Interface Design 1
Orb
Minimalistisch, intuitiv, haptisch – der Controller orb macht die Steuerung von Robotern greifbar und natürlich. Durch Neigen wird der Roboter gelenkt – ohne komplizierte Bedienoberflächen.
Documentation
ansehen
herunterladen
Konzept
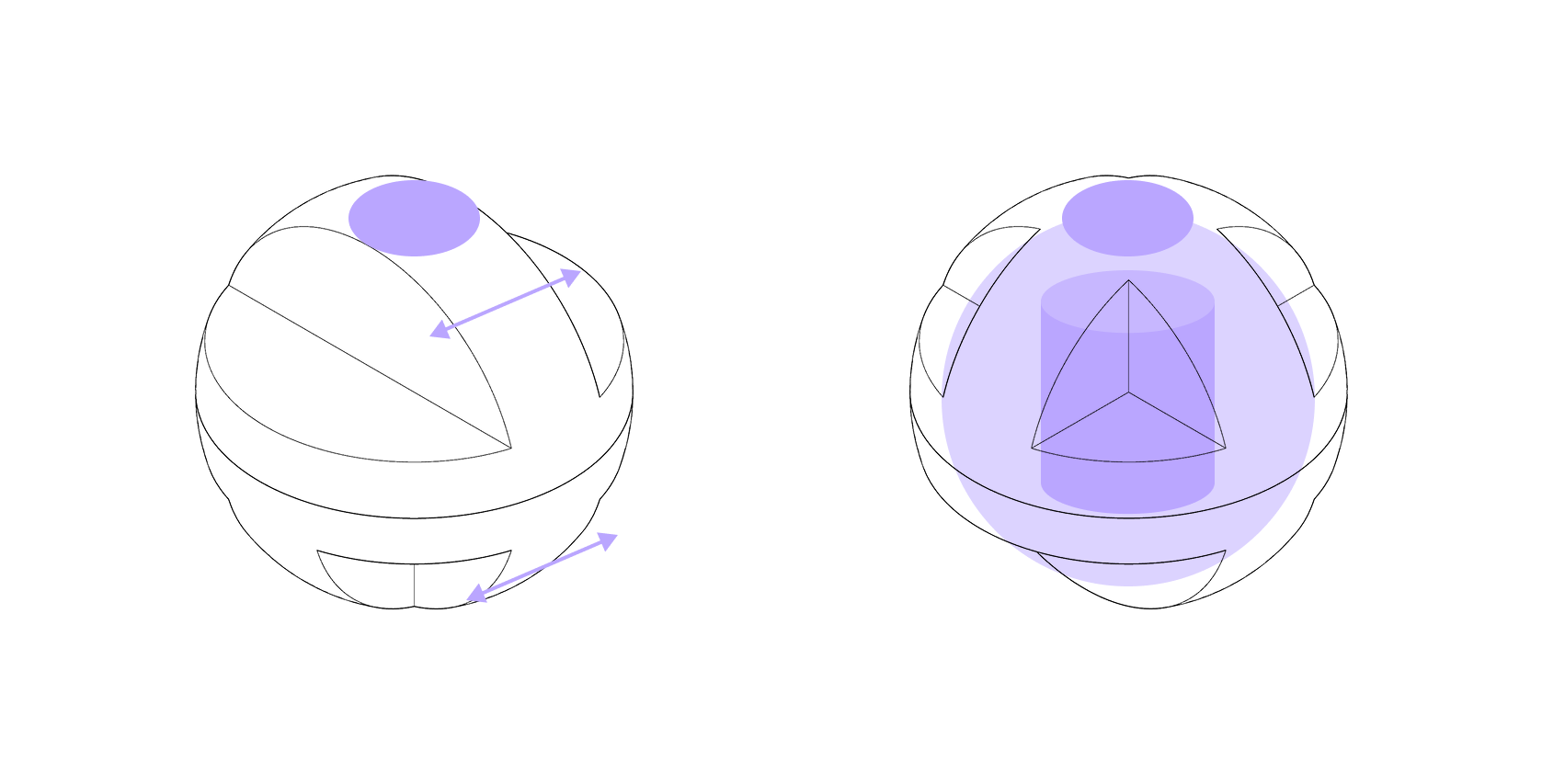
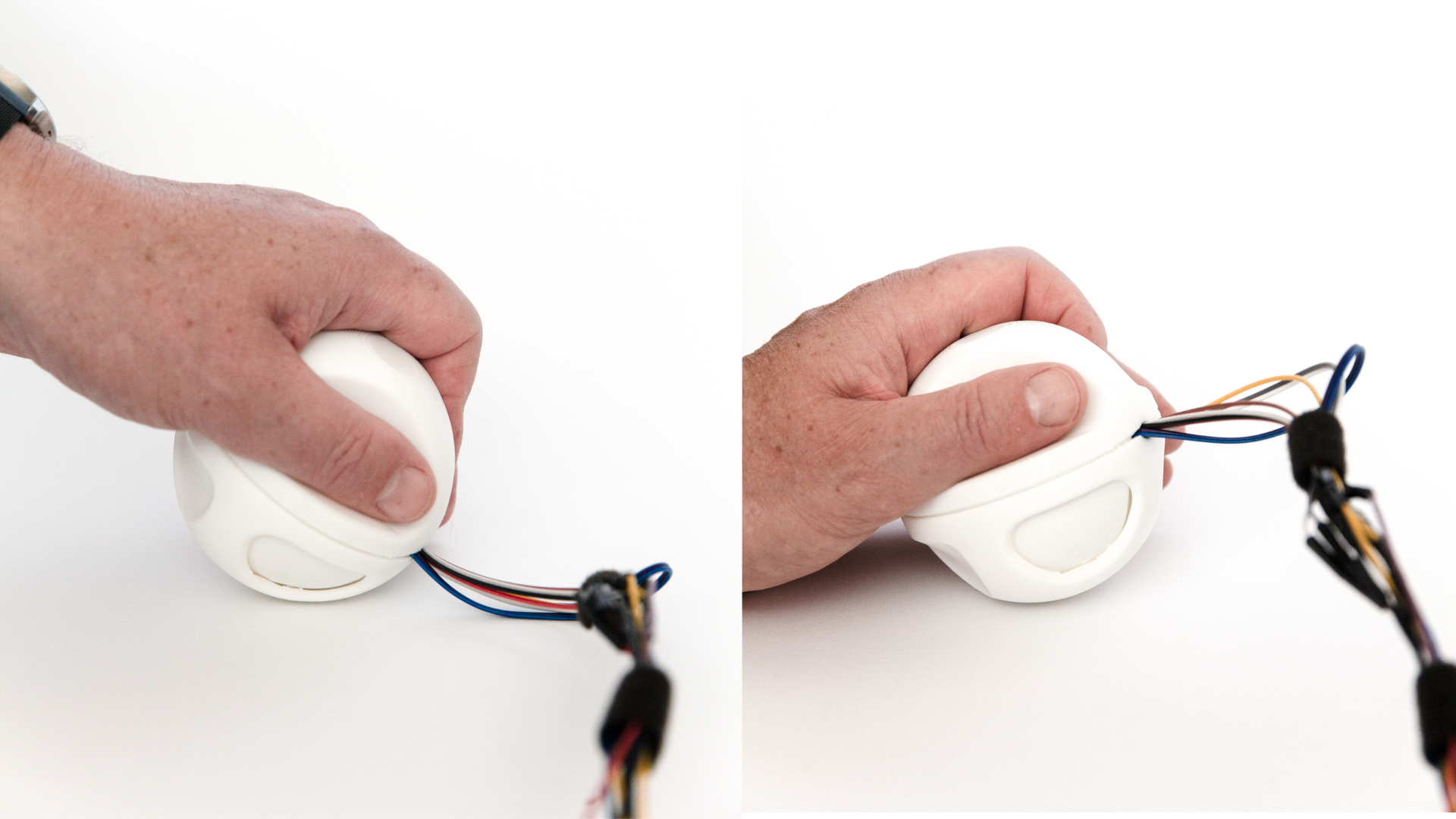
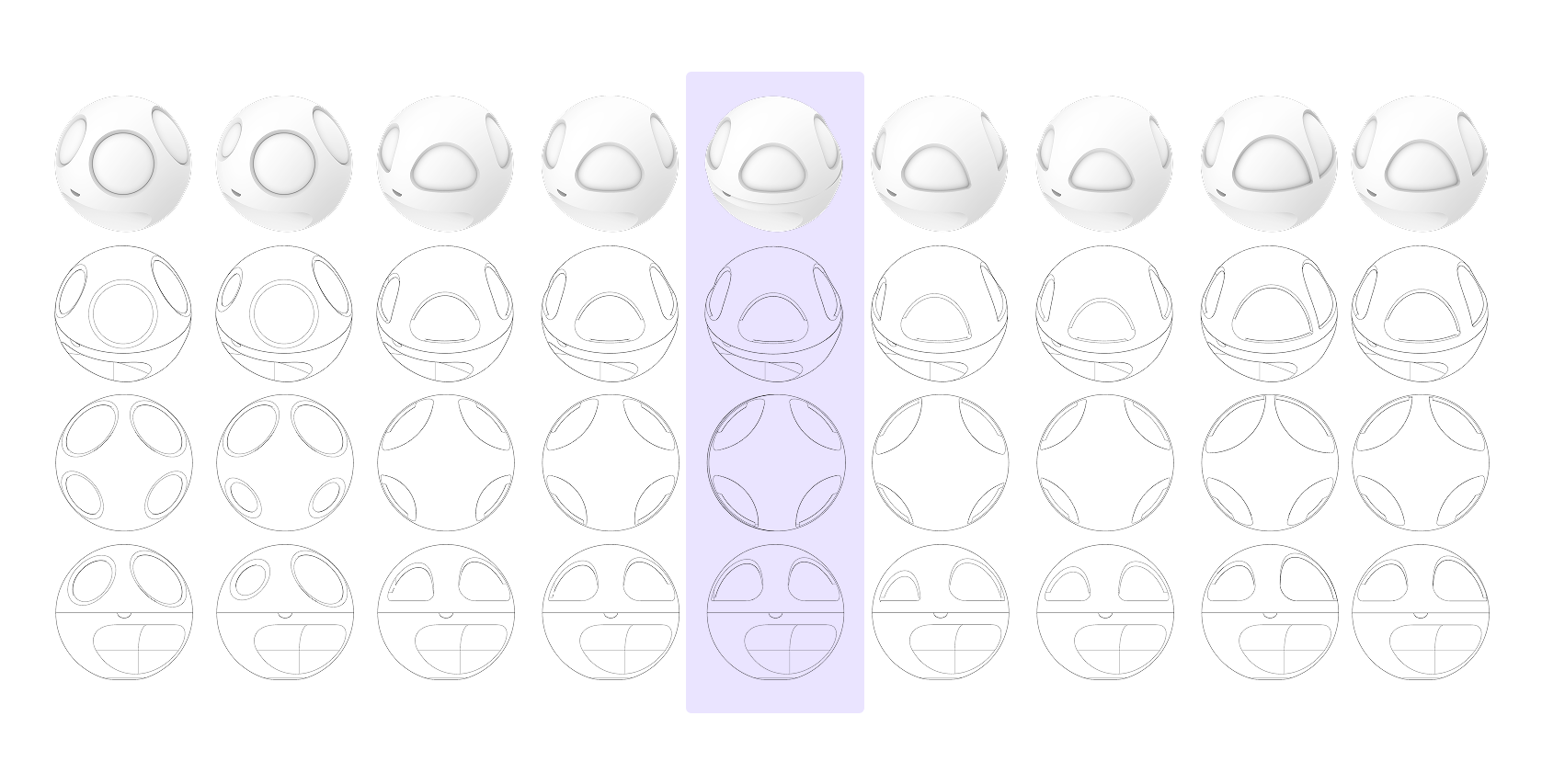
Die Grundidee war einen kugelförmige Controller, die mit einer Hand bedient werden kann. Die Funktion „Fahren“ befindet sich auf einer Seite, „Greifen“ auf der anderen. Um zwischen den beiden Funktionen zu wechseln, wird der Controller gewendet.
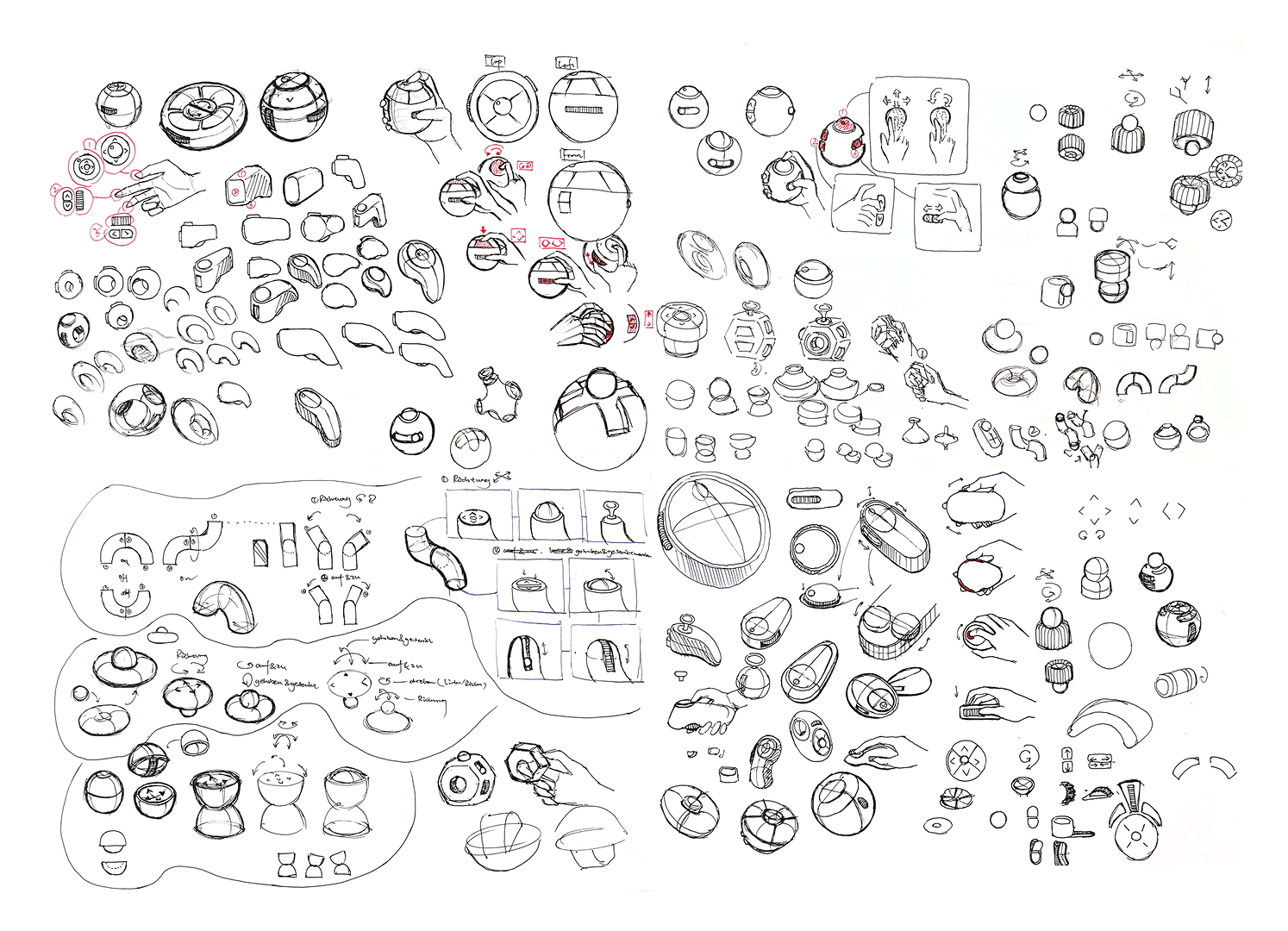
Inspiriert von „Kongming-Schlosses“ entstand die Idee, den Roboter allein durch Neigen der Kugel in verschiedene Richtungen zu steuern.
Wir entwickelten erste Funktionsprototypen und führten Nutzertests durch.
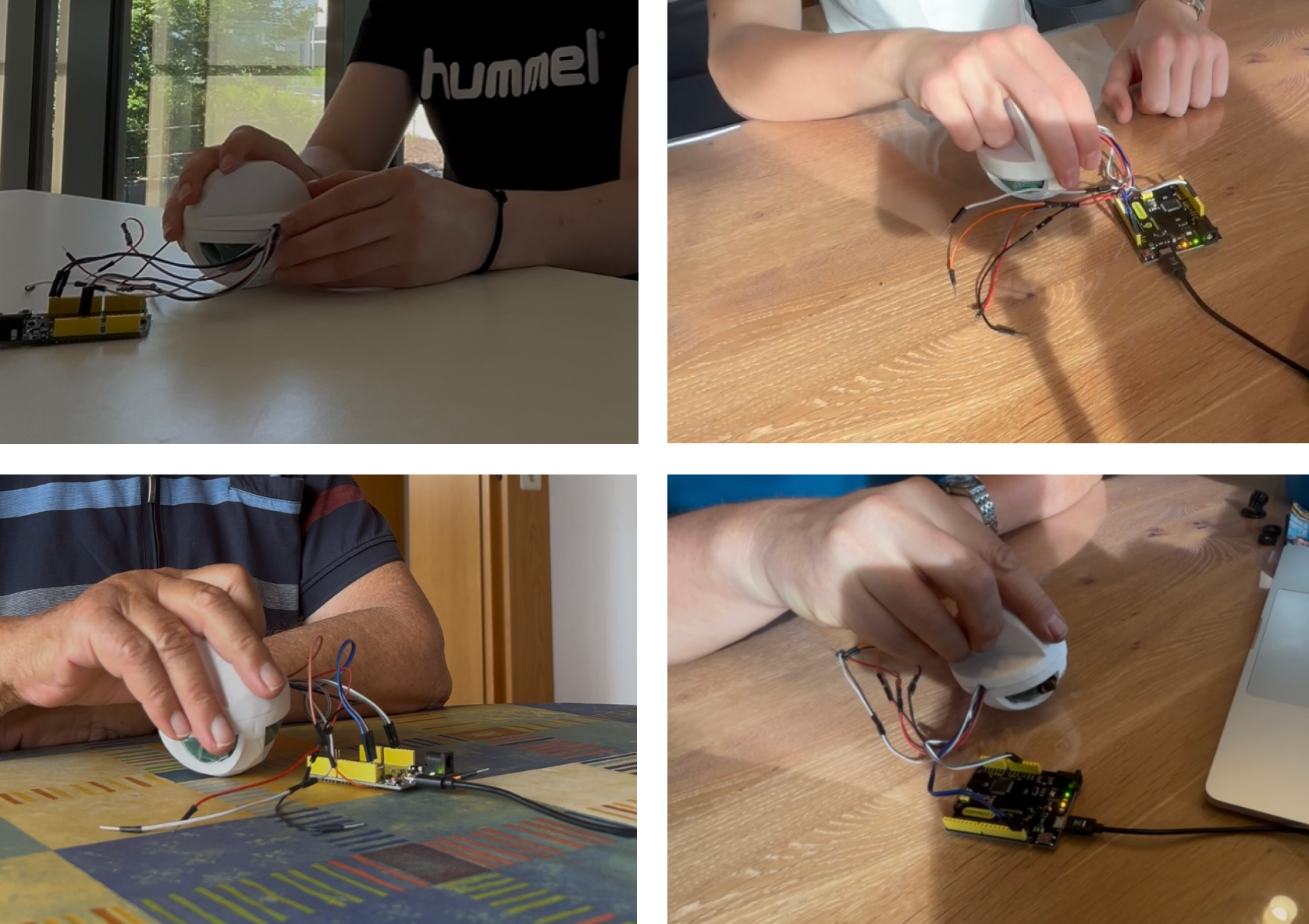
Dabei traten drei zentrale Probleme auf:
- Nutzer bemerkten nicht, wann der Controller gewendet werden sollte.
- Die Kugelform wirkte instabil beim Ablegen.
- Es fehlte an ergonomischer Orientierung für das Halten in der Hand.
Designentwicklung
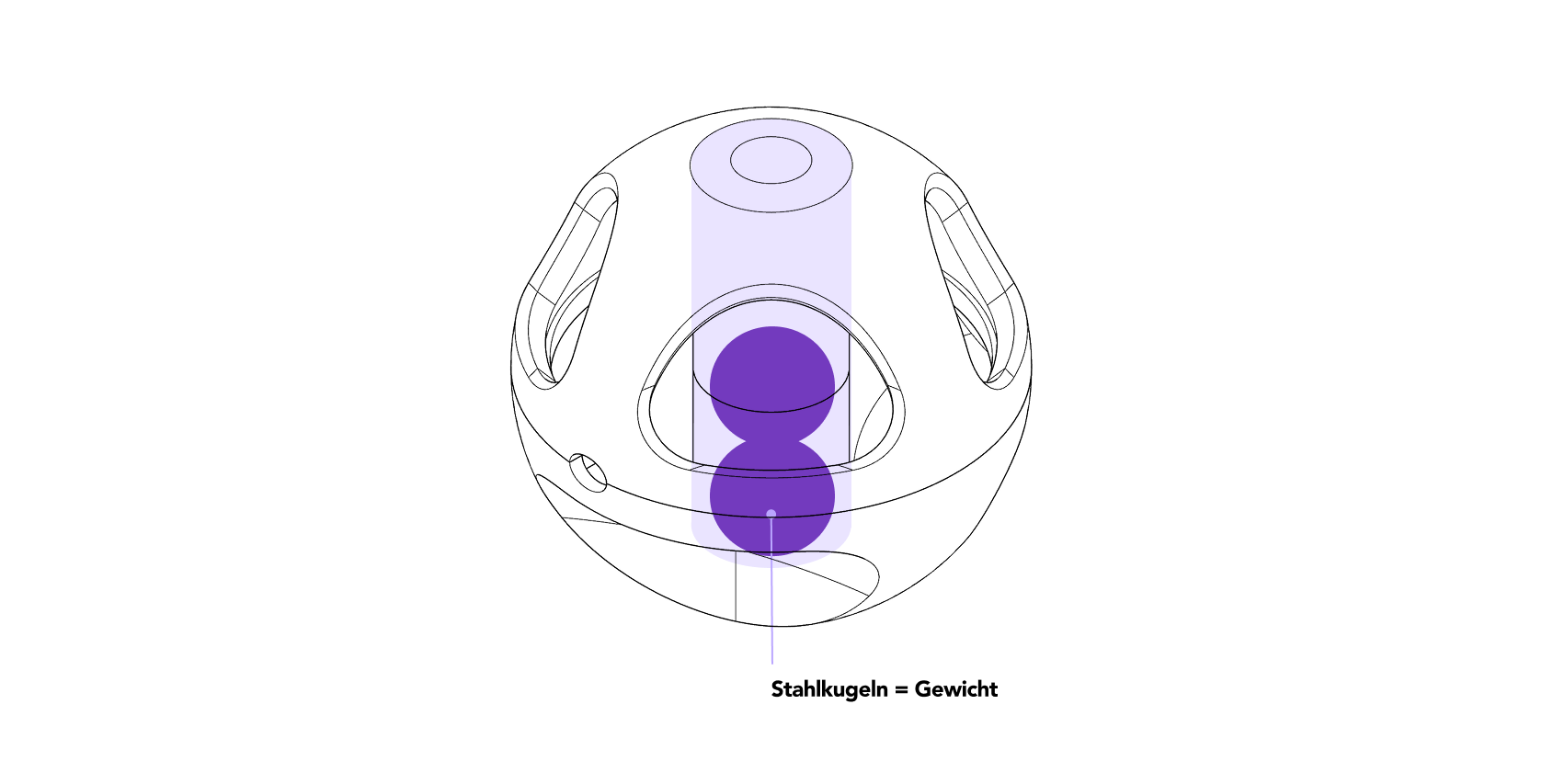
Basierend auf dem Nutzerfeedback entwickelten wir gezielte Lösungen:
- Ein vertikales Rohr mit zwei Stahlkugeln im Inneren erzeugt hör- und spürbares Feedback, wenn eine Drehung erforderlich ist.
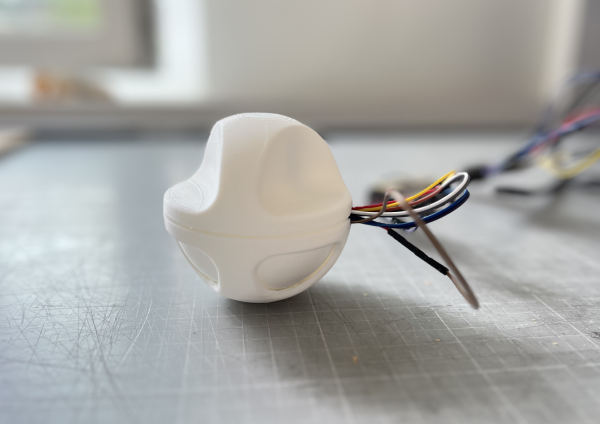
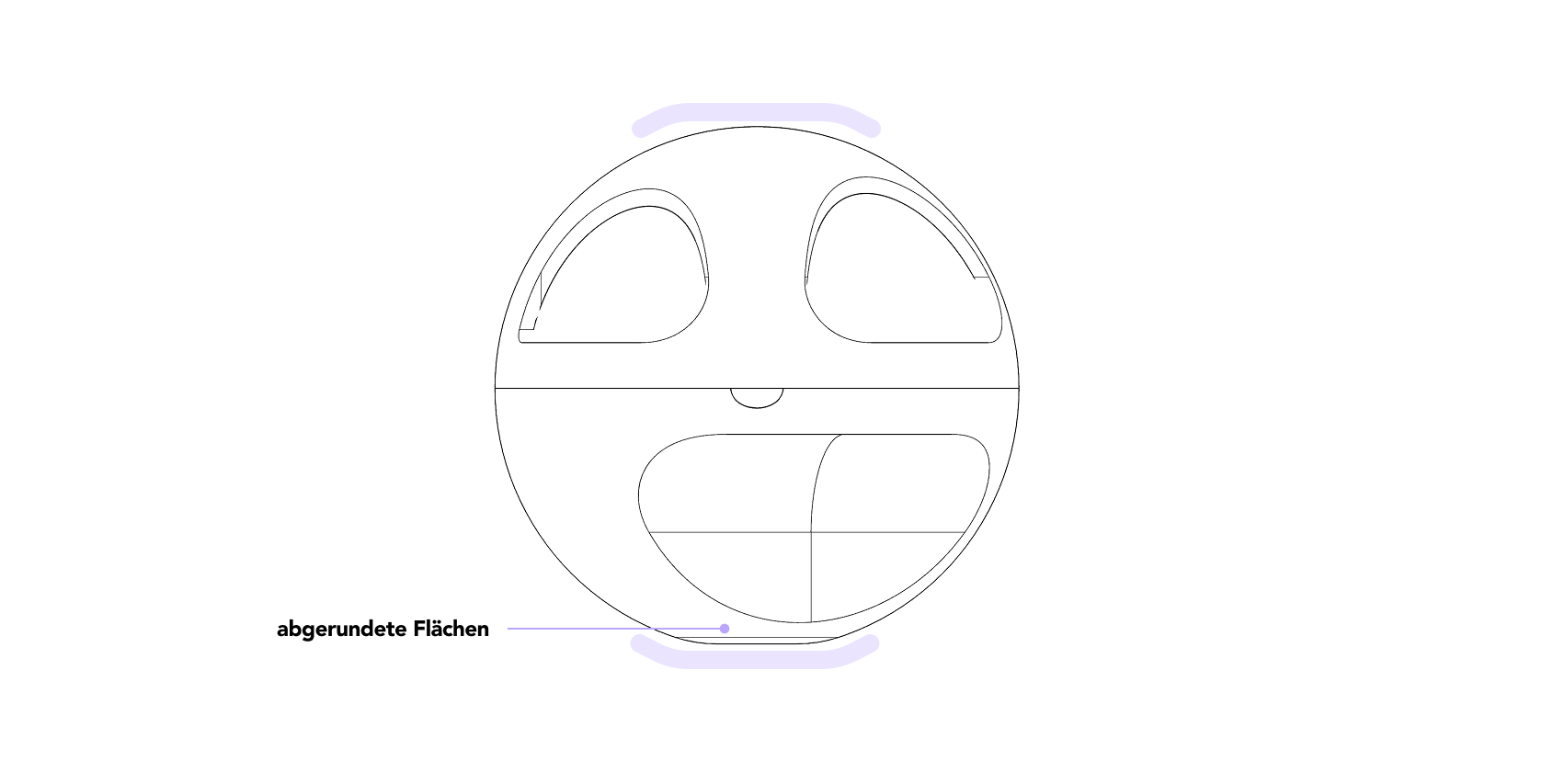
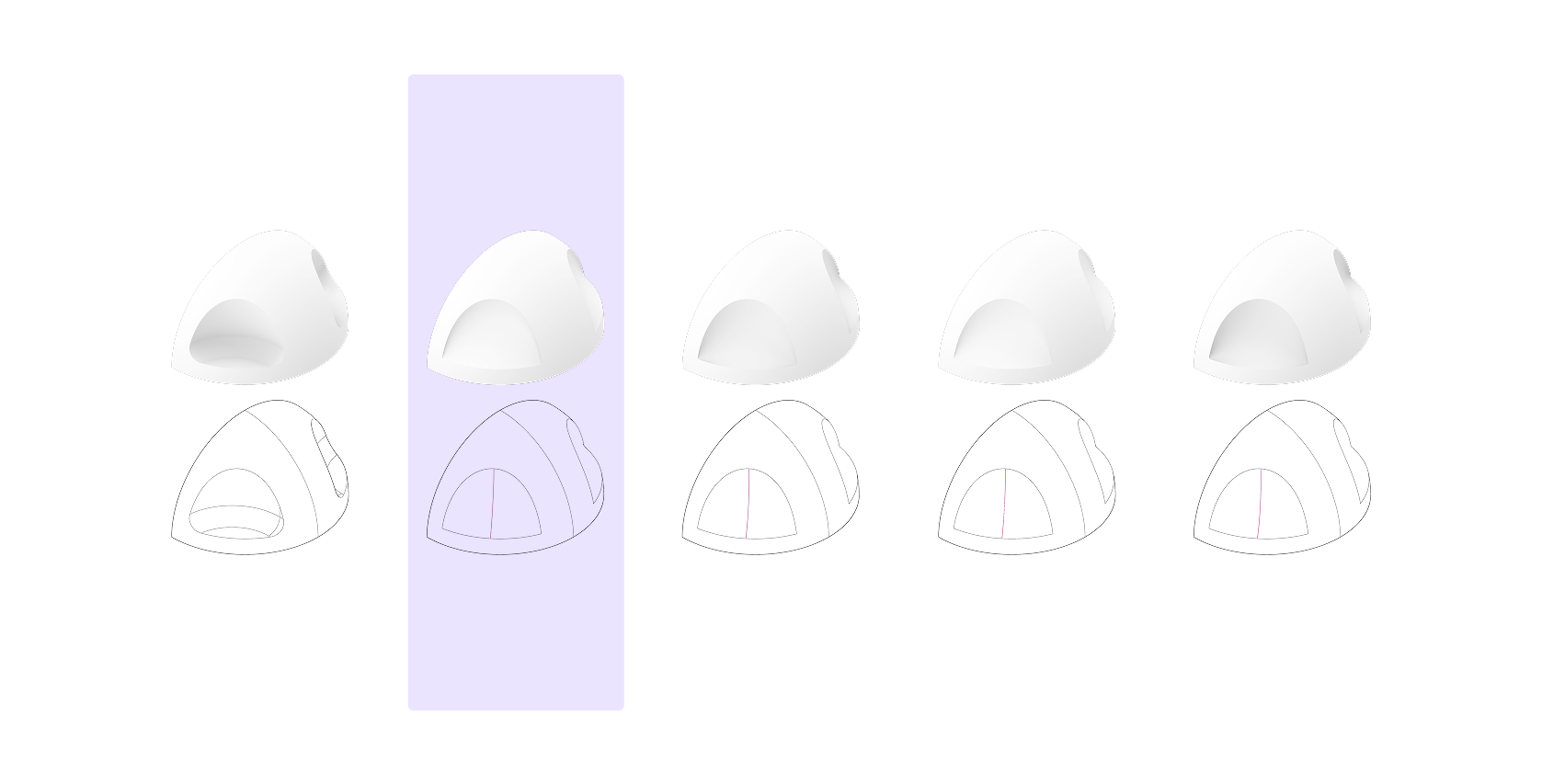
- Durch die abgerundeten Flächen oben und unten lässt sich der Controller stabil auf dem Tisch ablegen.
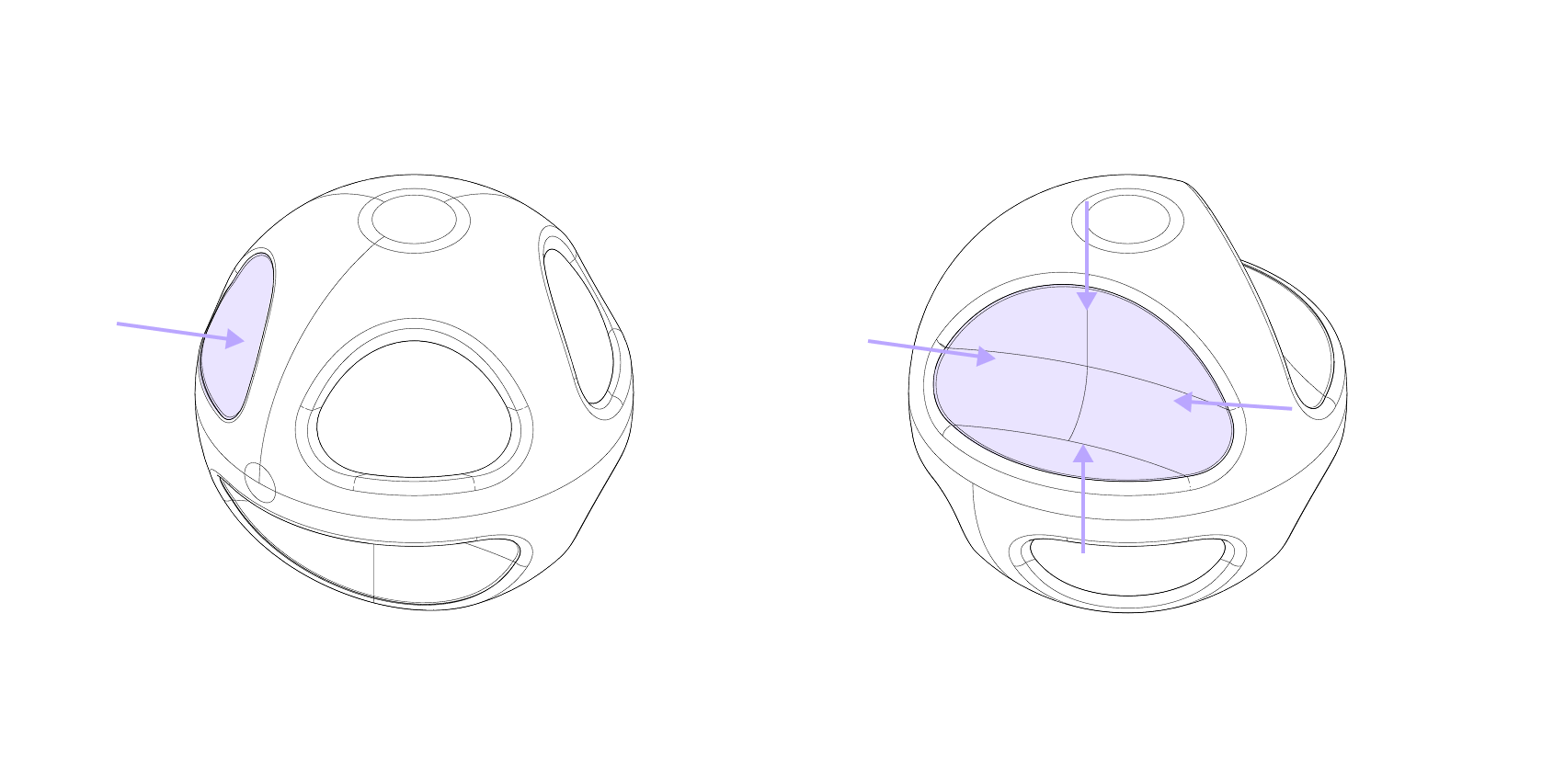
- Die obere Halbschale ist ergonomisch geformt: vorne schmal, hinten breit – dies unterstützt die natürliche Handhaltung und vermittelt gleichzeitig die Bewegungsrichtung.
Prototypen
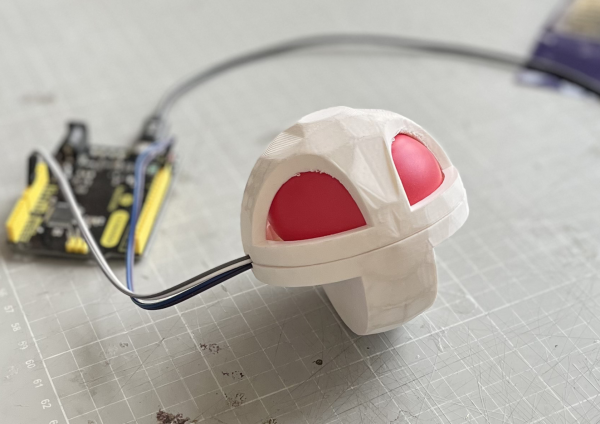
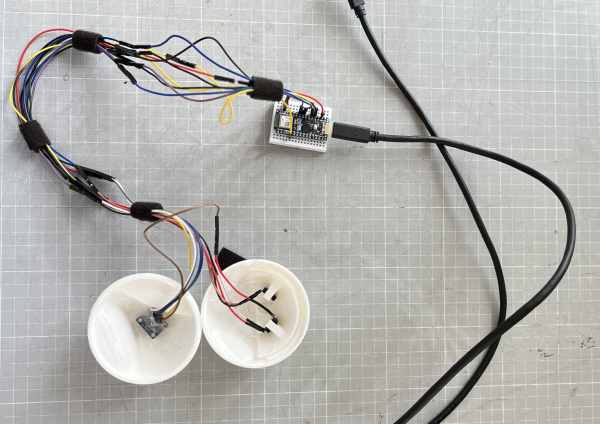
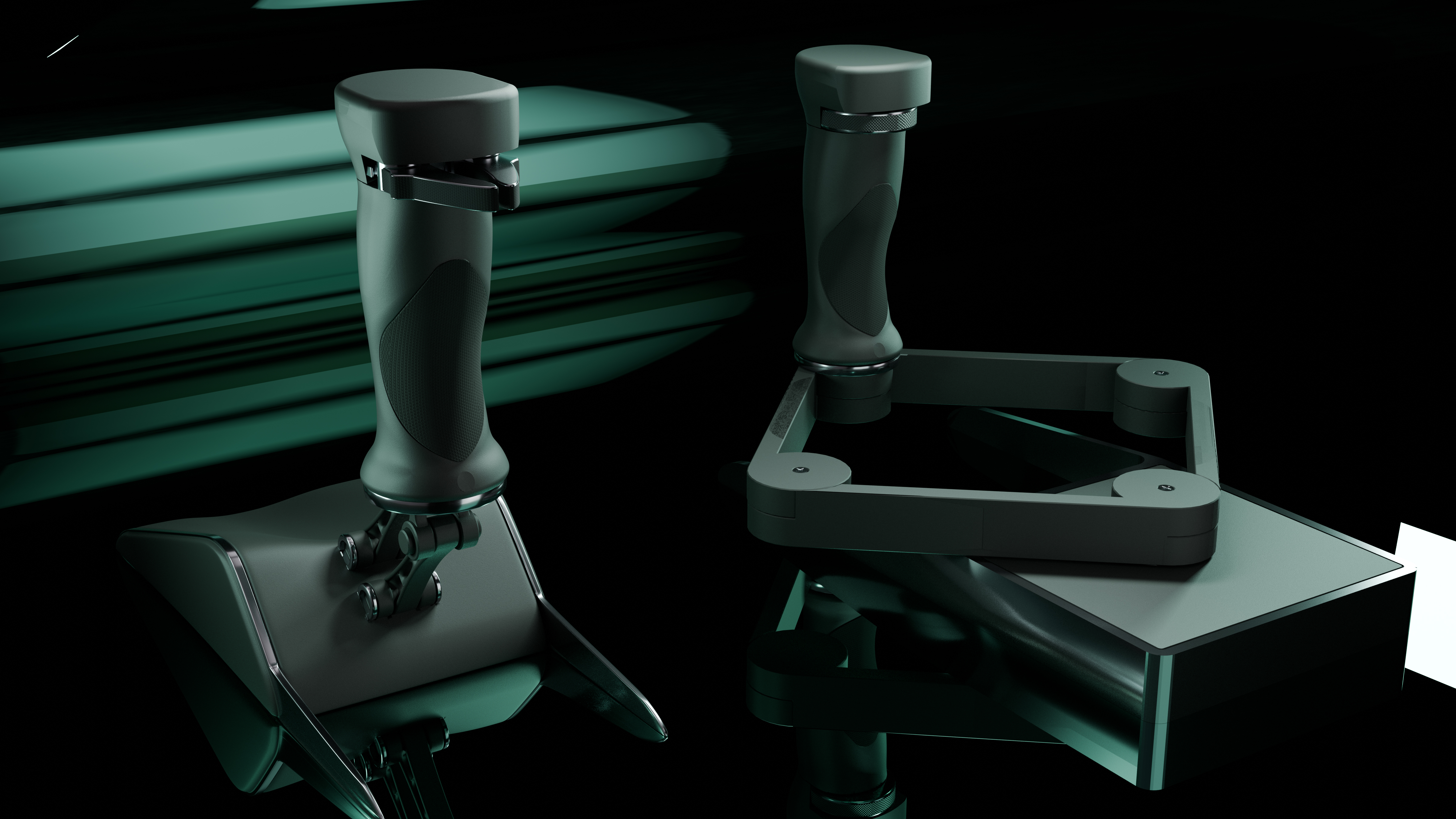
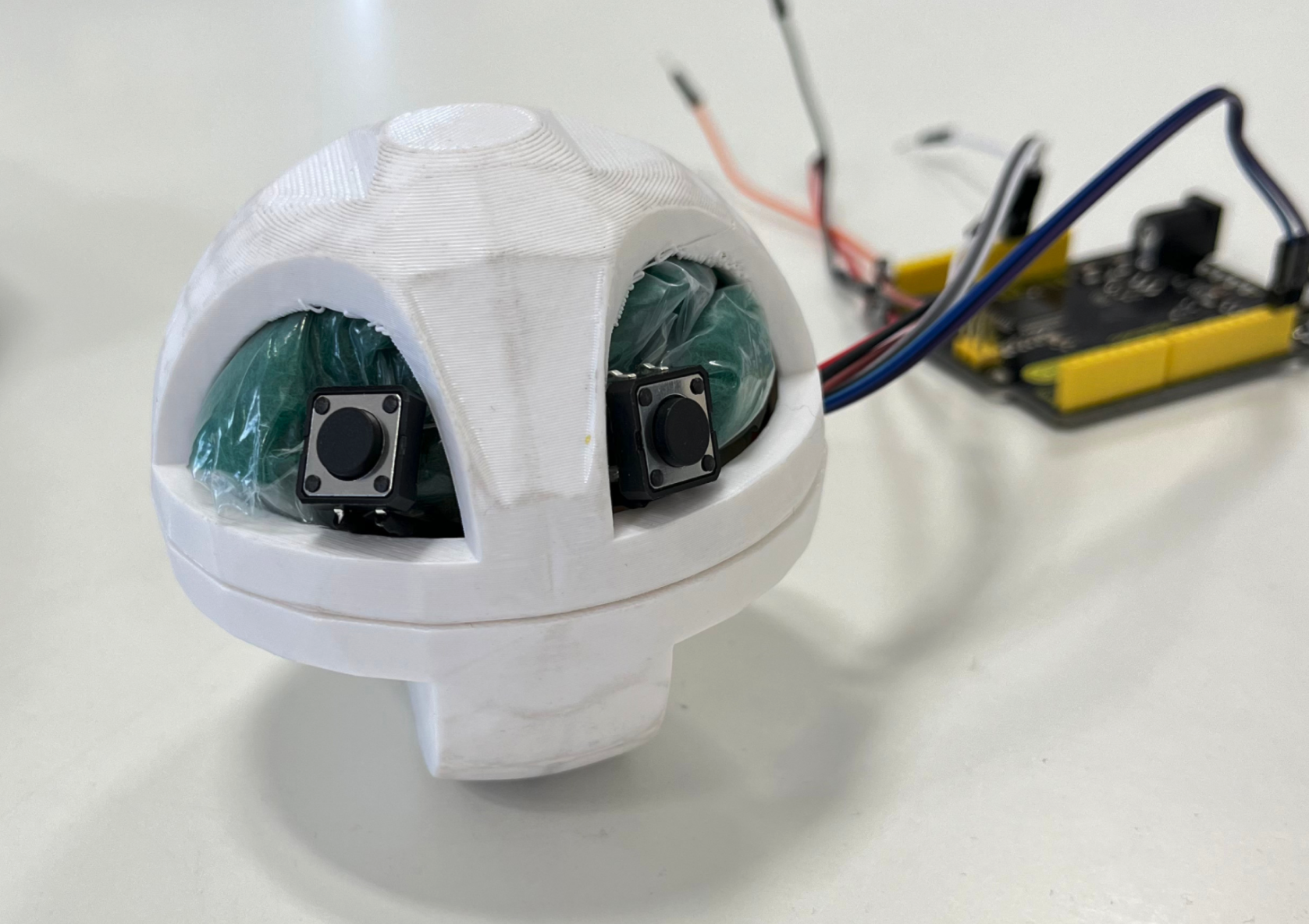
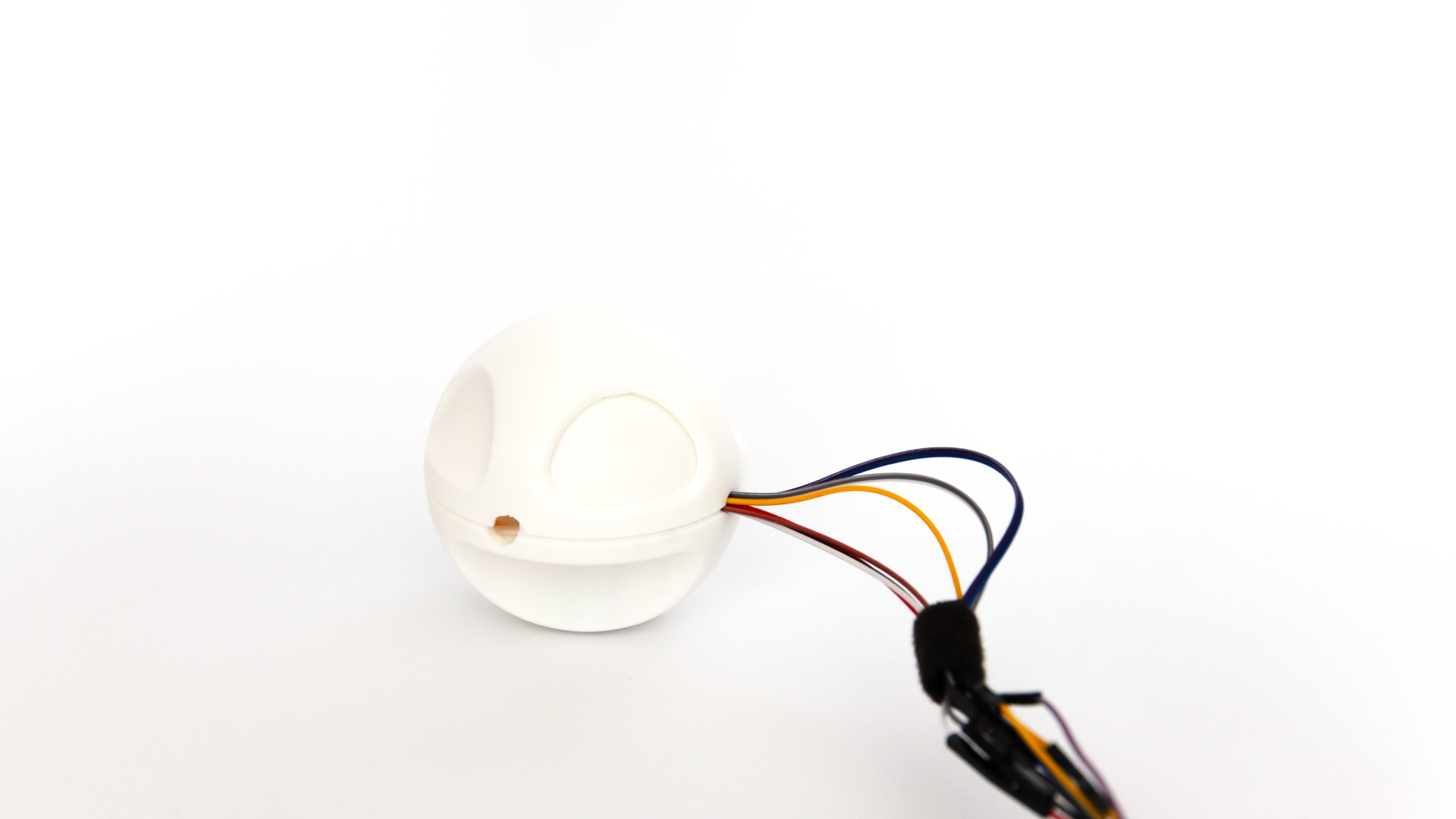
Funktionsprototyp
Im technischen Bereich wird in dieser Phase weiter vereinfacht: Das Vor- und Zurückfahren wird durch Vor- und Zurückneigen gesteuert, das Kurvenfahren durch Links- und Rechtsneigen. Auf der anderen Seite, beim Greifen, wird das Hoch- und Runterfahren des Arms ebenfalls durch Vor- und Zurückneigen kontrolliert. Die Knöpfe steuern Auf und Zu, wobei die Knöpfe gleichzeitig gedrückt werden müssen, einmal Auf, einmal Zu, und so wiederholt sich das immer wieder.
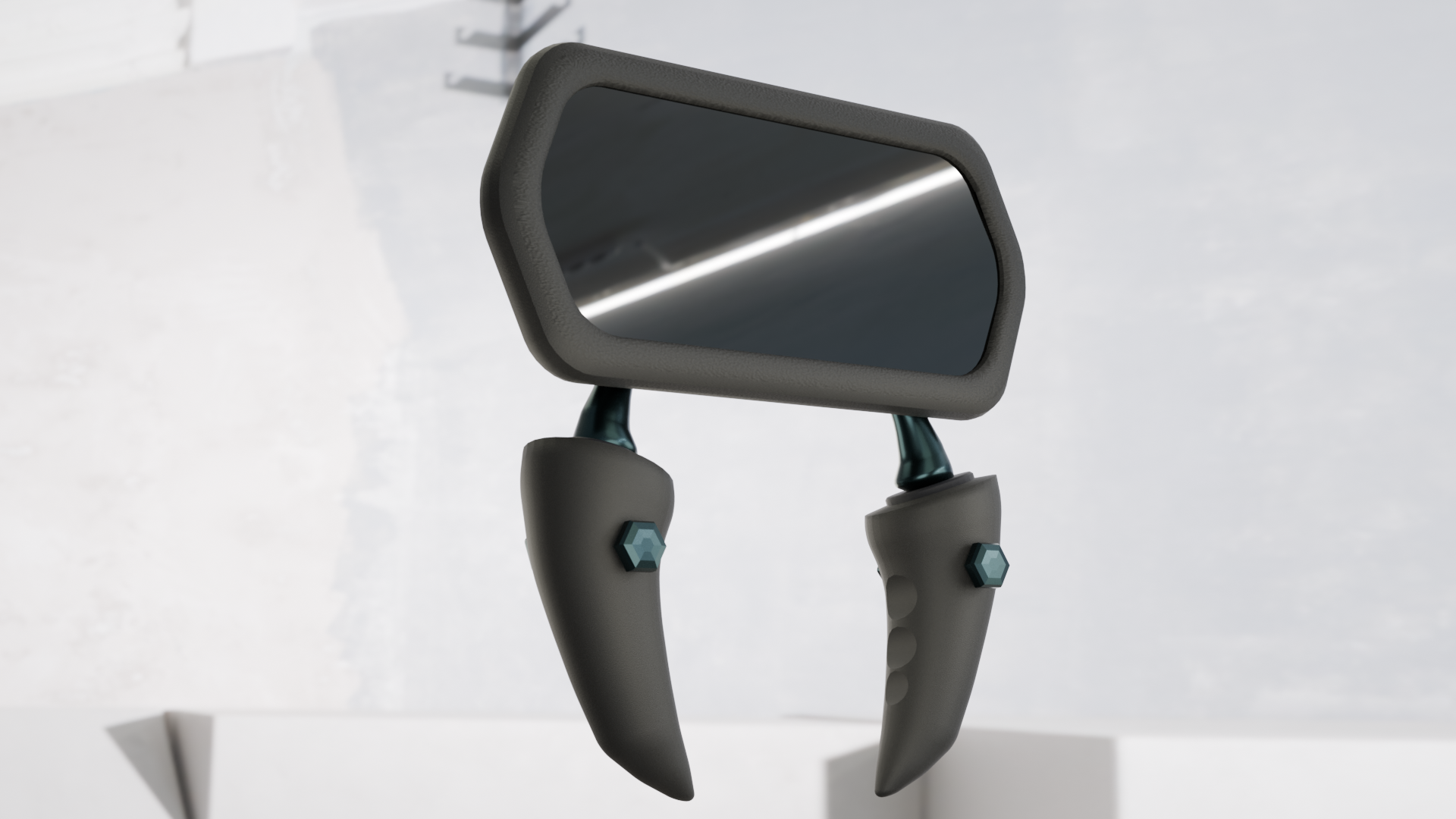
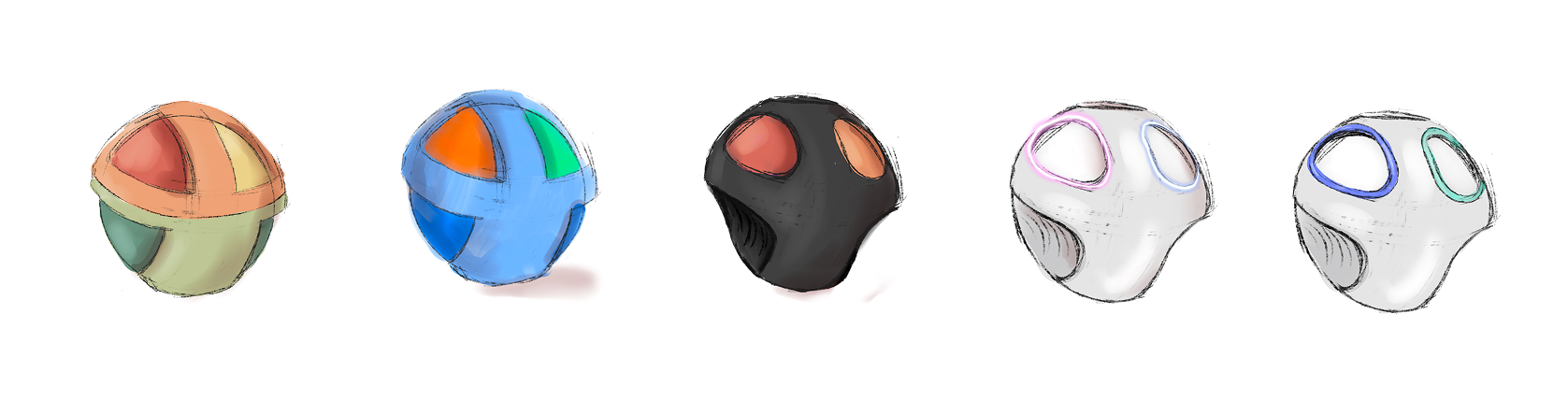
Designprototyp
Weiterentwicklung der äußeren Form und Erprobung unterschiedlicher Farbvarianten zur Hervorhebung der Interaktionsflächen.

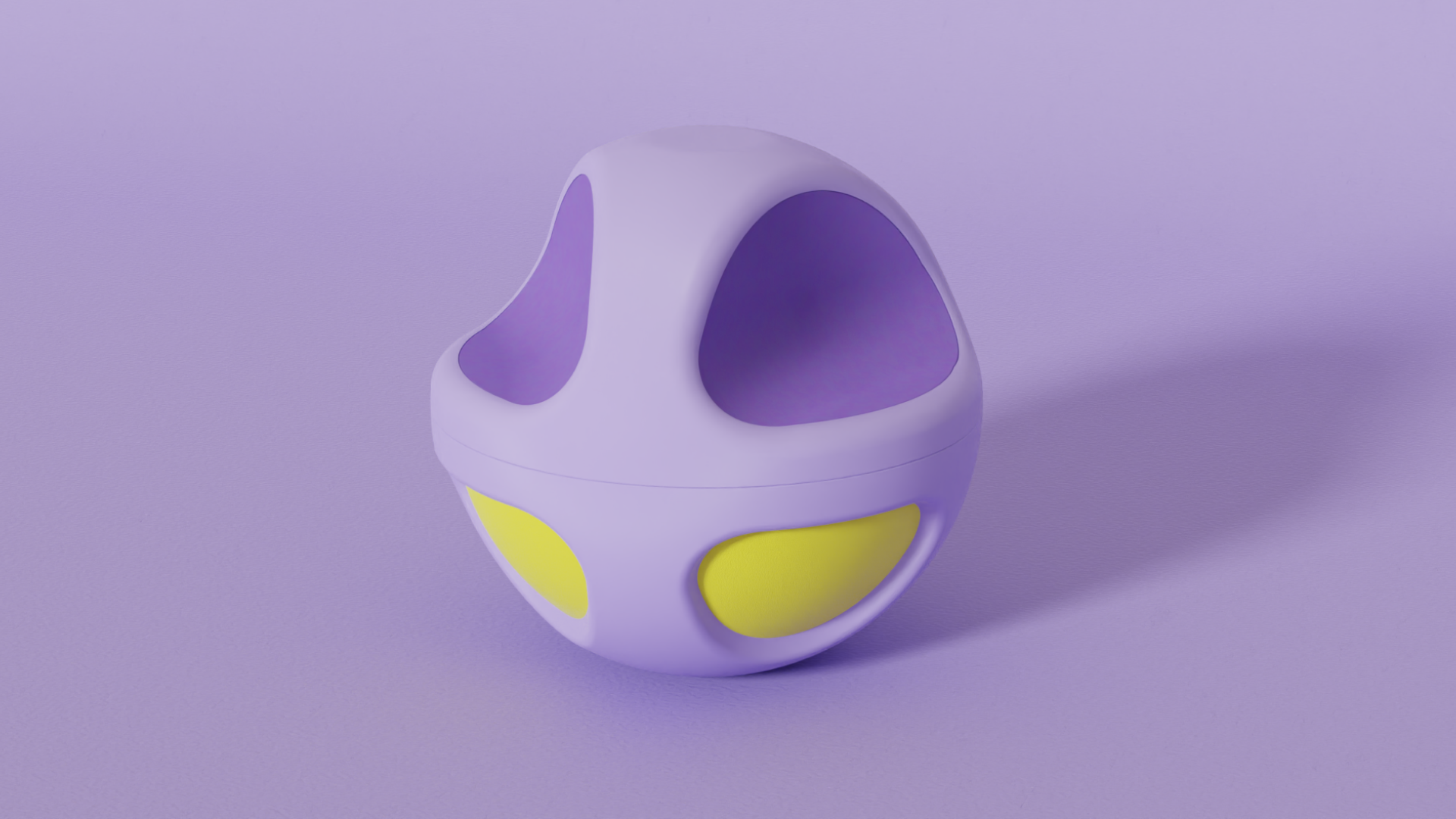
Ergebnis
Unsere finale Version kombiniert Form, Funktion und Material zu einem stimmigen Gesamtkonzept. Die Farbgebung sorgt für eine klare Unterscheidung der Steuerflächen.
Wir entwickelten zudem die Markenidentität mit dem Namen orb und einem passenden typografischen Konzept. Das Design wird durch Verpackung und Anleitung ergänzt, die sowohl funktional als auch gestalterisch auf das Produkt abgestimmt sind.