Interface Design 1
DRYVE


Aufgabenstellung
Im Rahmen des Kurses bestand die Aufgabe darin, einen Controller für die Steuerung eines Roboters zu entwerfen. Ziel war es, bewusst von klassischen Gestaltungs- und Interaktionskonzepten abzuweichen und neue, experimentelle Wege der Steuerung zu erkunden. Dabei gab es keine festgelegte Nutzergruppe – dieser Freiraum ermöglichte es, eigene Annahmen zu treffen und ein Gestaltungskonzept frei zu entwickeln. Der Fokus lag darauf, Interaktion neu zu denken und funktionale sowie gestalterische Grenzen typischer Controller zu hinterfragen.


Produkt
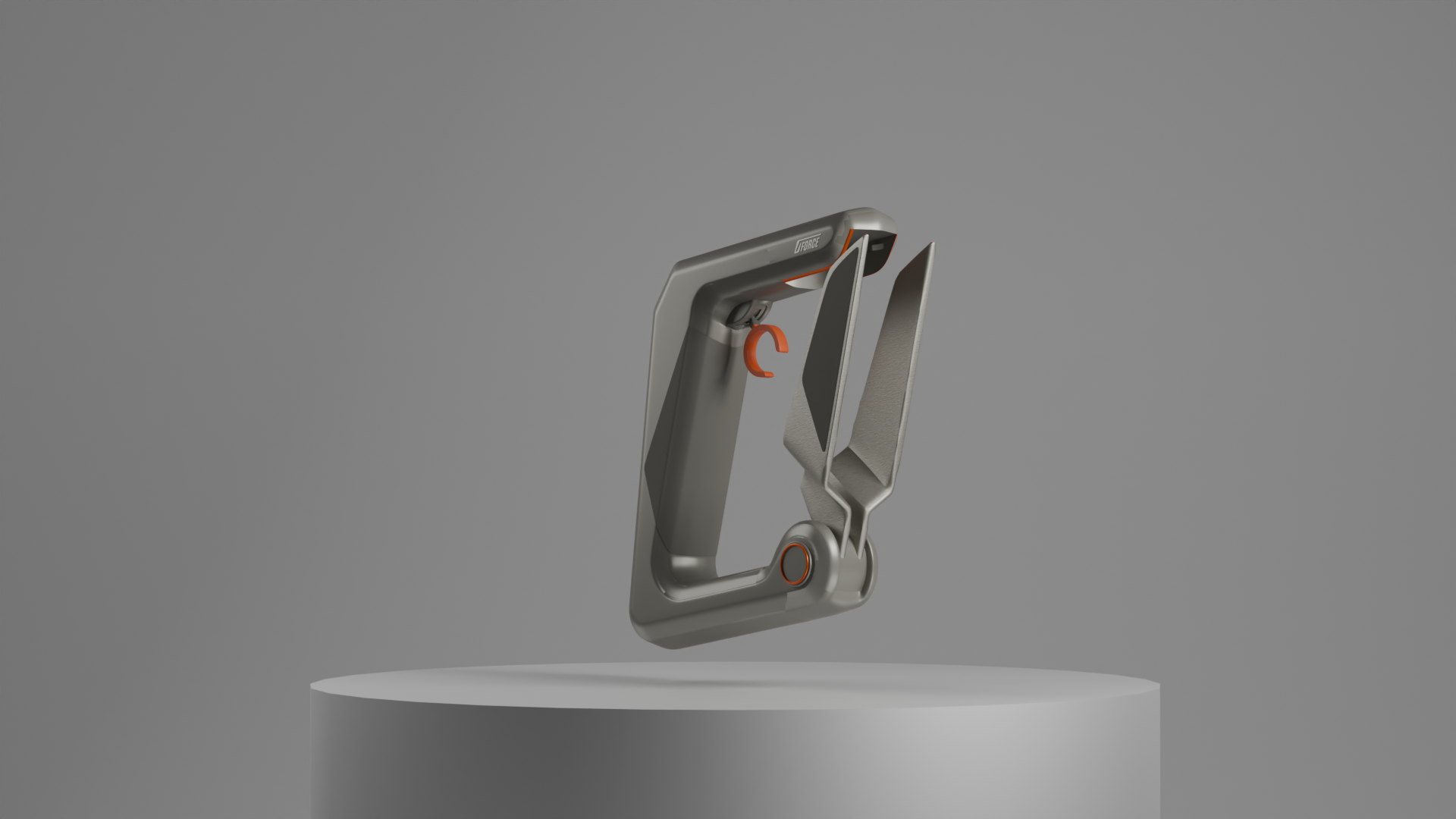
Bei der Entwicklung unseres Controllers haben wir großen Wert darauf gelegt, ein einhändig bedienbares Gerät zu gestalten, das sowohl für Links- als auch für Rechtshänder gleichermaßen nutzbar ist. Der Controller sollte intuitiv und einfach zu bedienen sein, gleichzeitig aber auch in Bezug auf Ästhetik und Ergonomie überzeugen.
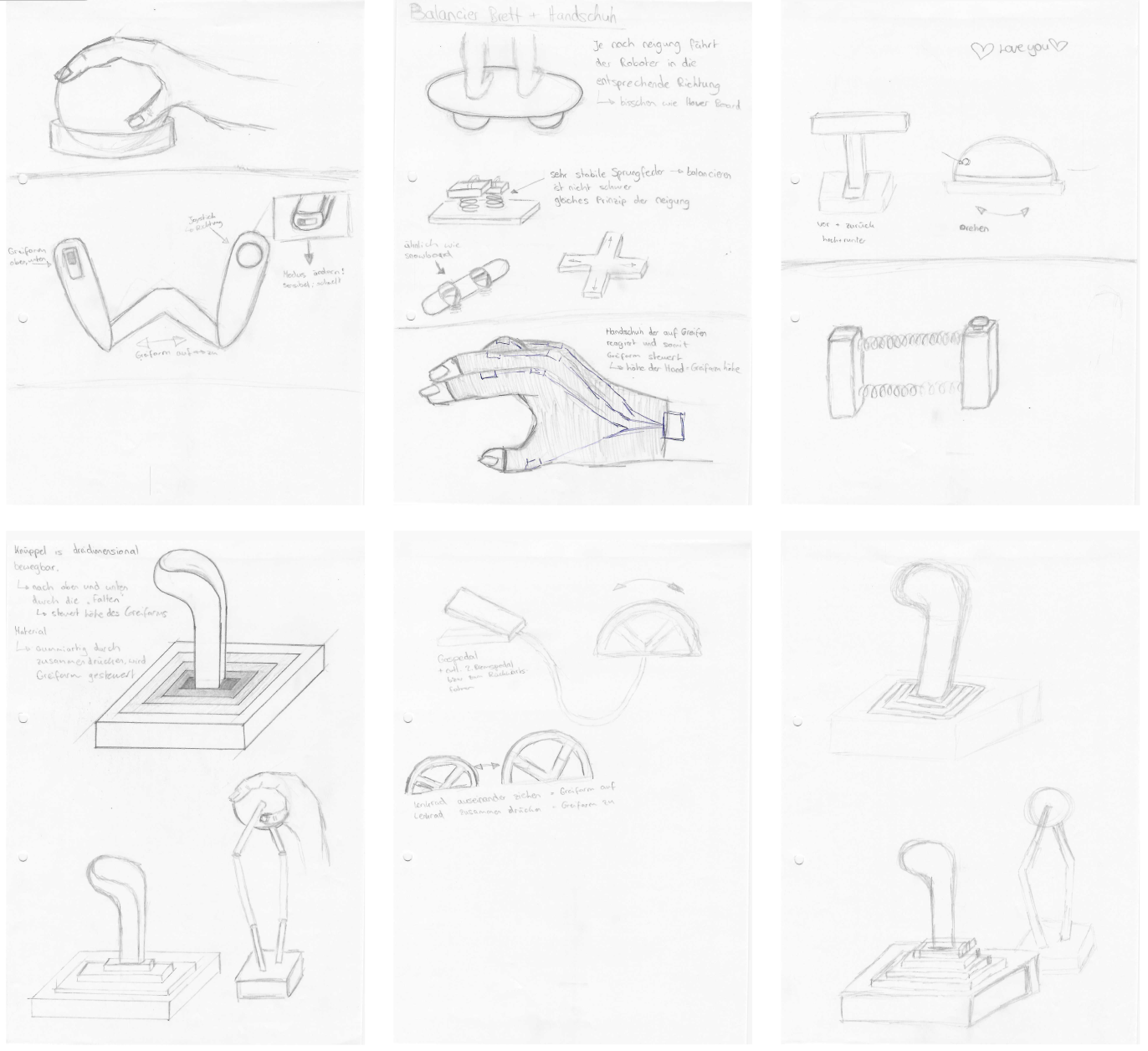
Erste Ideen
Zu Beginn des Projekts haben wir in der Gruppe individuelle Ideen und Inspirationen gesammelt. Anschließend wurden diese gemeinsam vorgestellt, diskutiert und weiterentwickelt. Dieser offene Austausch half uns, verschiedene Herangehensweisen zu vergleichen, erste Gestaltungsansätze zu entwickeln und ein gemeinsames Verständnis für mögliche Richtungen zu finden.
Prototype
Funktionsprototype
Während der Entwicklungsphase unseres Controllers wurde uns schnell klar, dass die Gestaltung eines funktionalen Einhand-Controllers eine größere Herausforderung darstellte als zunächst gedacht. Die größte Schwierigkeit bestand darin, alle Funktionen des Roboters trotz des begrenzten Platzes in einem kompakten, einhändig bedienbaren Steuerungskonzept unterzubringen.
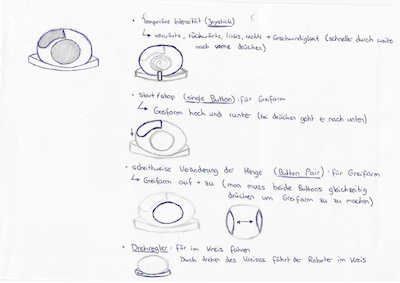
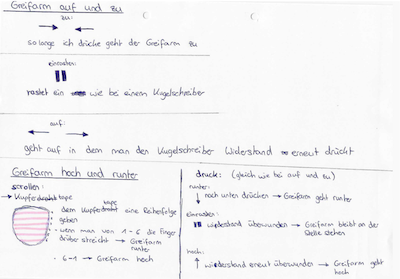
Ziel war eine klare und benutzerfreundliche Zuordnung aller Funktionen zu den Bedienelementen. Dabei stand im Fokus, jede Funktion sinnvoll und ergonomisch steuerbar zu machen.
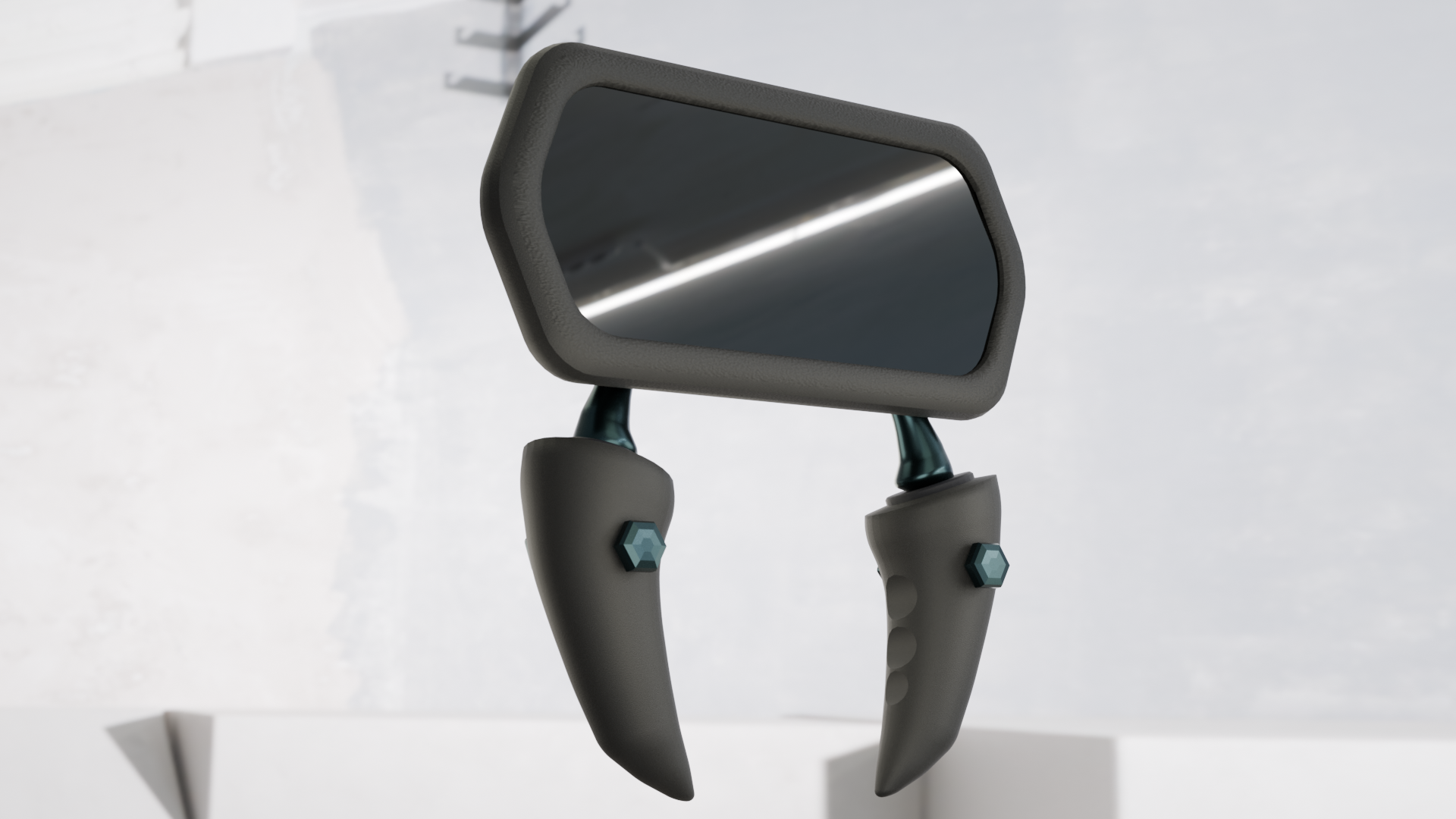
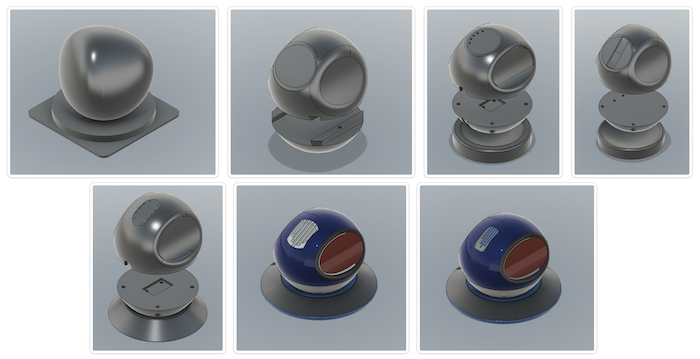
Design Prototyp
Nachdem wir durch mehrere Handskizzen eine konkrete Vorstellung unseres Controllers entwickelt hatten, begannen wir mit der 3D-Modellierung in Blender. Dabei lag der Fokus erneut stark auf der Ergonomie.
Da wir bereits in früheren Phasen verschiedene Varianten im 3D-Druck getestet hatten, konnten wir deren Stärken und Schwächen vergleichen und daraus einen optimalen Mittelwert für die ergonomische Gestaltung unseres Controllers ableiten.
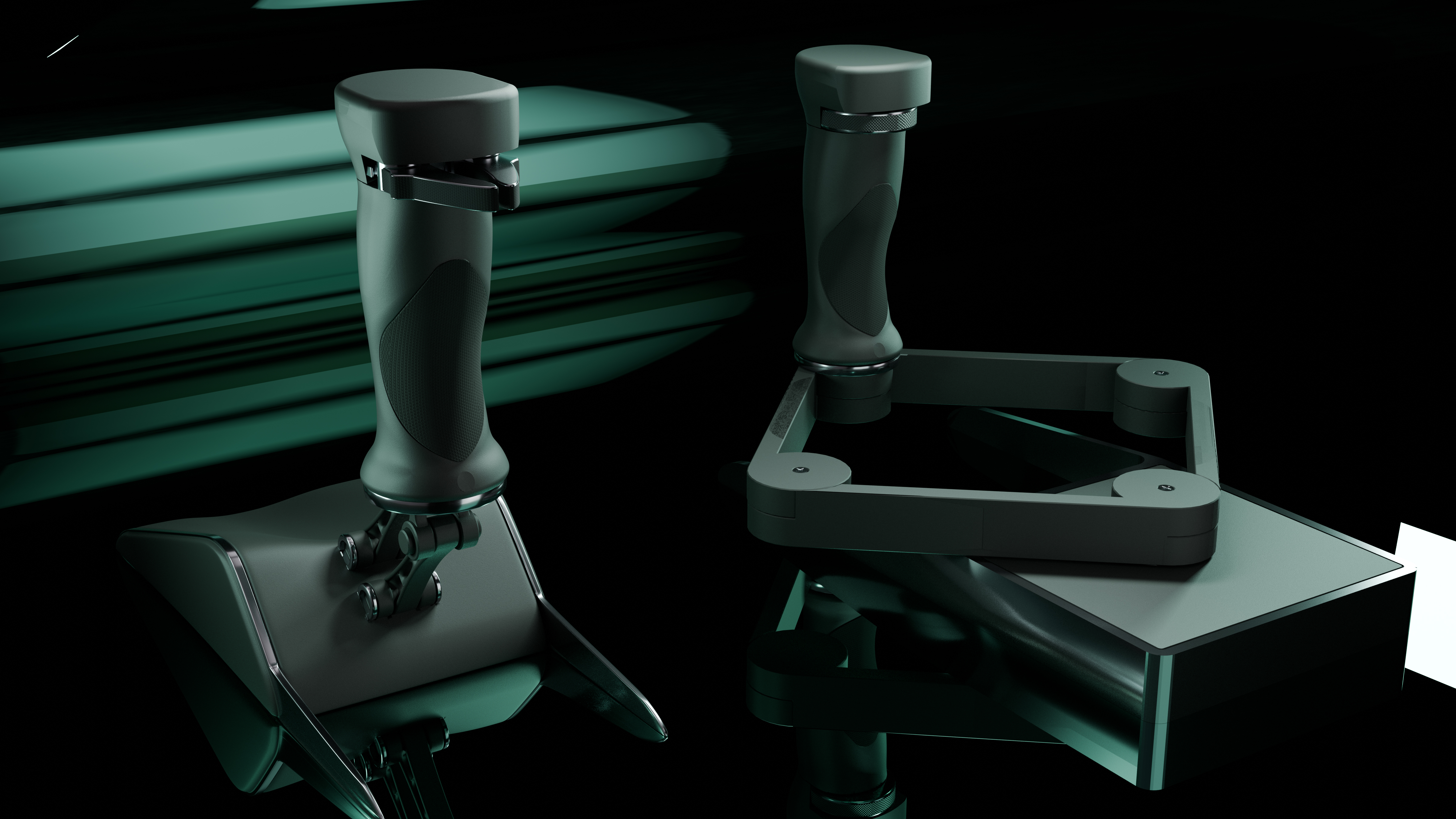
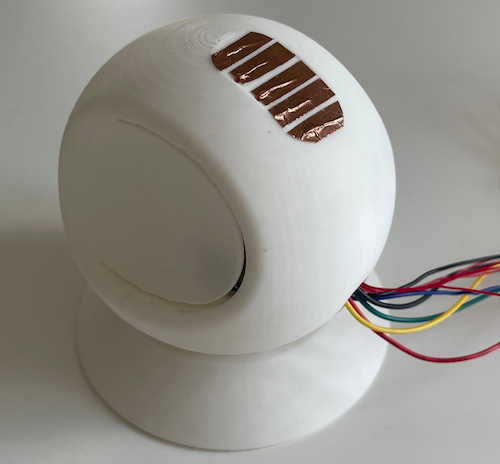
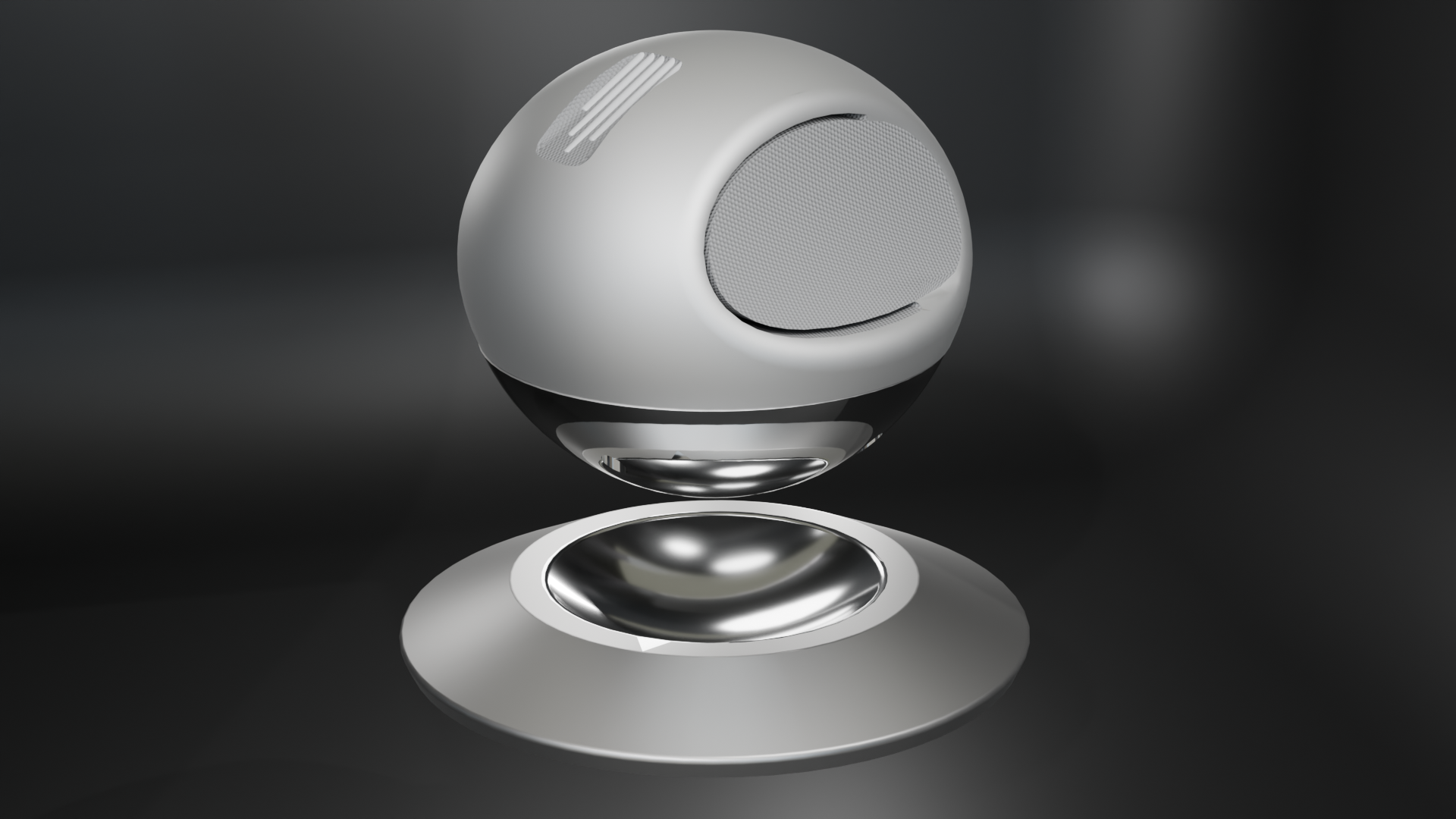
Endprodukt
Julia Tischler, Ashlee Scheller, Klara Buehr
BetreuungProf. Michael Schuster, Anna Raveling
Tags