Interface Design 1
GForce
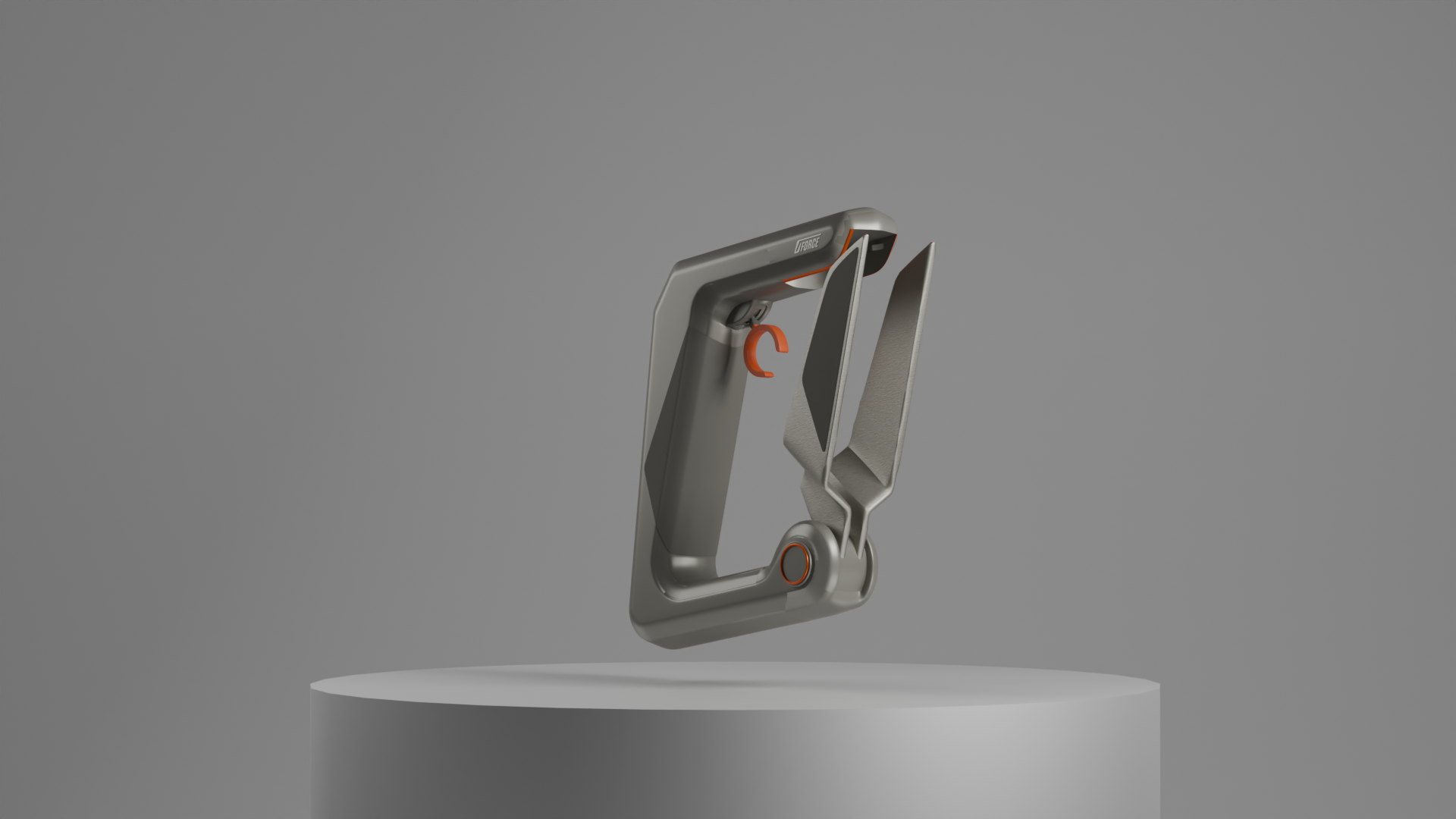
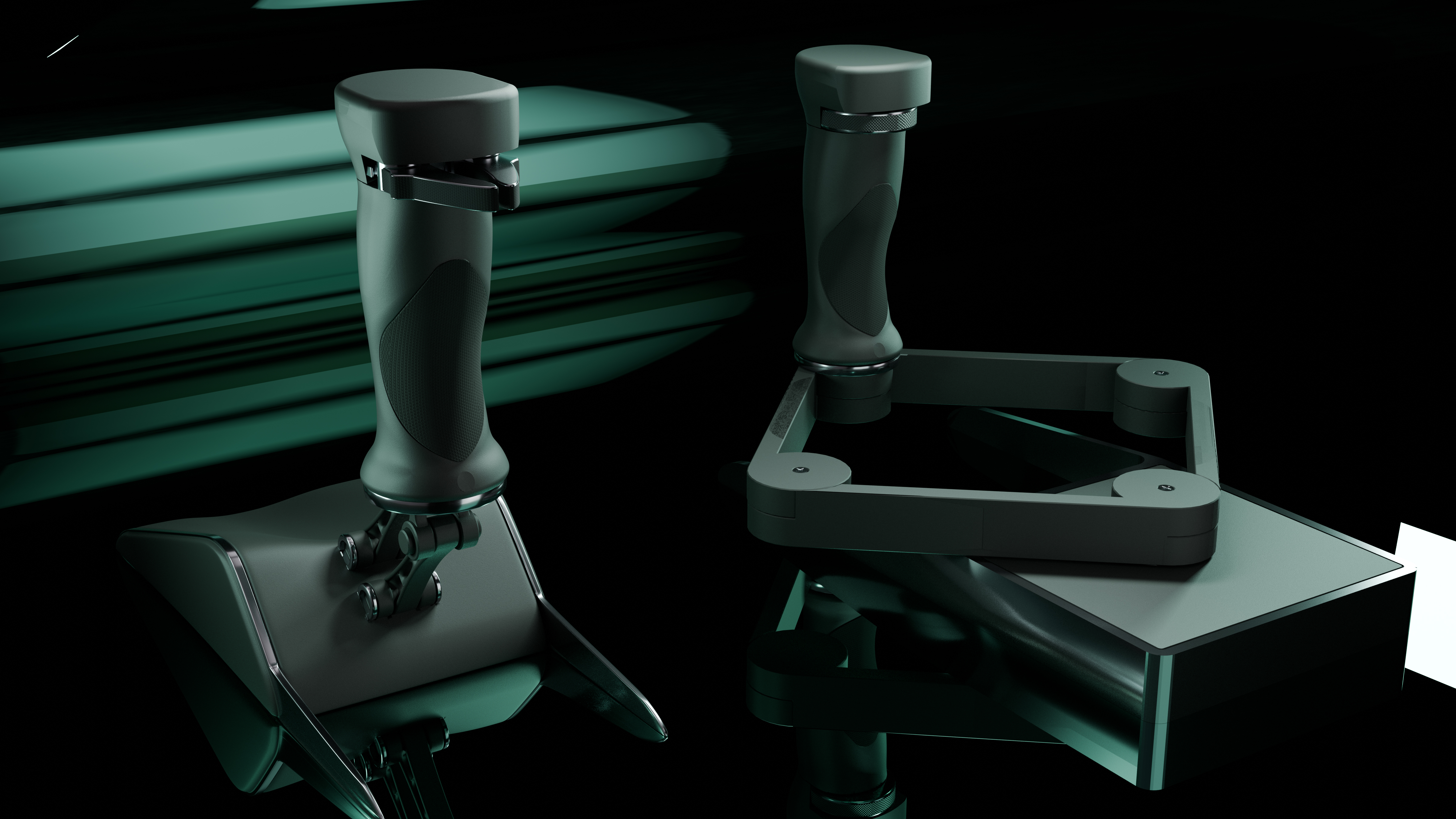
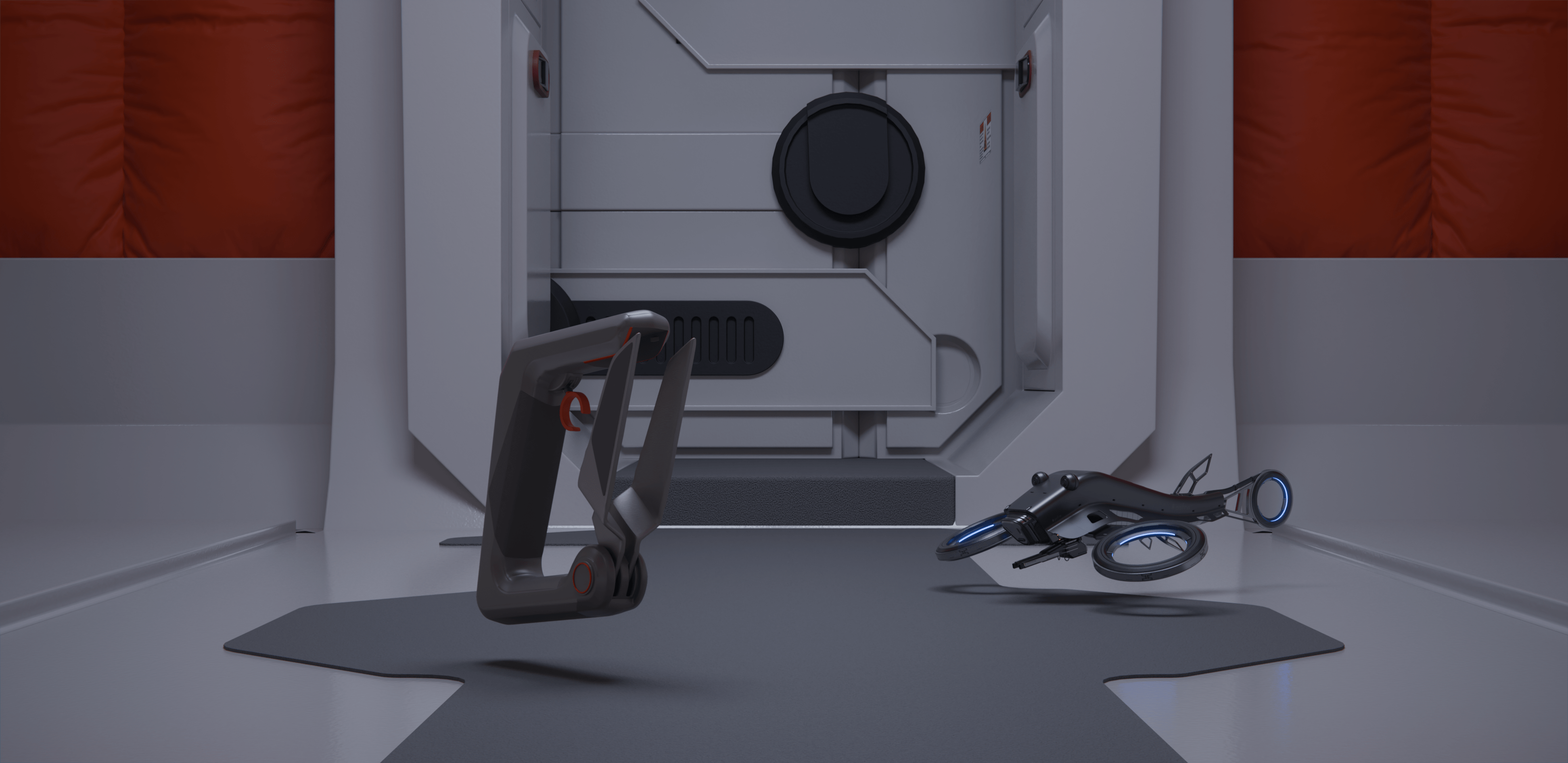
Der Controller GFORCE überzeugt durch eine klare, reduzierte Formensprache und eine intuitive Bedienung. Die Fahr- und Greiffunktionen sind bewusst voneinander getrennt, was eine einfache und nutzerfreundliche Steuerung ermöglicht. Durch die parallele Geometrie wirkt das Gerät aufgeräumt und strukturiert. Das futuristische Design erinnert an Science-Fiction, bleibt dabei aber funktional und übersichtlich.
Konzept
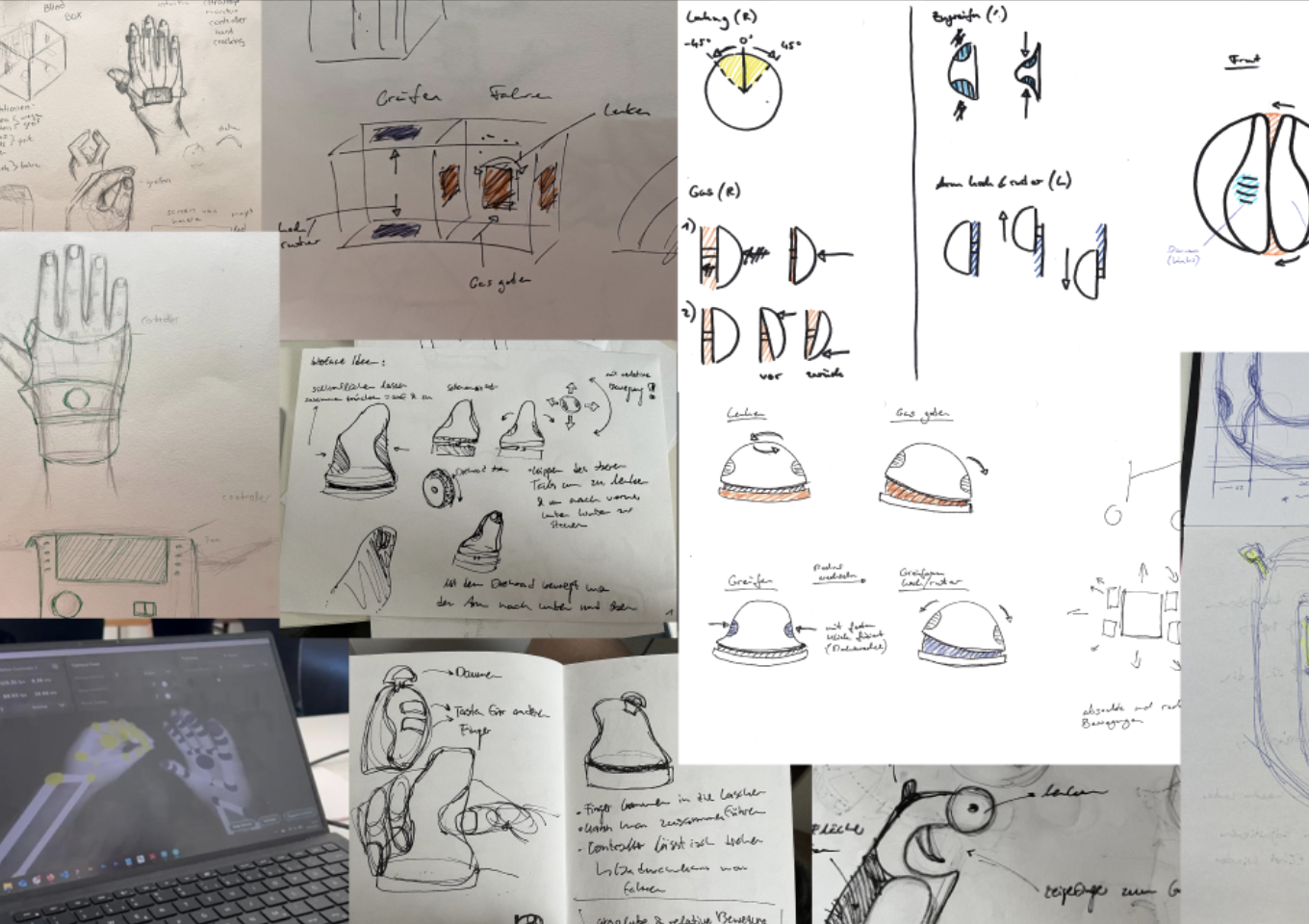
Bereits in den ersten Skizzen entwickelte sich die Idee, die Funktionen „Fahren“ und „Greifen“ klar voneinander zu trennen – sowohl funktional als auch haptisch. Deshalb entschieden wir uns, die Steuerung auf beide Hände aufzuteilen. Auf dieser Grundlage entstanden verschiedene Entwürfe.
Die Grundform des Controllers basiert auf dem Prinzip dieser Trennung und zeichnet sich durch klare Linien und parallele Strukturen aus. Die Verjüngung des Griffs nach oben signalisiert intuitiv, wo der Controller gegriffen werden soll.
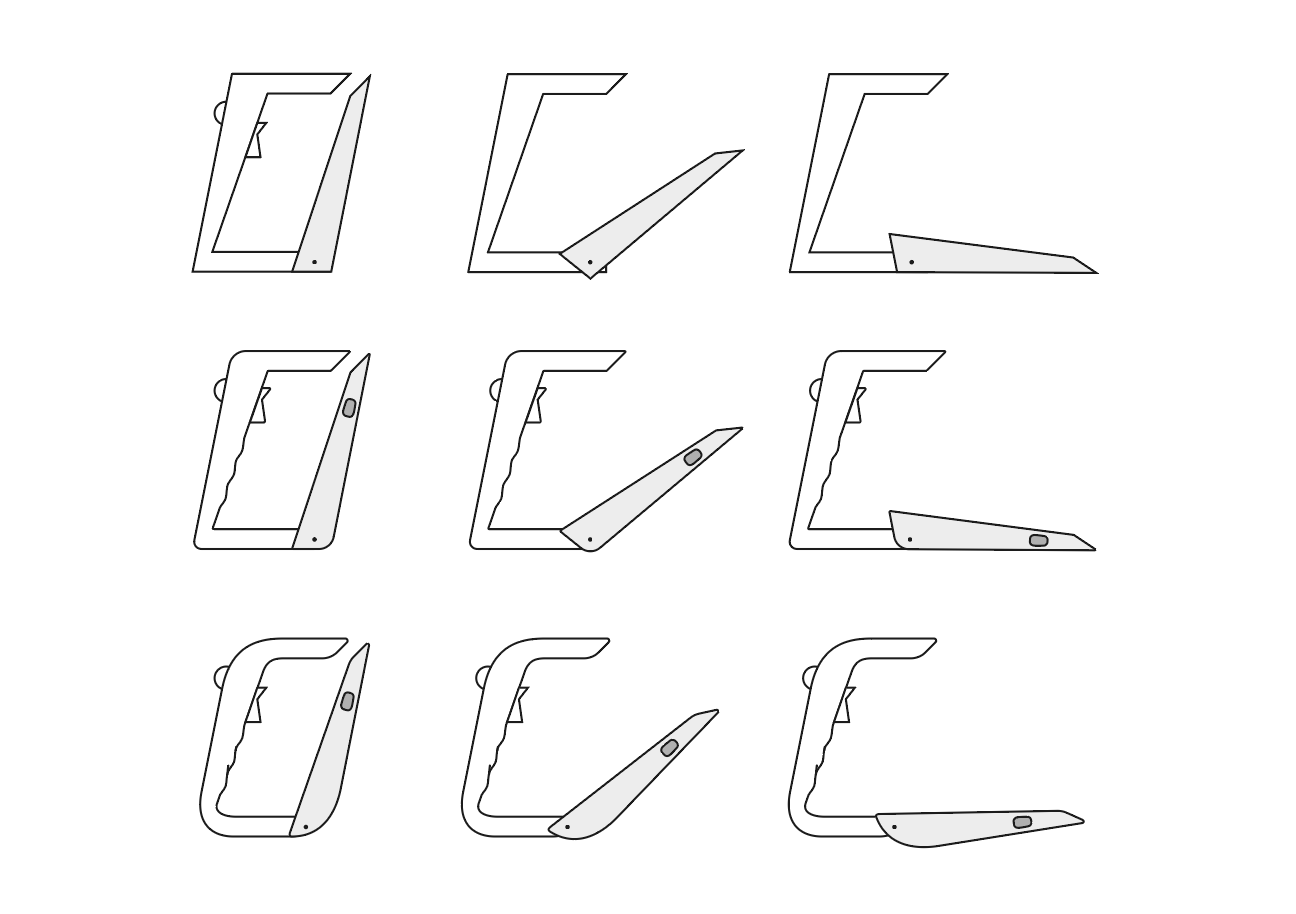
Im weiteren Verlauf kam die Idee auf, den hinteren Teil des Controllers nach unten klappbar zu gestalten. Diese Bewegung unterstützt die natürliche Handbewegung beim Greifen und vermittelt das Gefühl, den Greifarm direkt nach unten zu führen. Das sorgte für mehr Klarheit in der Bedienung und ein deutlich intuitiveres Nutzererlebnis.
User Testing
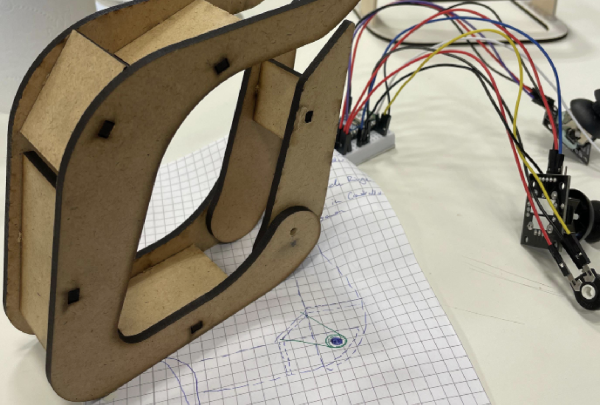
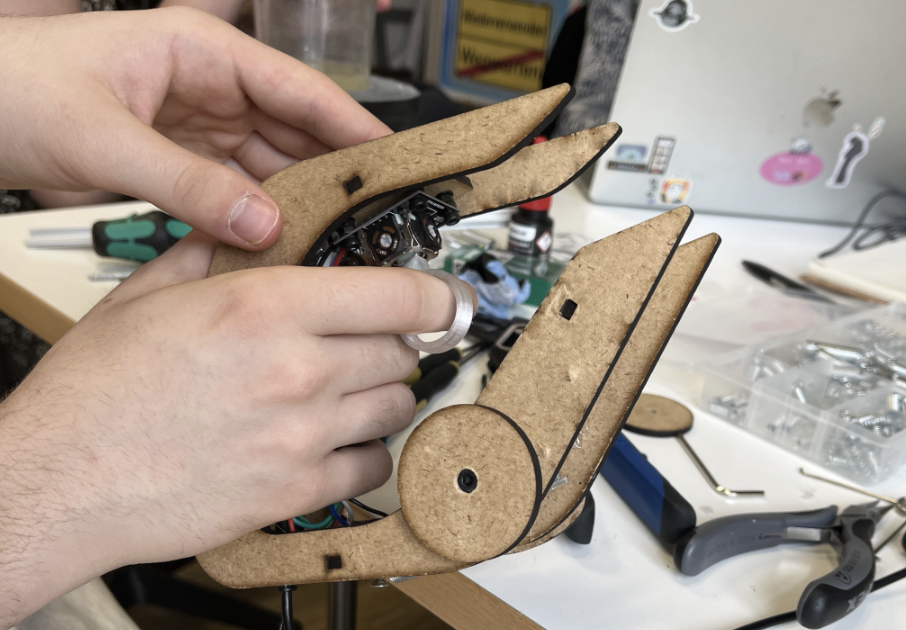
Im Anschluss gingen wir mit dem von uns gebauten Prototypen in den User Tests, um die Haptik der Form selbst und den anderen Steuerungselementen zu testen.
In den Usertests kam fogendes heraus:

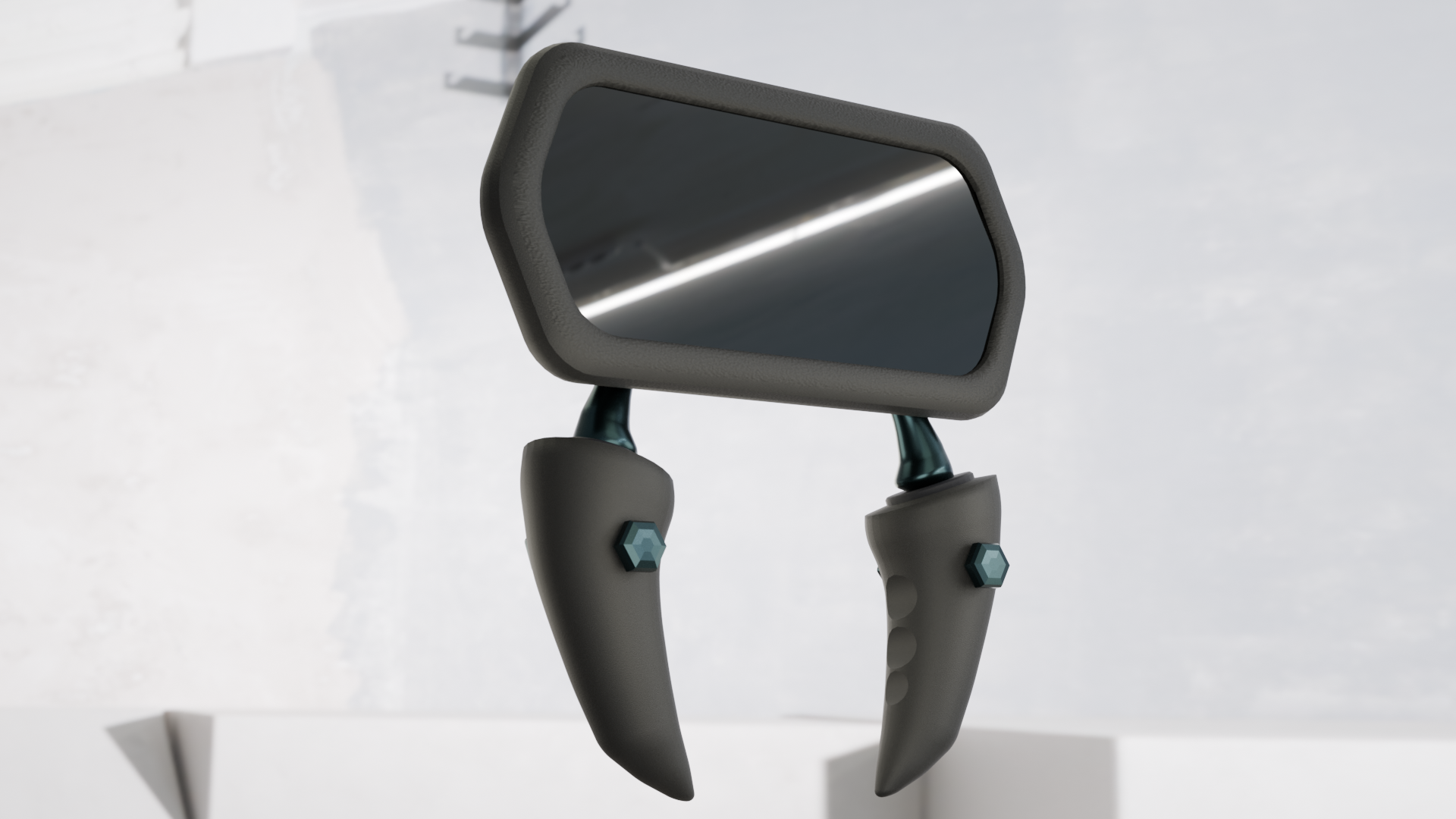
Zum einen sollte der Griff haptisch optimiert werden – beispielsweise durch eine Riffelung, die für besseren Halt sorgt.
Außerdem wurde angemerkt, dass der Joystick für die Lenkung aktuell auch Bewegungen nach oben und unten suggeriert. Um die Funktion klarer zu kommunizieren, sollte er stärker auf die horizontale Bewegung (links/rechts) fokussiert sein.

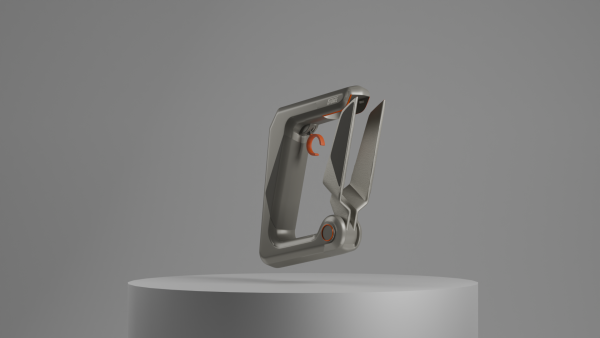
Im Usertesting zeigte sich zudem, dass der geschlossene Ring zum Beschleunigen und Rückwärtsfahren nicht optimal war. Stattdessen wurde ein halboffener Ring empfohlen, der die Bedienung intuitiver und angenehmer macht.
Optimierung
Mit den neu gewonnenen Erkenntnissen haben wir den Prototyp überarbeitet: Die Griffflächen wurden durch gummierte Bereiche ersetzt, um die Haptik zu verbessern.
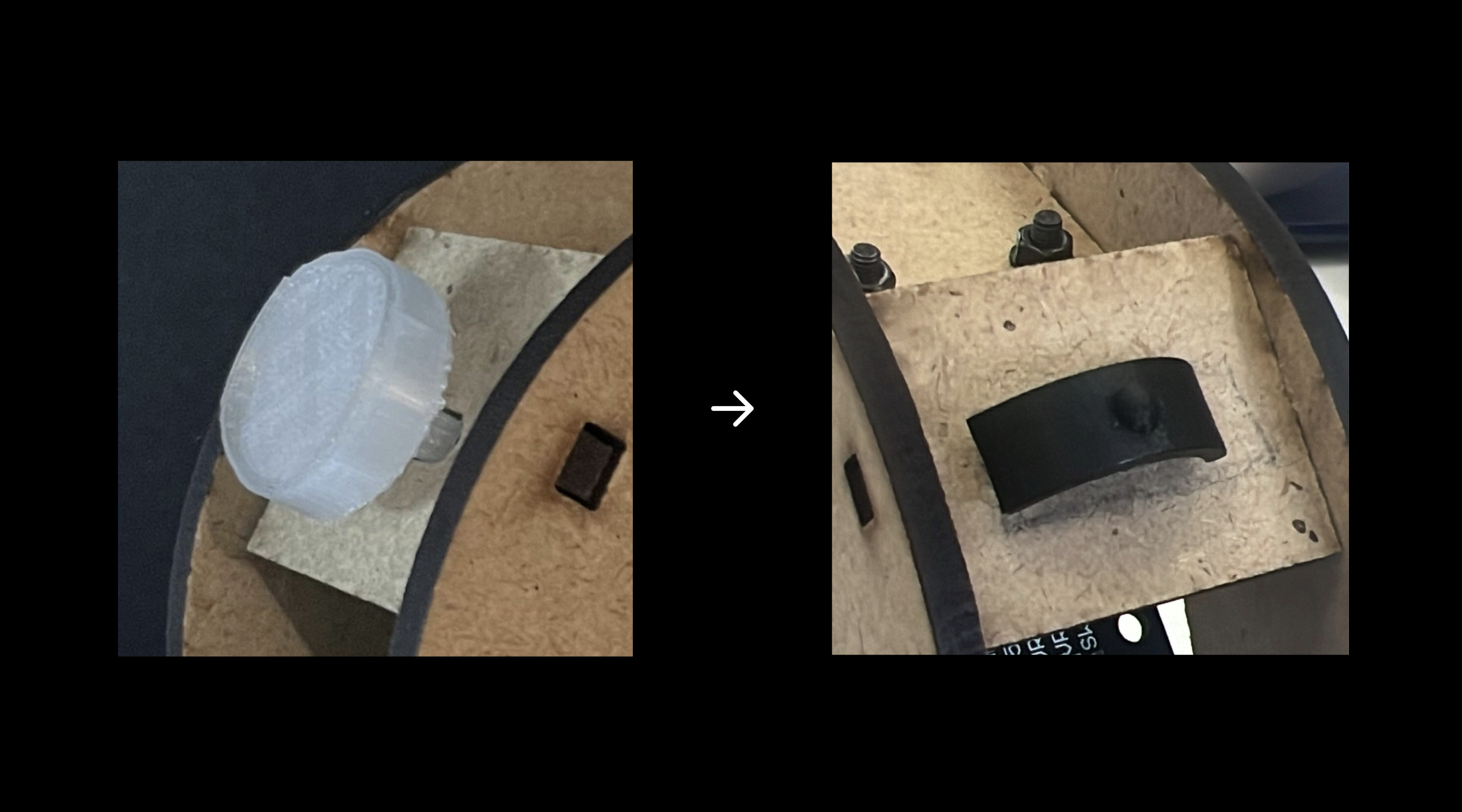
Der bisherige Joystick wurde durch ein drehbares Mausrad mit spürbarem Nullpunkt ersetzt, das eine präzisere Steuerung nach links und rechts ermöglicht.
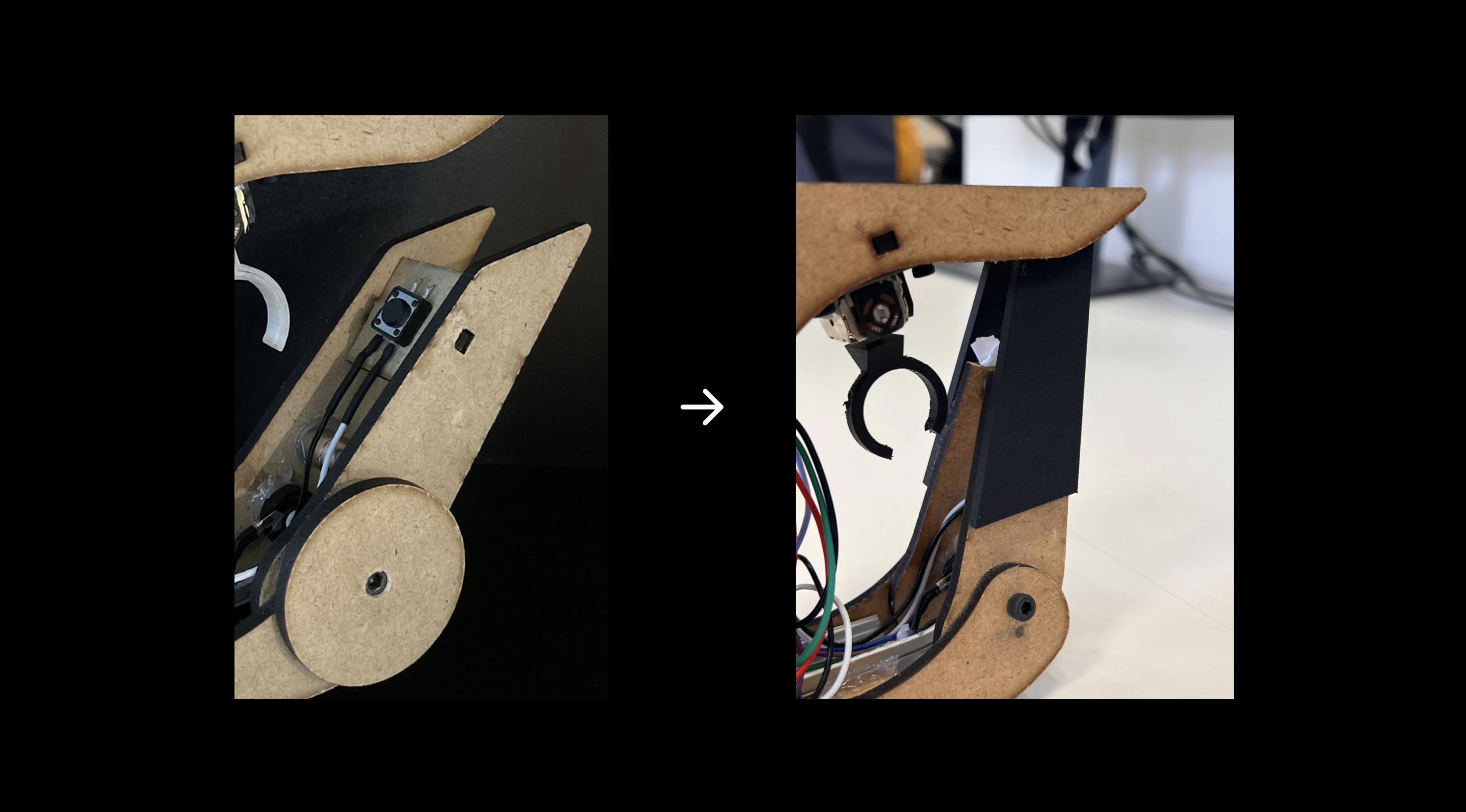
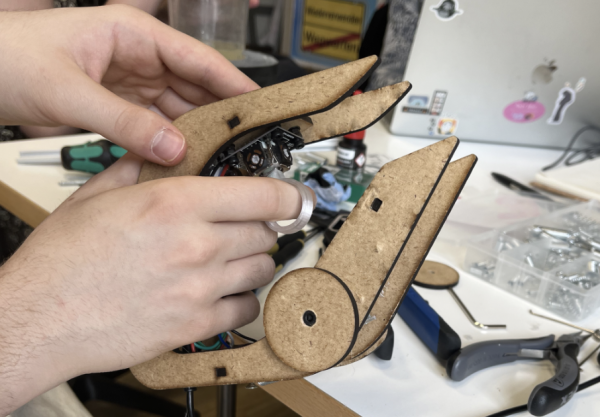
Außerdem wurde der klappbare Schwenkarm durch eine pinzettenartige Konstruktion ersetzt, mit der sich der Greifarm des Roboters intuitiv zusammendrücken lässt.
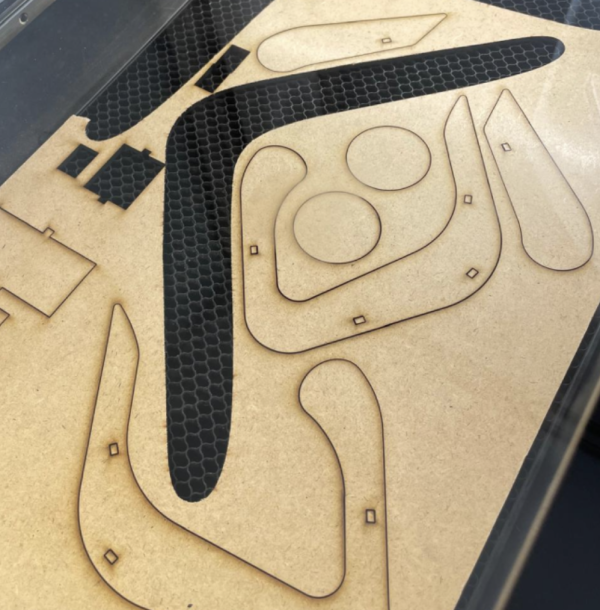
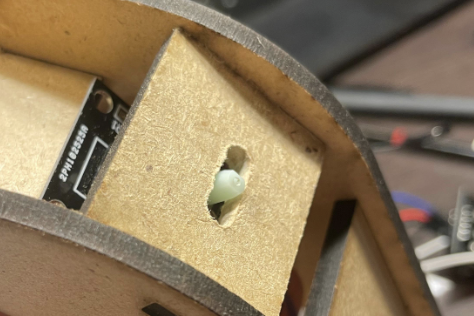
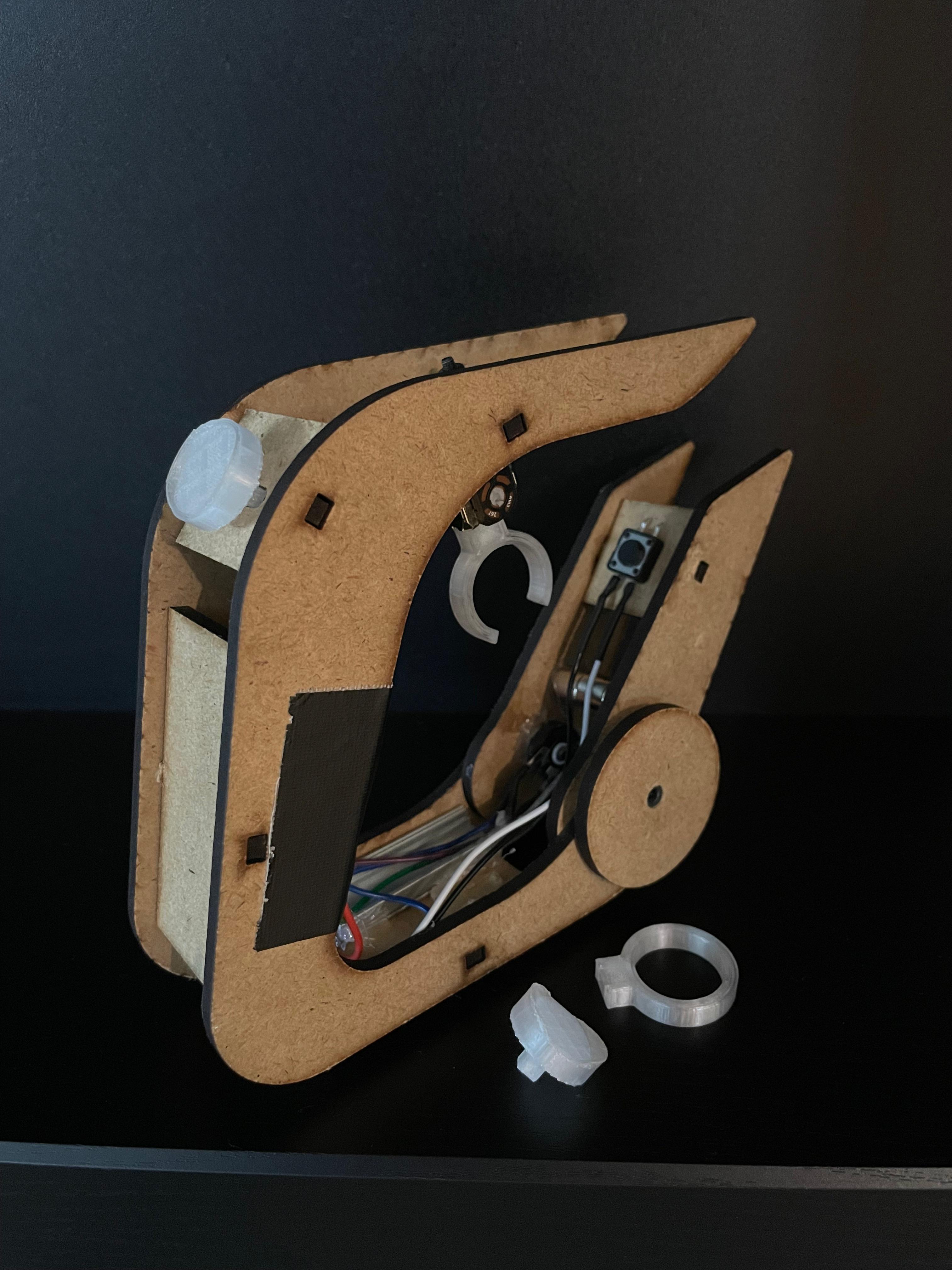
Prototypen
Funktionsprototyp
Designprototyp



Melanie Medlhammer, Tom Blatz, Sarah Teller
BetreuungProf. Michael Schuster, Anna Raveling
Tags