Interface Design 1
MOOV - Designed for intuition
Ideenfindung
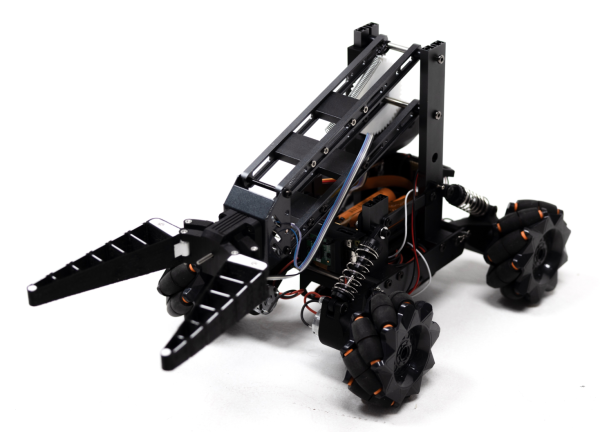
Am Anfang stand die Frage, wie sich ein Roboter mit Greifarm intuitiv und funktional steuern lässt. Unser Ziel war es, einen innovativen und zugleich minimalistischen Controller zu entwickeln, der nicht auf physisches Feedback und eine natürliche Bedienung verzichtet.
Die entscheidende Umsetzung gelang uns mit der Übertragung der Bewegungen des Roboters, die wir direkt mit unseren Controllern nachahmten. Indem wir dieses Konzept auf die Controller übertrugen, schufen wir eine direkte, haptisch erfahrbare Verbindung zwischen Nutzer und Roboter.
Funktionen

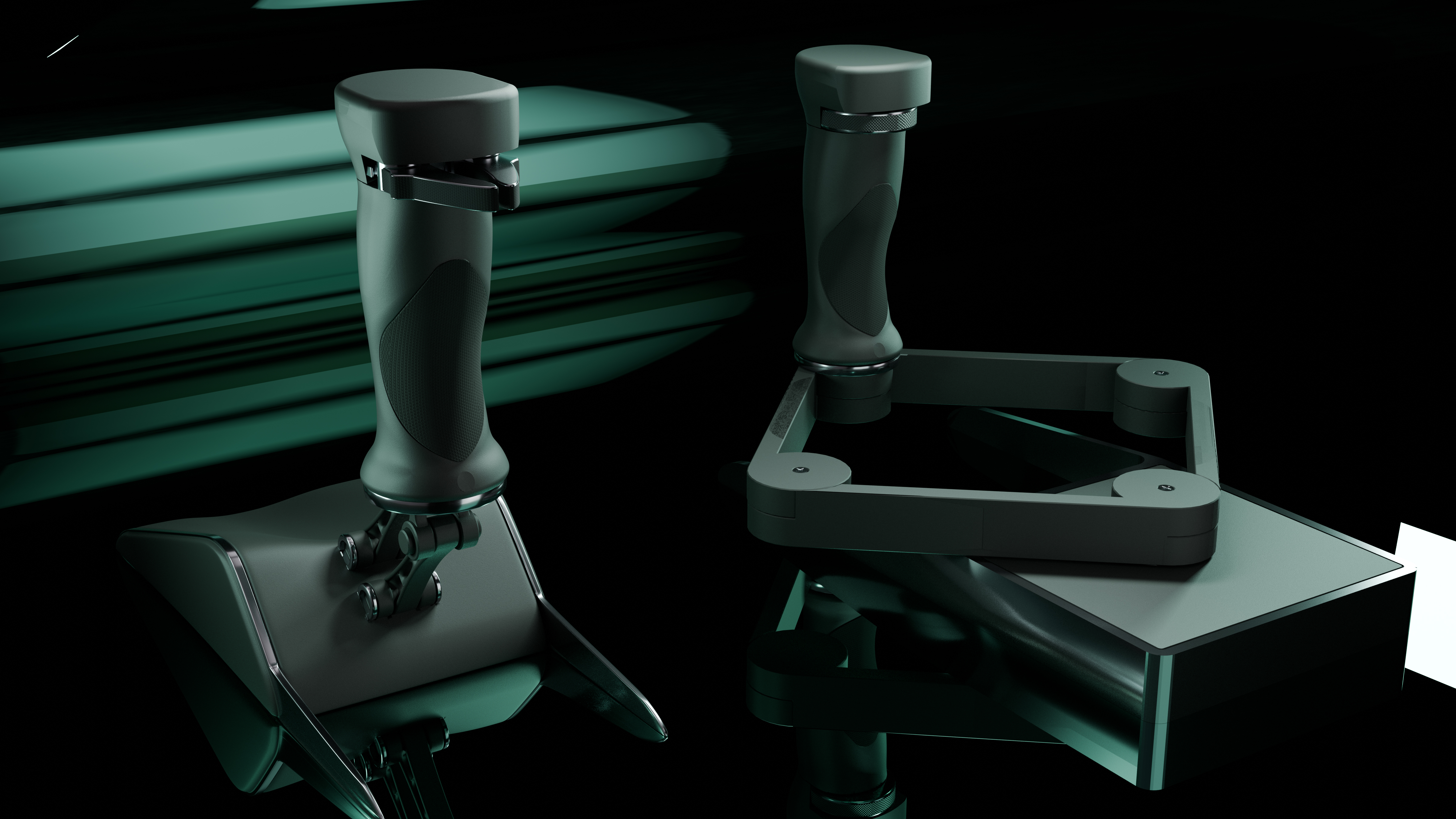
Der Controller ist in zwei Einheiten unterteilt: eine für die Fortbewegung des Roboters, eine für die Steuerung des Greifarms. Diese Trennung ermöglicht eine präzise Kontrolle über beide Systeme.
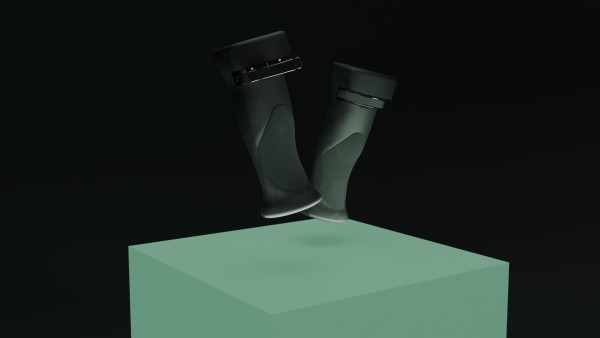
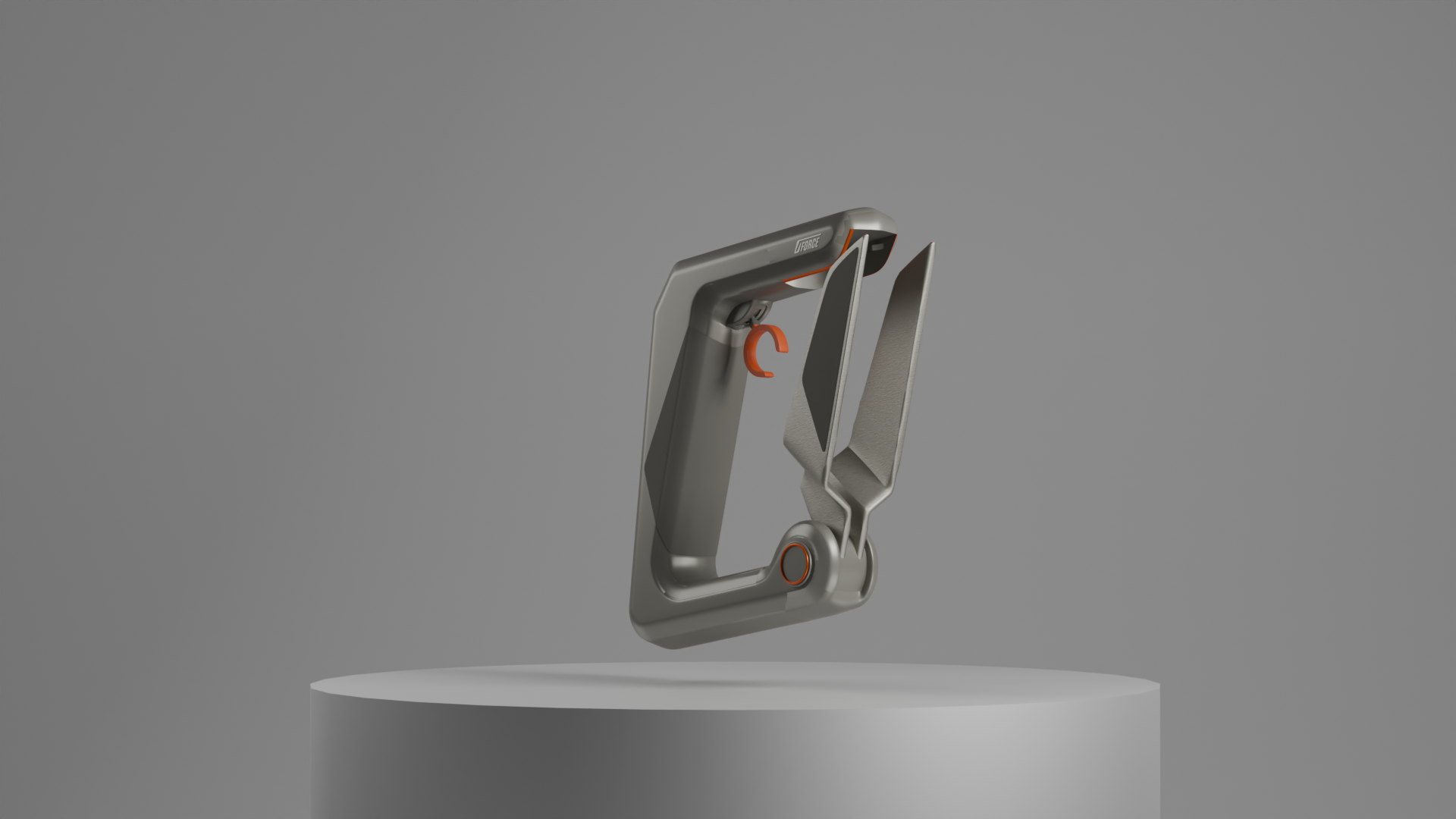
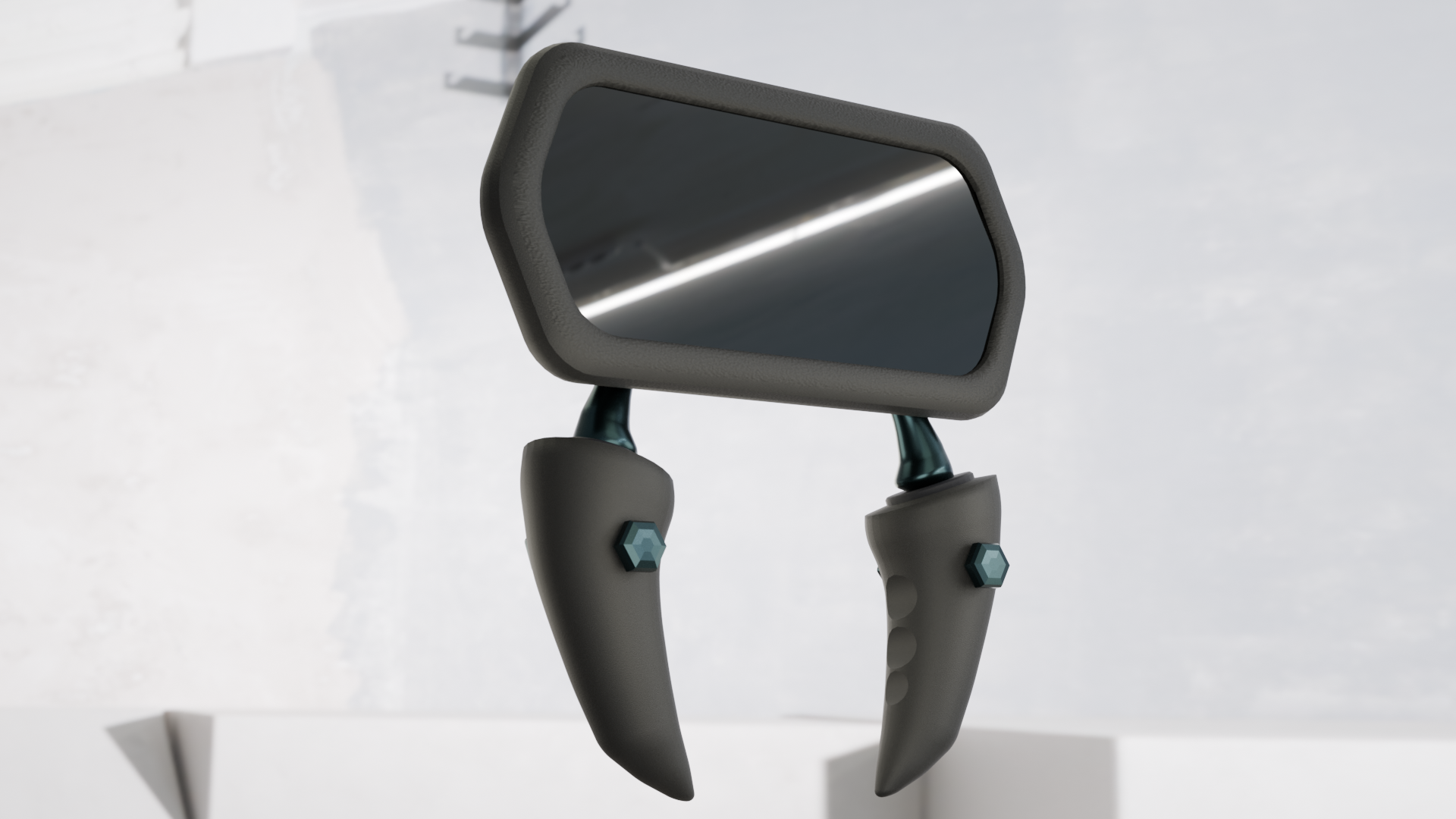
Die Steuerung des Greifarms erfolgt durch Senken und Heben eines ergonomischen Griffs. Das Schließen des Greifers wird durch das Zusammendrücken zweier Elemente am oberen Ende ausgelöst. Beim Loslassen öffnet er sich automatisch.
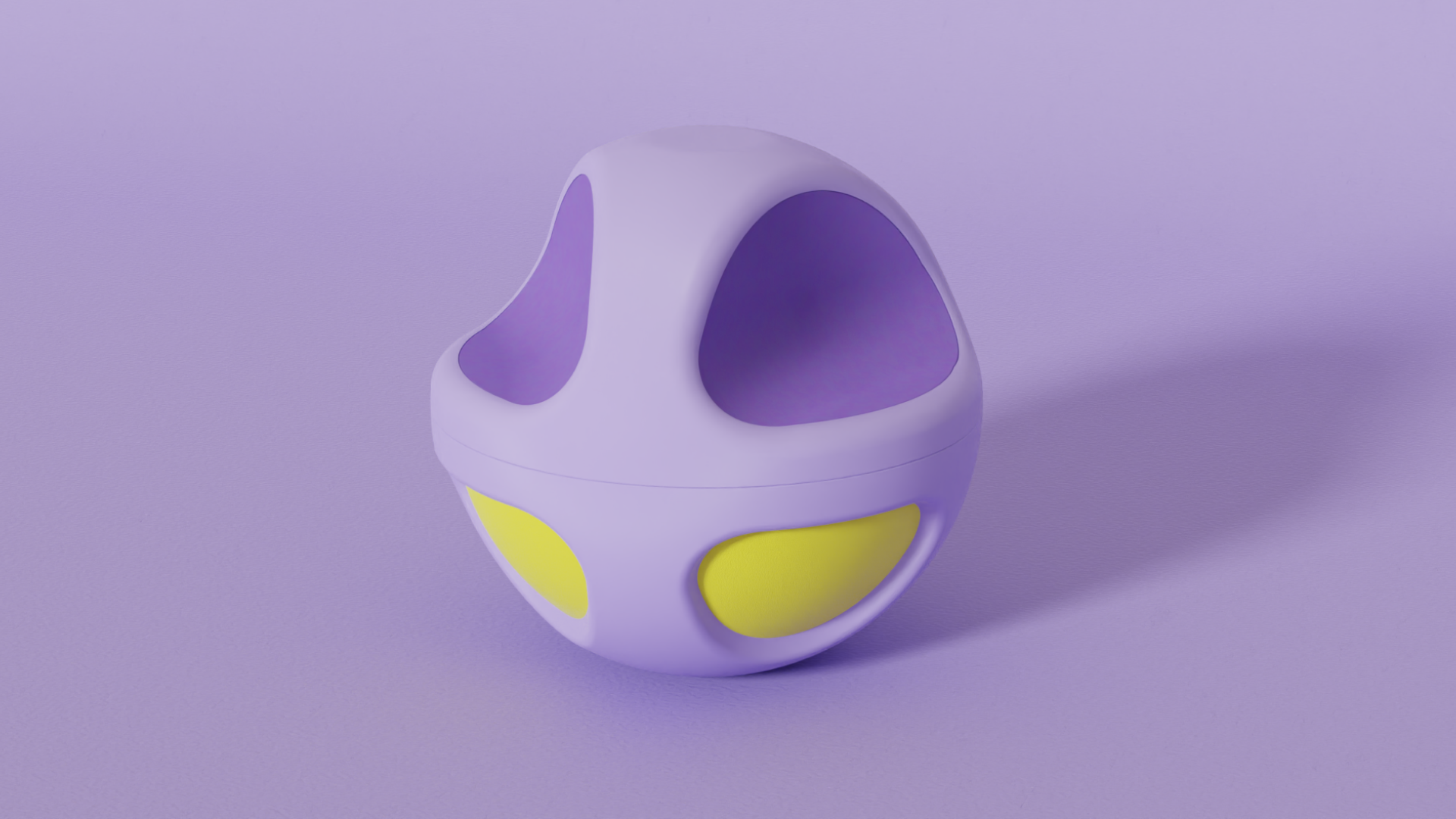
Die Fortbewegung des Roboters wird durch einen zweiten Controller übernommen, der sich in alle Richtungen schieben lässt. Ein zusätzlicher Drehregler erlaubt das Rotieren auf der Stelle.
Insgesamt entsteht eine Steuerung, die klare Bewegungen direkt überträgt und sich an natürlichen Gesten orientiert – ohne lange Eingewöhnung.
Frühere Prototypen
In der anfänglichen Konzeptphase experimentierten wir mit einer Führungsschiene für den Unterarm, über die sich die Auf- und Abbewegung des Roboterarms steuern ließ. Die Idee: Der eigene Arm sollte sich synchron zum Roboter bewegen. Parallel dazu entstand ein erster Fahr-Controller in Mausform, angelegt wie ein Joystick.
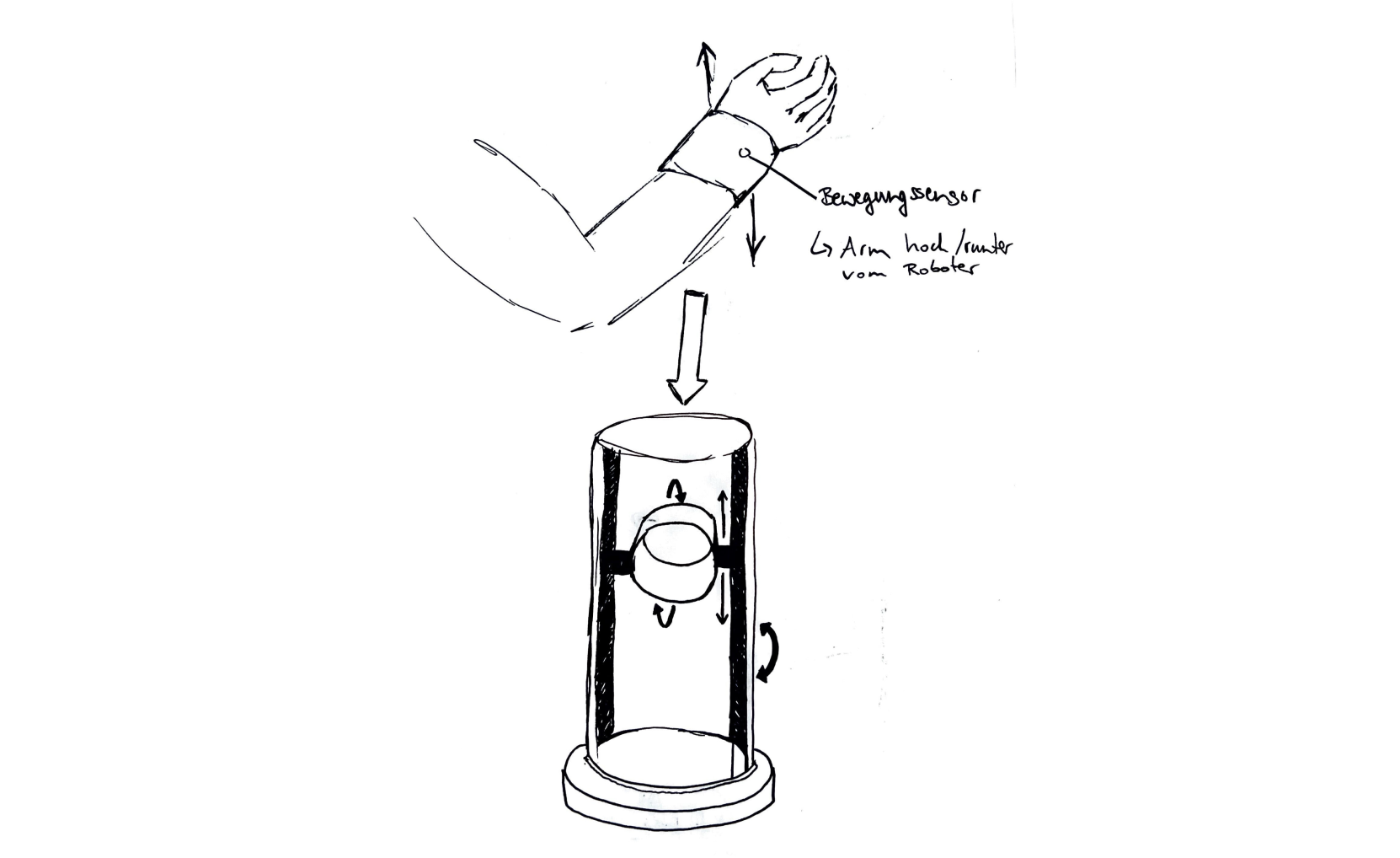
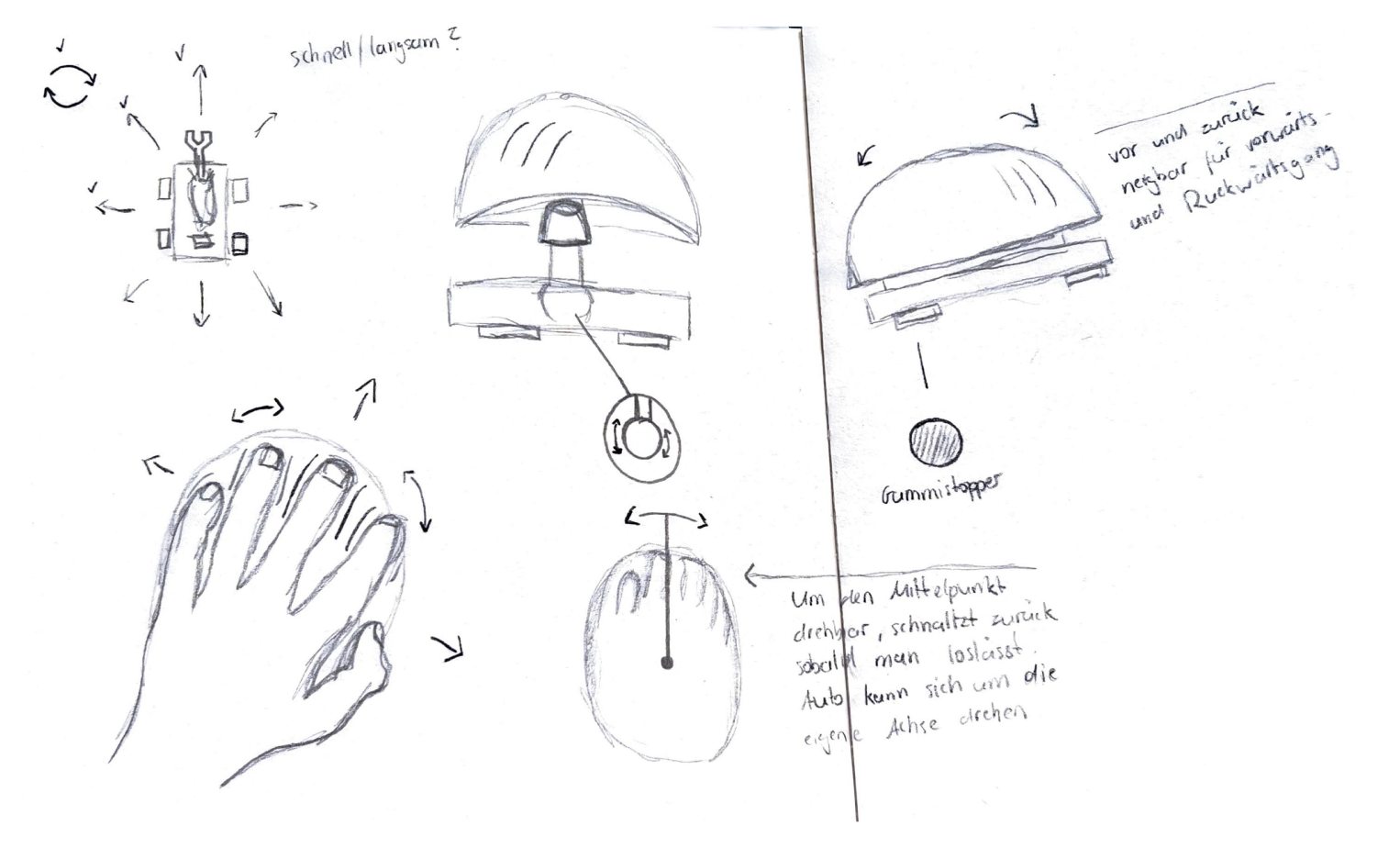
Die Schiene am Unterarm schränkte natürliche Bewegungen jedoch zu sehr ein und in der Praxis würde das diagonale Lenken und gleichzeitige Rotieren des Joysticks zu unpräzisen, teils ungewollten Bewegungsabläufen des Roboters führen. Dementsprechend verwarfen wir beide Ideen.
Wir entwickelten einen neuen Controller mit einem frei geführten Griff auf einer Stange, der die Armbewegungen präzise überträgt. Anregungen eines innovativen Produkts mit dem Namen Scribble brachten zusätzliche Impulse und Elemente aus dessen Aufbau flossen in die weitere Ausarbeitung unseres Systems ein.
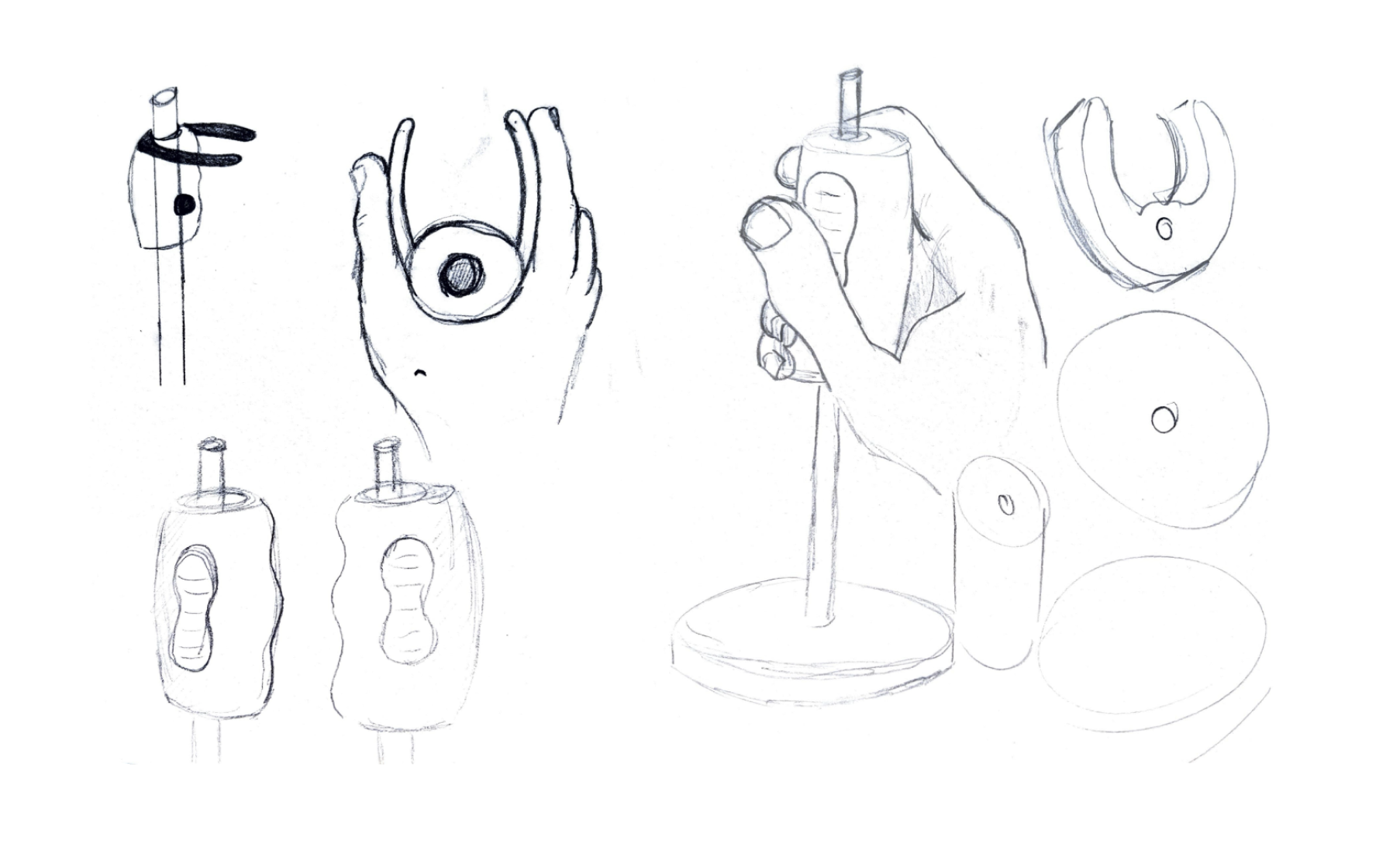

Um die Bewegung des Controller noch mehr mit der des Roboters abzugleichen, verwendeten wir statt der ursprünglichen Stange ein gelenkgeführtes Hebelsystem, das die vertikale Bewegung des Arms mechanisch unterstützt. Am oberen Ende war ein ergonomisch geformter Griff angebracht, der sich leicht nach vorne und unten senken ließ.
Zusätzlich integrierten wir die Mechanik des Robotergreifers direkt in den Griff, um auch das Schließen möglichst intuitiv umzusetzen.
Funktionsprototyp
Mit diesem Konzept entwickelten wir einen Prototypen. Die Bauteile wurden mithilfe eines 3D-Druckers und eines Lasercutters aus Holz und Plastik realisiert. So konnten wir schnell eine testfähige Version des Controllers umsetzen.

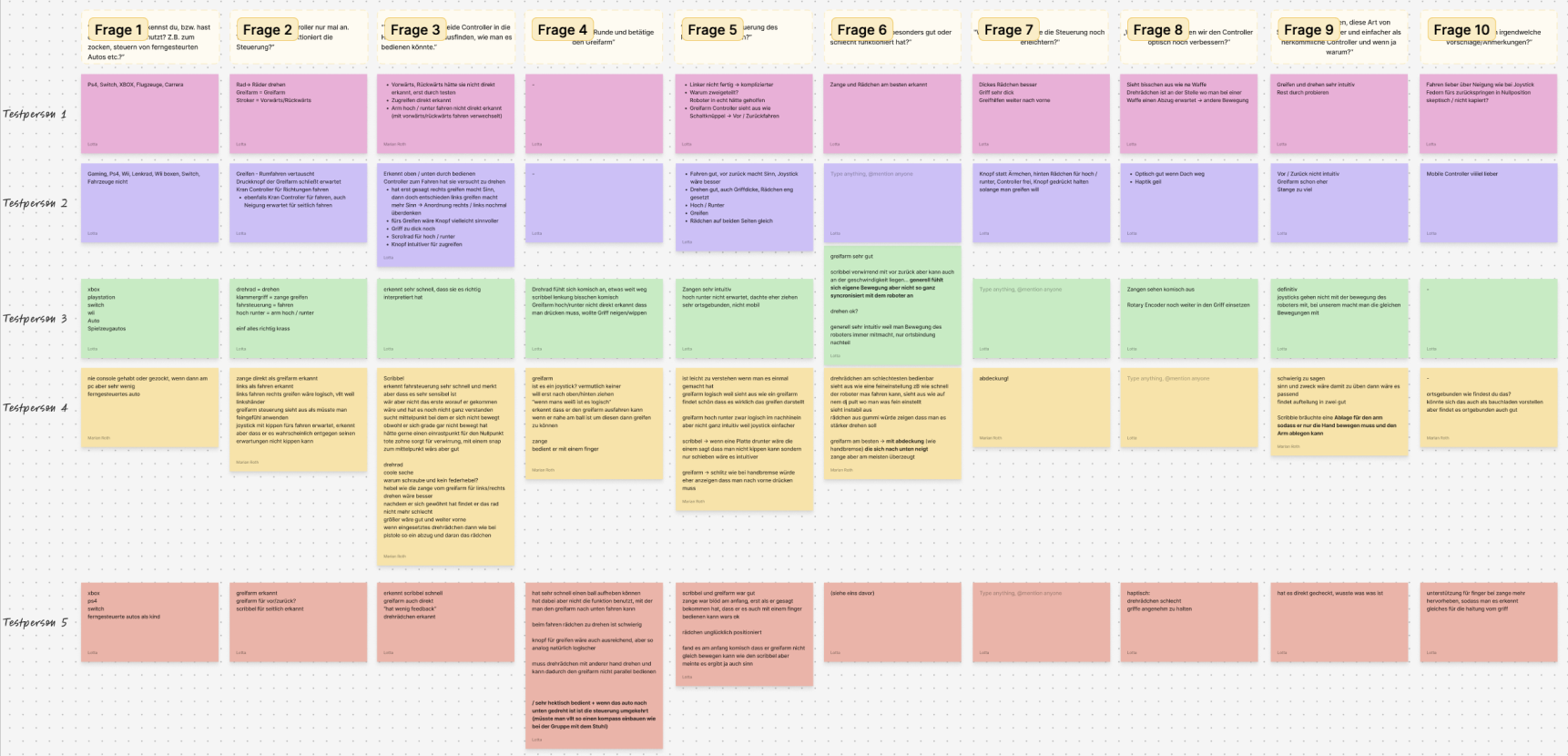
Usability Test
In ersten Usability-Tests testeten Nutzer ohne Vorerfahrung alle Funktionen und gaben Feedback zur Steuerung, Haptik und Verständlichkeit. Es zeigte sich, dass einige Abläufe unklar waren und die Form noch nicht selbsterklärend wirkte.
Optimierung
Im Anschluss an die erste Ausführung wurden beide Controller gezielt überarbeitet.
Der Greifarm-Controller erhielt eine zusätzliche Federmechanik, durch die sich der Griff leicht nach vorne neigt. Dadurch wird bereits im Ruhezustand ein Bewegungsimpuls angedeutet und die Nutzer erkennen intuitiv, dass der Controller sich nach vorne und zurück bewegen lässt.
Beim „Scribble“-Controller ergänzten wir einen sogenannten Nullpunkt, eine zentrale Rückstellposition, in der der Roboter stillsteht. Der Controller wird durch einen leichten Zug mechanisch in diese Mittelstellung zurückgeführt. Dieses haptische Feedback hilft dabei, die Steuerung präzise zu zentrieren und Bewegungspausen klar zu definieren.
Designprototyp
Für den Designprototyp entschieden wir uns für eine reduzierte, funktionale Gestaltung, die durch ihre Materialwahl unterstützt wird. Der Korpus besteht aus mattem Kunststoff, ergänzt durch einzelne Metallakzente, die Stabilität und visuelle Klarheit schaffen. Griffbereiche sind mit Elementen mit einer strukturierten Gummierung versehen, die für sicheren Halt sorgen und das haptische Feedback verbessern. Farblich bleibt der Controller bewusst neutral: Dunkle Grautöne und Schwarz dominieren das Erscheinungsbild und unterstreichen den technischen, konzentrierten Charakter des Bedienkonzepts.

Lotta Hackius, Lennox Luley, Marian Roth
BetreuungProf. Michael Schuster, Anna Raveling
Tags