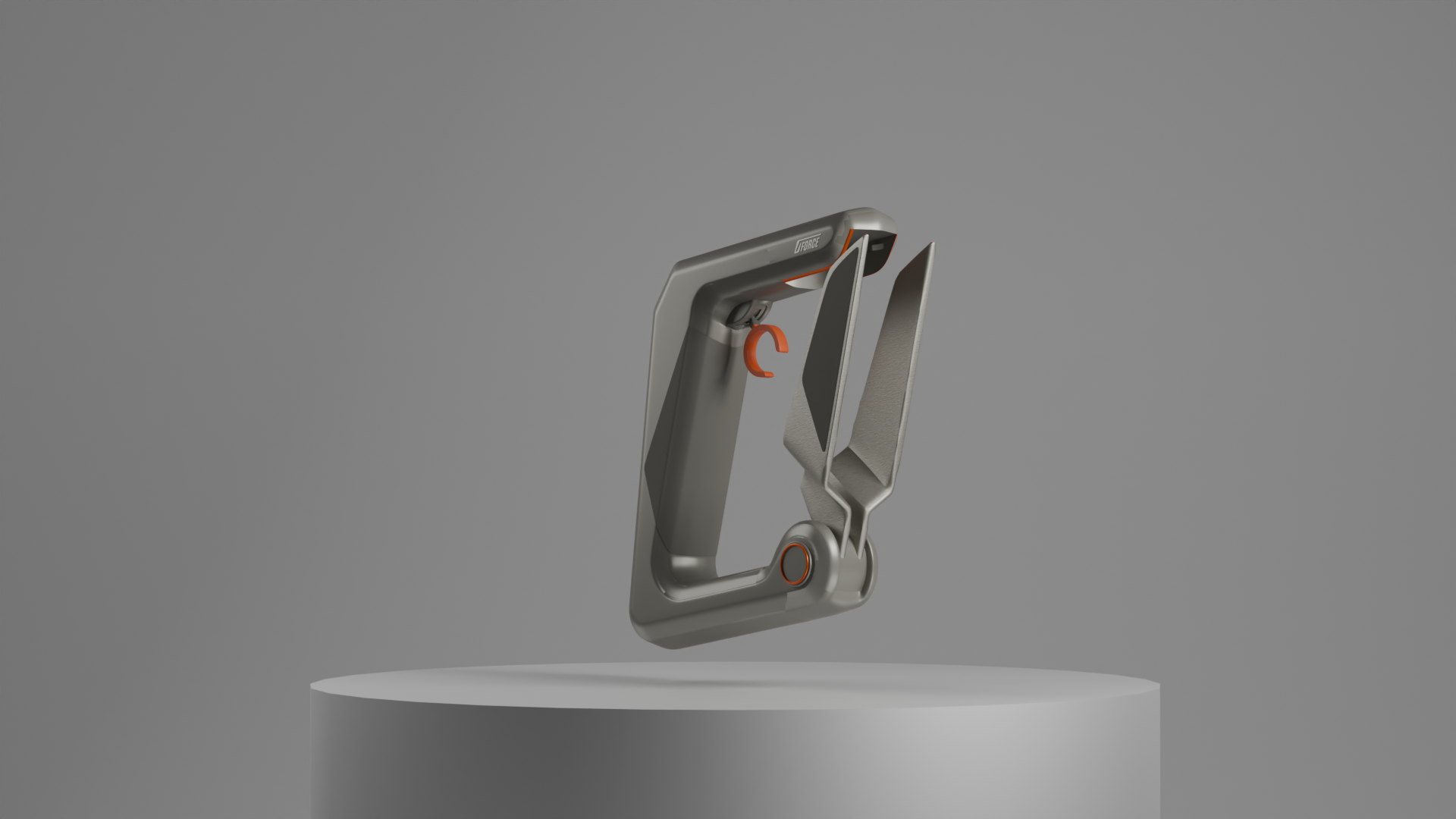
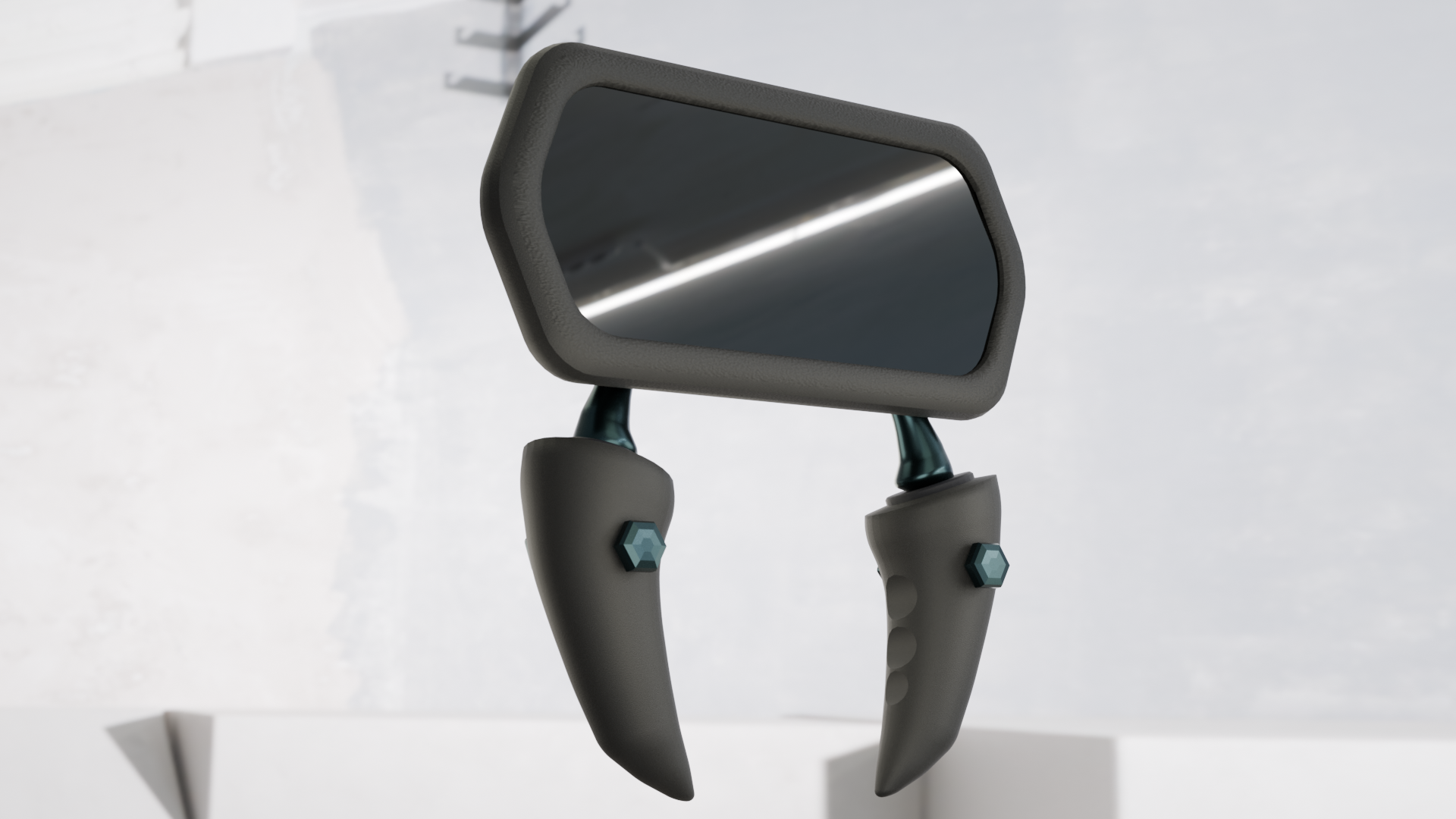
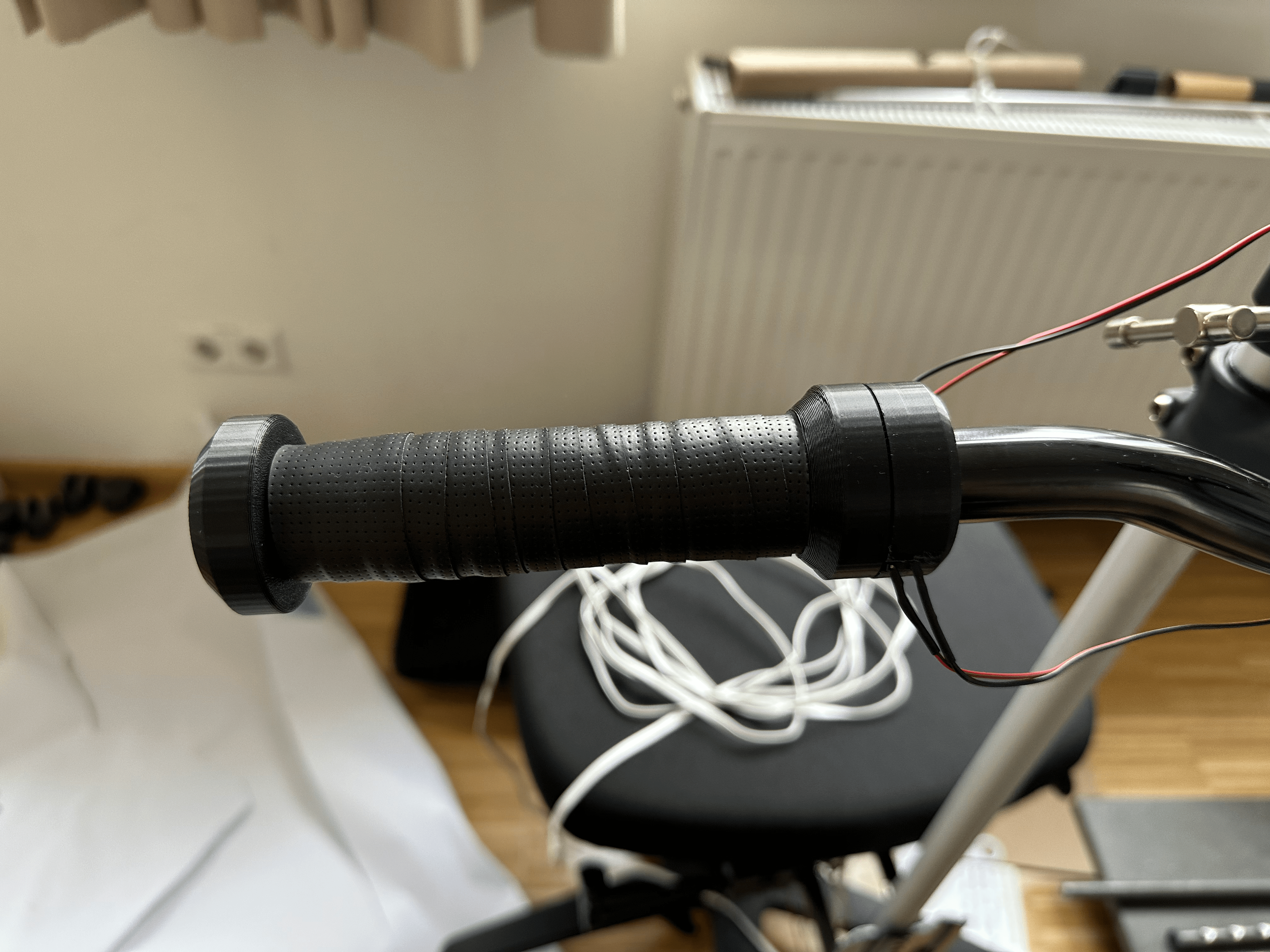
Der Roboterarm wird über einen drehbaren Griff wie beim Motorradgas reguliert – durch das Drehen bewegt sich der Greifarm nach oben oder unten. Federn im Griff sorgen dafür, dass dieser automatisch in die Nullstellung zurückkehrt.
Auf der linken Seite des Lenkers befindet sich ein zweiter Griff mit einer Bremshebel-Mechanik. Zieht man den Hebel, öffnet sich der Greifer des Roboterarms.

Für die Lenkung synchronisieren wir zwei digitale Kompasse: einer im Roboter, einer unter dem Stuhl. Dreht der Nutzer den Stuhl um die eigene Achse, rotiert der Roboter synchron mit. In Kombination mit dem Vorwärtsimpuls über das Potentiometer können so auch Kurven gefahren werden.
Zur Orientierung befindet sich ein Tablet direkt am Stuhl, das die Live-POV der Kamera auf dem Roboter überträgt. So behält der Nutzer auch ohne Sichtkontakt die Umgebung des Roboters im Blick.
Fazit & Ausblick:
Unser Steuerstuhl bietet eine intuitive und körpernahe Steuerung des Roboters. Die Kombination aus mechanischen und digitalen Sensoren schafft ein immersives Steuerungserlebnis. Zukünftig ließe sich das System noch um Feedback-Mechaniken oder Assistenzsysteme erweitern, um die Präzision der Steuerung weiter zu verbessern.
Video:
Nils Jaeger, Florentin Barth, Yannick Ruoff
BetreuungProf. Michael Schuster, Anna Raveling
Tags